



【摘要】:图4-4 舵机工作原理框图减速齿轮组由电动机驱动,其齿轮组的输出轴带动一个线性的比例电位器,该电位器把输出轴转过的角度θ转换成比例的电压反馈给控制电路,控制电路将其与输入的控制脉冲信号进行比较,产生纠偏脉冲,并驱动电动机正向或反向转动,使齿轮组的输出位置与期望值相符,令纠正脉冲趋于为0,从而达到使舵机精确定位的目的。
舵机是一个典型闭环反馈系统,其工作原理由图4-4所示。
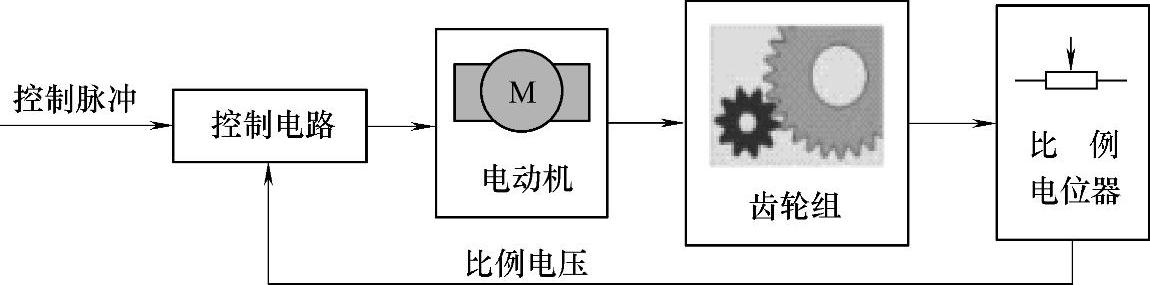
图4-4 舵机工作原理框图
减速齿轮组由电动机驱动,其齿轮组的输出轴带动一个线性的比例电位器,该电位器把输出轴转过的角度θ转换成比例的电压反馈给控制电路,控制电路将其与输入的控制脉冲信号进行比较,产生纠偏脉冲,并驱动电动机正向或反向转动,使齿轮组的输出位置与期望值相符,令纠正脉冲趋于为0,从而达到使舵机精确定位的目的。(https://www.xing528.com)
舵机的控制信号为周期20ms的脉宽调制(PWM)信号,其中脉冲宽度从0.5~2.5ms,相对应舵盘的位置为0°~180°,呈线性变化。也就是说,给它提供一定的脉宽,它的输出轴就会保持在一个相应的角度上,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应的位置上。舵机内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,外加信号与基准信号通过比较器比较,判断出方向和大小,从而产生电机的转动信号。由此可见,舵机是一种位置伺服的驱动器,转动范围不能超过180°,适用于那些需要角度不断变化并可以保持的驱动设备。
伺服电动机是靠接受不同占空比的脉冲信号,从而转化成相应的平均电压,以此来驱动其内部小电动机带动齿轮转动。舵机其具体的脉冲宽度与舵机角度的对应关系如图4-5所示。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。