



【摘要】:下位机采用性价比高的PIC16F877单片机,上位机和下位机通过RS232串口或者无线模块进行连接和通信。下位机主要负责传感器信息接收及初级处理、电机驱动和运动控制等工作。下位机的控制又分成舵机控制和直流电机控制两大部分:一部分是手臂及头部的舵机控制系统:舵机的控制系统主要包括机器人的控制核心——PIC16F877单片机、数据存储模块、通信模块以及其他的硬件控制模块。下面主要介绍舵机控制模块。
舵机的控制信号可由FPGA(Field-Programmable Gate Array,现场可编程门阵列)、模拟电路或单片机来产生。采用FPGA或CPLD产生PWM波已经在很多重要的场合得到应用,依靠其特有的并行处理能力和大量的I/O接口,可以同时控制几十甚至上百个舵机同时工作,这种方法可靠、控制精度高,但是成本较高,适用于重要场合。用模拟电路实现较复杂,而且产生的脉冲频率和脉宽不是很准确,很难实现精确控制。由于单片机具有性能稳定、编程灵活、精度较高、价格低廉等特点,一般采用单片机作为舵机控制器。
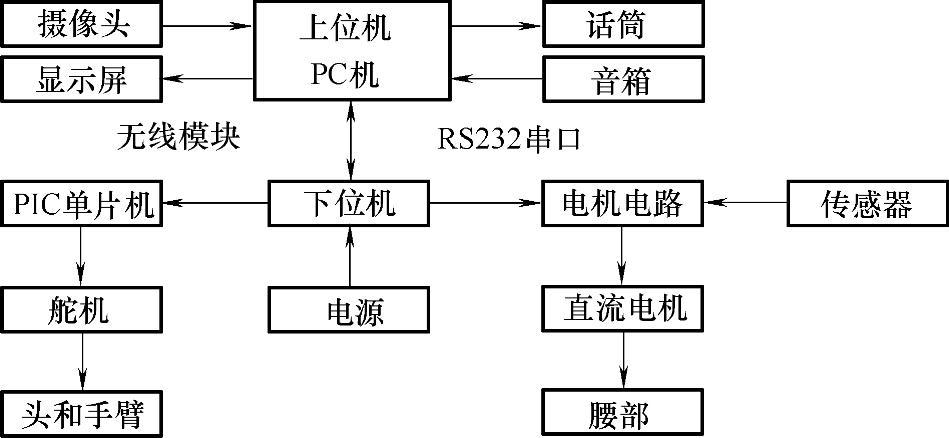
图4-7 机电系统结构图(https://www.xing528.com)
以上介绍了舵机的相关概念,那么在情感机器人的电控系统中舵机是如何工作的呢?在情感机器人电控系统中我们采用了上下位机相结合的体系结构,机电系统的结构如图4-7所示。上位机采用计算机控制,主要优点是速度快,各种外部接口设备多,连接存储空间大的PC。上位机主要负责运算量大、计算复杂的图像处理、语音识别和语音合成工作。下位机采用性价比高的PIC16F877单片机,上位机和下位机通过RS232串口或者无线模块进行连接和通信。下位机主要负责传感器信息接收及初级处理、电机驱动和运动控制等工作。
下位机的控制又分成舵机控制和直流电机控制两大部分:一部分是手臂及头部的舵机控制系统:舵机的控制系统主要包括机器人的控制核心——PIC16F877单片机、数据存储模块、通信模块以及其他的硬件控制模块。另一部分是转腰、弯腰实现的直流电机控制系统:主要包括直流电机控制、无线接收控制、传感器编码控制、手焊转接控制。下面主要介绍舵机控制模块。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。