



上位机控制软件由北京科技大学机器人研究课题小组独立开发,本部分上位机软件的作用是生成机器人的运动数据,并对机器人的运动数据进行传输和编辑。其主界面如图4-14所示。
控制软件的主界面可以分为以下几个区域:菜单控制区,速度控制区,同步选择控制区,舵机微调控制区,数据发送控制区,运动数据显示区以及功能控制区等。在菜单控制模块中有一个初始位置设定菜单,点击后出现的子菜单如图4-15所示。
其中,三个子菜单对应机器人初始化位置控制的三个选项。通过设置初始化位置子菜单,可以设置机器人上电后的初始化位置。点击浏览按钮后,就可以把要加载的机器人运动数据读取出来,点击发送按钮,则控制软件开始向机电综合平台发送数据。如果数据传输成功,点击确定之后,点击运行按钮,机电综合平台就可以按照传输的数据进行动作了。
此外,软件还可以对数据进行微调。在舵机微调控制区选择其中的一组数据,双击之后,这组数据就可以在上面的各个滑动块中体现出来。通过拉动滑动块,可以改变每个CHx对应的数据,调整完毕后点击修改按钮就可以把改动的数据重新保存到原来的位置。界面上方有一个同步的选项,有ON和OFF两个选项,如果选OFF选项,点击发送按钮将调整后的数据发送,但此组数据并不执行。如果选择ON选项,则在滚动条调整数据的时候,多路舵机控制板就可以控制舵机转动,从而使表情机器人同步的作出相应动作,也就是可以实时显示微调结果。
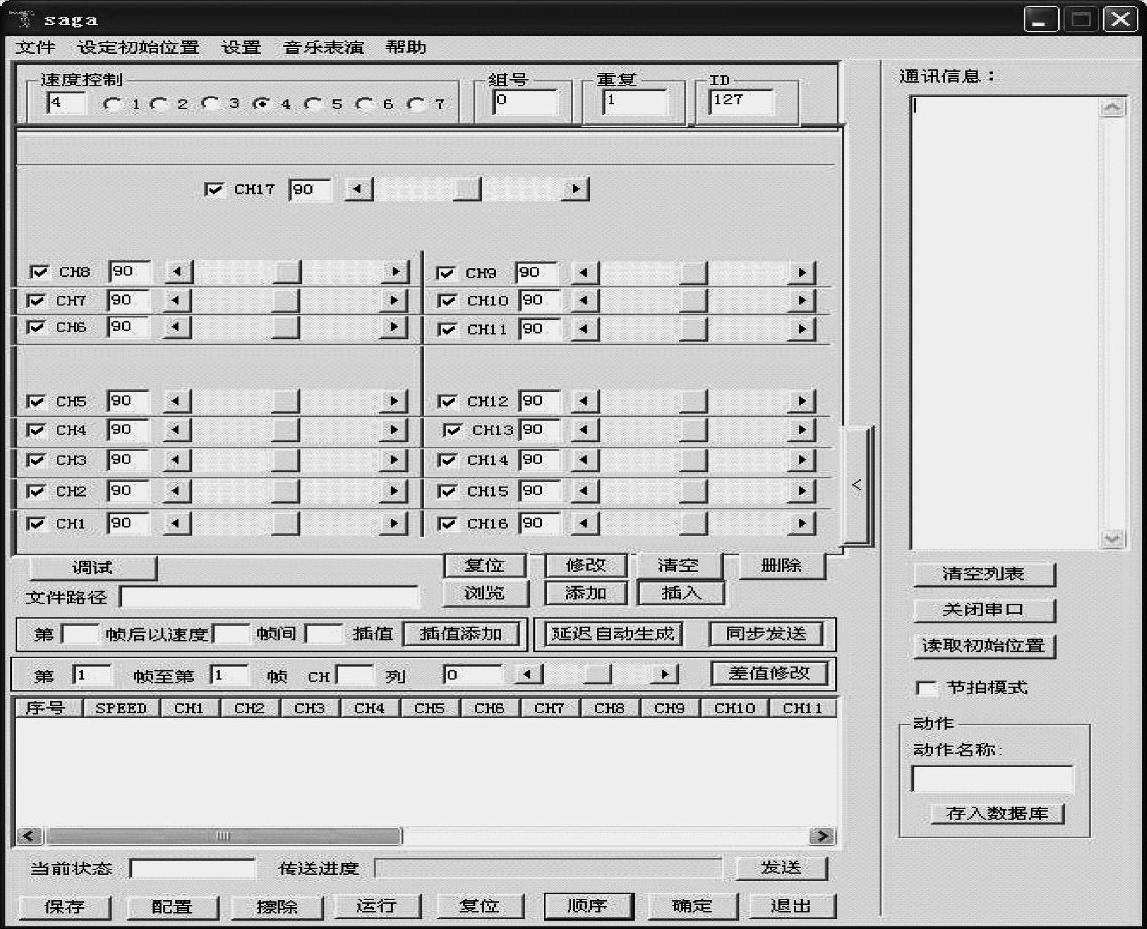
图4-14 控制软件主界面
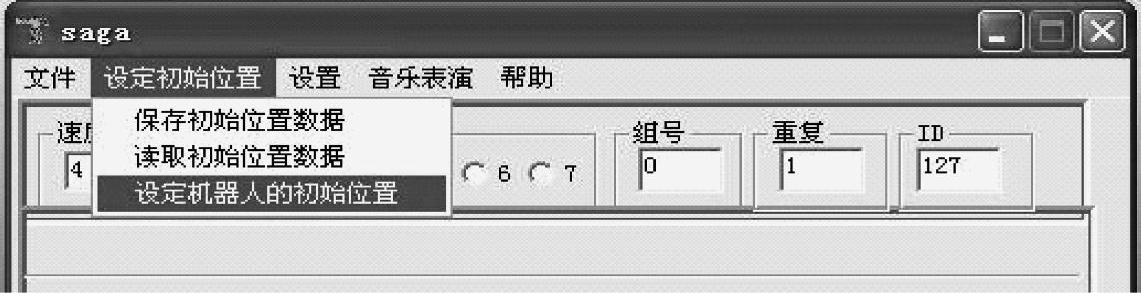
图4-15 初始化菜单示意图(https://www.xing528.com)
随着机器人动作数量的增加,如果按照上面介绍的方法对动作数据进行一一传送的话,会使工作量骤增,而且不利于对动作的整体把握。因此,我们在上位机软件中增加了动作编排。动作编排的操作菜单如图4-16所示。
动作顺序编排的界面如图4-17所示,图中可以看出,最多可以同时编排20组动作进行传送。假设我们存取机器人动作数据时的顺序为1)点头;2)眨眼;3)皱眉;4)左转头;5)右转头;6)向右看;7)向左看;8)向上看,若现在想让它执行6)向右看——1)点头——7)向左看——4)左转头,则依次点击动作6、动作1、动作7、动作4即可,此时,我们会注意到右边框里1—4中的数据也发生了改变。1—4对应的数据变成为6、1、7、4,点击确定后返回主界面,再点击顺序,即可按要求运行。至此,我们就可以看到情感机器人的各种表情,本章开始部分已截取部分表情图片,当然我们也可以通过修改或者扩展得到更多的表情和动作。
图4-16 动作编排菜单
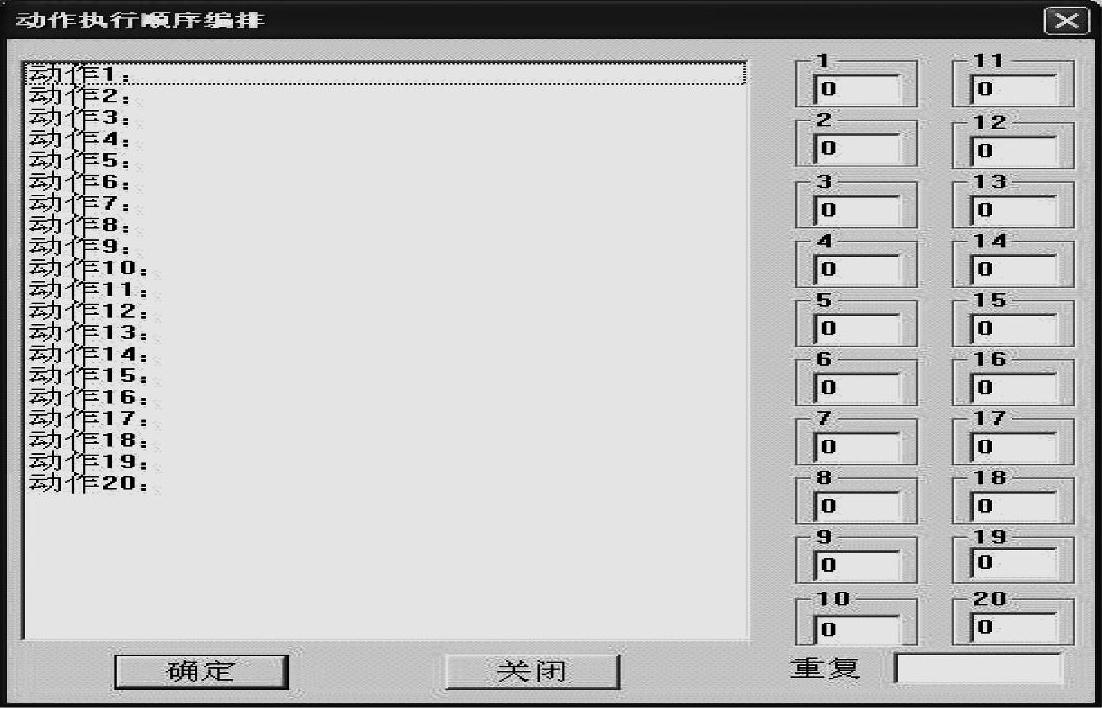
图4-17 动作执行顺序编排界面
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。