



我们所设计的情感机器人应能同人进行生动顺畅的语言交流;能够识别不同的交互对象及人类的表情;拥有丰富的面部表情、语调和身体姿态;能够自主移动;具备简单的情感和心理活动;能判断测量周围物体的距离;能够与数字家庭网络中的其他设备(家用电器,家庭网关等)进行信息交互与控制。
根据上述特点,可将情感机器人的具体功能抽象成相应的程序和算法来实现,见表7-1。
表7-1 机器人功能软件实现
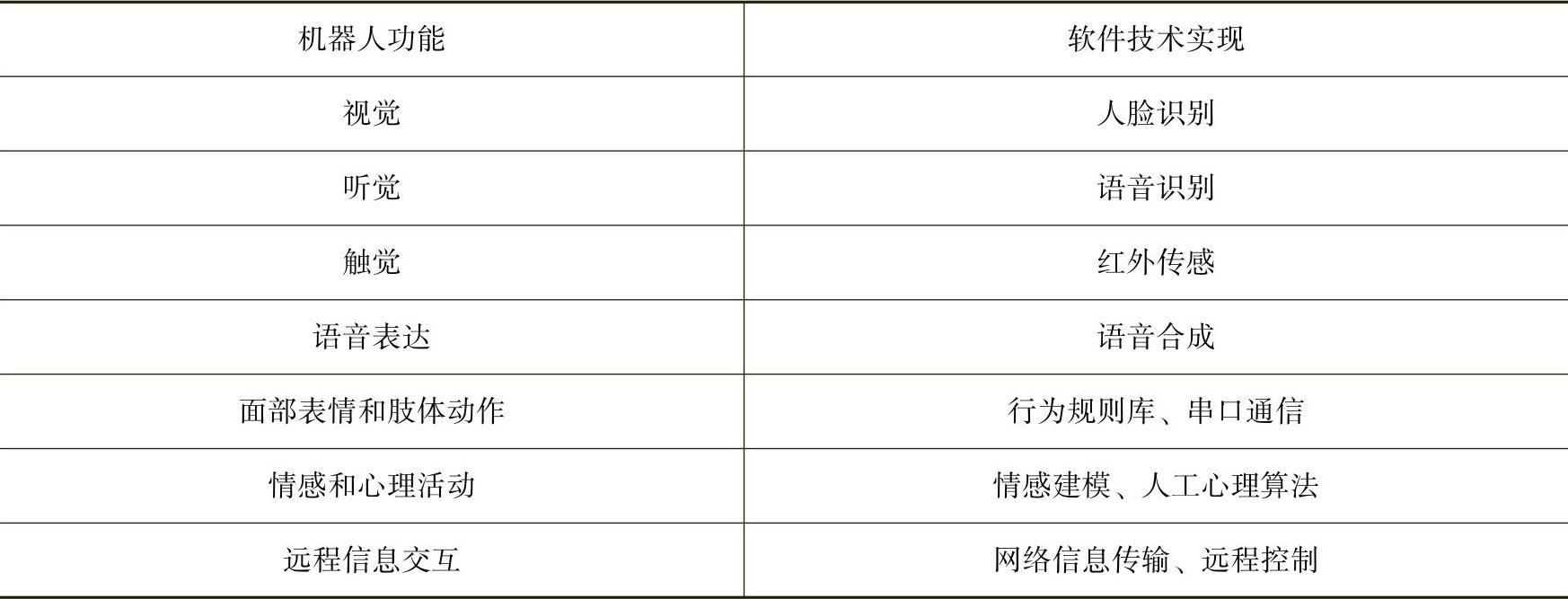
在软件交互平台的设计中采用了模块化的设计思想。根据表7-1的抽象关系,将每一个功能的程序代码封装成一个独立的模块,再将这些相对独立的功能模块集成进软件平台中,不仅使程序的结构清晰、接口简单,还有利于以后加入新的功能模块,从而提高了系统的可扩展性。具体功能模块设计如图7-10所示。
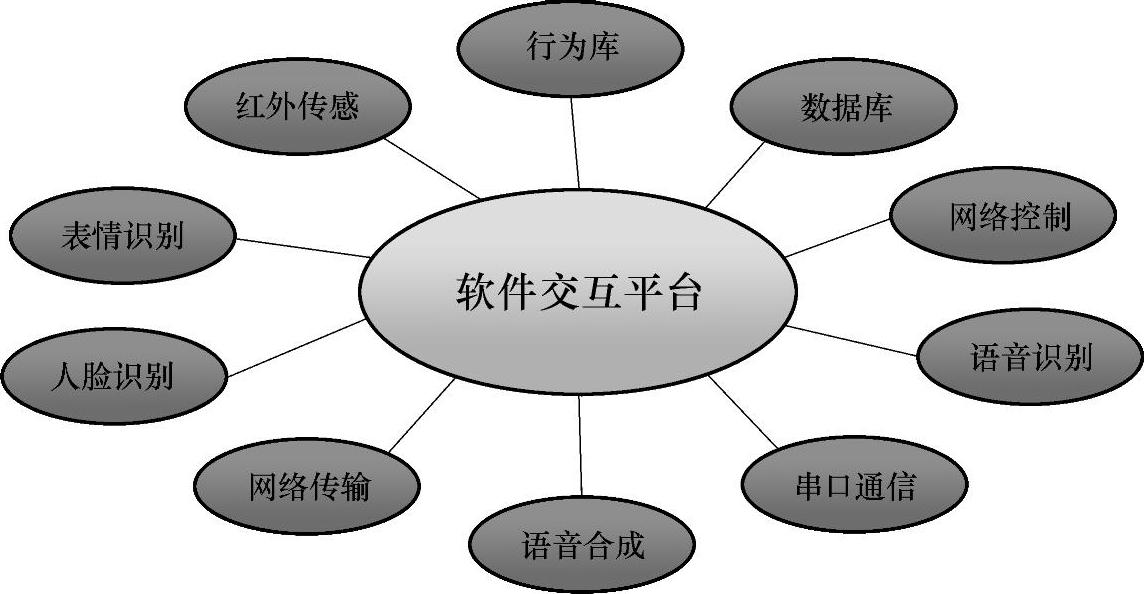
图7-10 软件功能模块设计图
软件交互平台集成了语音识别、语音合成、人脸识别、表情识别、串口通信、网络控制、网络数据传输、超声波感应、数据库等功能。这些模块的具体功能介绍如下:
语音识别功能模块:实现中文语音的识别,可以通过基于内容的语音情感识别来获取情感信息。(https://www.xing528.com)
语音合成功能模块:实现中文语音的合成,可以切换男生或女生发音,通过语音内容来表达机器人的情感状态。
人脸识别功能模块:通过人脸检测得到人脸区域,通过模板匹配等算法对此区域的图像进行特征提取和识别,确定人脸信息。
表情识别功能模块:识别人脸的表情,确定人脸的检测区域,对此区域运用光流法等算法识别表情,可作为表情交互的重要通道。
串口通信模块:实现上下位机通信,向下位机发送控制命令,控制机器人动作并获取下位机的传感器反馈信息,对机器人的动作进行在线纠错。
多传感器融合模块:本模块中配置四种传感器,热释电红外传感器,声源点位传感器,超声波传感器和触摸传感器。热释电红外传感器主要检测是否有人到来;声源点位传感器主要用于检测人在哪个方位与机器人进行交谈,以便于机器人能够正面面向人;超声波传感器主要用于检测人与机器人的距离以满足机器人三原则;触摸传感器主要用来实现机器人与人的一个交互手段。此模块通过多传感器的信息采集实现机器人对外部世界的感知。
网络控制及传输模块:通过无线网络,机器人能够与数字家庭中的其他在线设备进行交互;传输获取其他设备信息;遥操作其他网络设备;在网络环境中实现自主行为(主动与人打招呼,家庭安防等)。
数据库及行为库模块:通过模块中具体的行为规则和情感建模与数据库进行参照和匹配,从而决策交互机器人的行为。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。