



异步电动机机械特性的大致形状主要通过临界点的坐标来观察。
1.临界转矩 详细的定量分析不属本书的介绍范围。这里,只是根据两种极端情况,大概地分析其变化趋势。
(1)当ku=kf→1时,有
kf(x1+x2′)>>r1如果忽略r1不计,则
即当ku=kf趋近于1时,TKX的大小趋近于TKN值。
(2)当ku=kf→0时,有
kf(x1+x2′)<<r1
如果忽略kf(x1+x2′)不计,则有
即当ku=kf趋近于0时,TKX的大小趋近于与ku成正比。需要说明的是,因为在kf=1时,x1+x2′>>r1,所以只有当kf<0.1时,kf(x1+x2′)<<r1才是成立的。
综合上述两种极端情况可以看出,从kf=1→kf=0的过程中,TKX是逐渐减小的。开始时减小得比较慢,当kf很小时,TKX减小得较快。
2.临界转差 由式(2-18)可知:
(1)kf→1时,如忽略r1不计,则
所以,sK′X和ΔnX几乎不变。
(2)kf→0时,如忽略kf(x1+x2′)不计,则
sK′X≈kfr2′/r1∝kf
所以,sK′X和ΔnX都随kf而减小。
今将某一电动机的计算结果列于表2-2中。(https://www.xing528.com)
表2-2 ku=kf<1时的临界点坐标
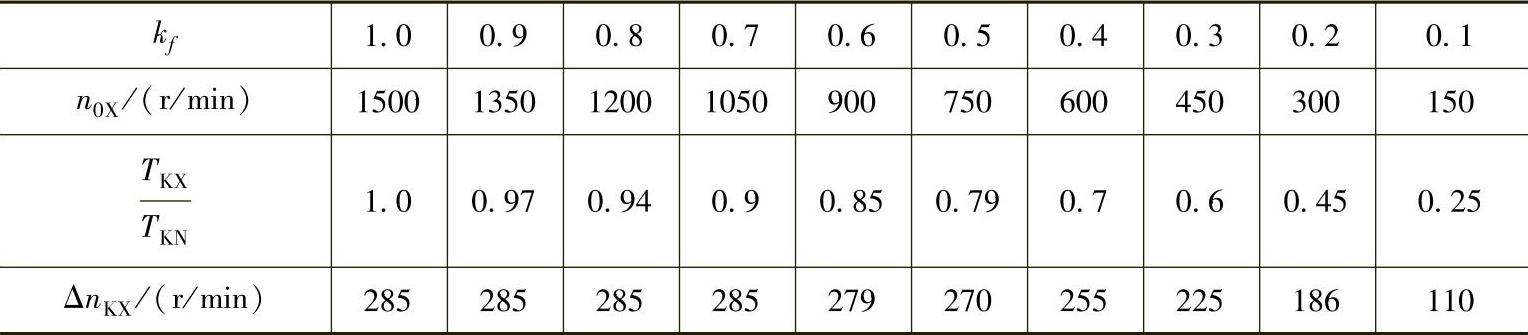
由表2-2的数据作出的ku=kf<1时的机械特性曲线簇如图2-18所示。由图可知:
(1)fX不同时,在相同转矩时的速度降ΔnX变化很小,所以工作区的机械特性曲线大致是平行的,保持了较硬的机械特性。
(2)随着fX的下降,临界转矩TKX逐渐减小,电动机的带负载能力也随之下降。
3.TKX减小的物理意义如2.4.2节所述,用ku=kf来维持电动机的主磁通不变(ΦM=const)的方法,是以U1近似地代替E1(认为U1≈E1)的结果。这种近似代替,是以忽略阻抗压降ΔU1为代价的。
问题是,当f1=fX下降,U1=UX也按比例下降时,ΔU1=ΔUX是否也按比例下降?近似式UX≈EX(EX为f1=fX时的反电动势)能否始终成立?
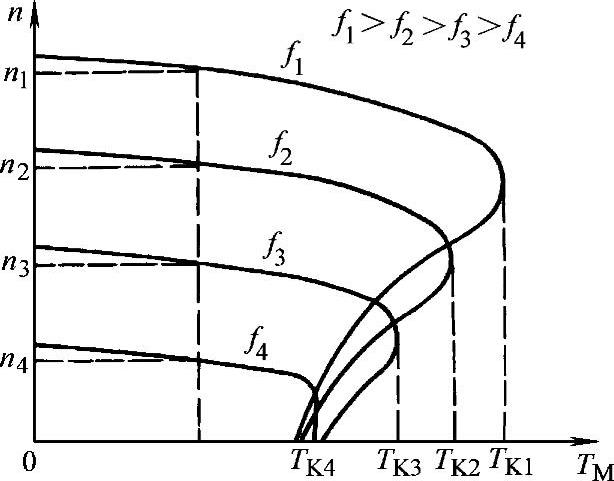
图2-18 ku=kf<1时的机械特性
当f1=fX时,阻抗压降是

式中 ΔUX———f1=fX时的阻抗压降;
ΔUr———定子绕组的电阻压降;
ΔULX———f1=fX时,定子绕组的漏抗压降。
fX下降时,漏抗压降ΔULX=kfI1x1也随着下降,但电阻压降ΔUr=I1r1却与fX无关。因此,当UX随着fX下降时,ΔUX在UX中所占的比例逐渐增大,而EX所占的比例则逐渐减小,UX≈EX的误差越来越大。当UX降得很低时,式(2-6)的关系已不能成立,而成为

式(2-21)表明,在保持UX/fX=const的情况下,随着fX的下降,比值EX/fX也在减小,从而ΦM也减小。由式(1-25)可知,ΦM的减小,必将导致电磁转矩的减小。
对以上分析,可归结如下:
ku=kf↓→ΔUX/UX↑→EX/UX↓→ΦM↓→TKX↓
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。