



综上所述,在存在阻尼的一般情况下进行特征值分析,得到的特征值和特征向量一般为复数。严格地说,这些复数模态参数不同于实模态参数,但是我们可以近似地从复模态得到实模态的信息。在比例阻尼的特殊情况下(阻尼矩阵为质量矩阵和刚性矩阵的线性组合),复模态与实模态完全等价。这时,各个模态之间不存在耦合,一个模态储存与消耗的能量与其他模态无关。这种情况可以用模态坐标上的相互独立的单自由度系统来表示(如图3.8所示)。
对于实模态来说,各个点之间的相位关系是一定的(要么同相,要么反相),因此,对其放大或缩小并不改变其几何形状,即变形为零的模态的节点(线)位置不变。但是,复模态的各个点之间的相位不同,放大或缩小可能会引起模态实部与虚部之间的相对关系的变化(信息转移),使得模态节点(线)位置发生移动。因此,用不同的正规化方法可能使复模态形状发生变化。
尽管实模态只严格存在于数值分析的世界,在实际应用中,实模态的重要性却远大于复模态。复模态分析只是在某些特殊分析领域才得到应用,例如车闸的异声分析(Brake Squealing)、包含有控制系统的稳定性分析等。除非特别指明,通常所说的模态分析均指实模态分析。对于有阻尼系统,可以先略去阻尼,进行特征值分析,得到无阻尼系统的固有频率和模态形状,再将物理坐标上的联立方程转换到模态坐标上去。尽管实模态可以将质量和刚性矩阵对角化,但是一般不能同时将阻尼矩阵也对角化。因此,在模态坐标上,依然存在由模态阻尼的非对角元素而引起的模态耦合,如图3.9所示。
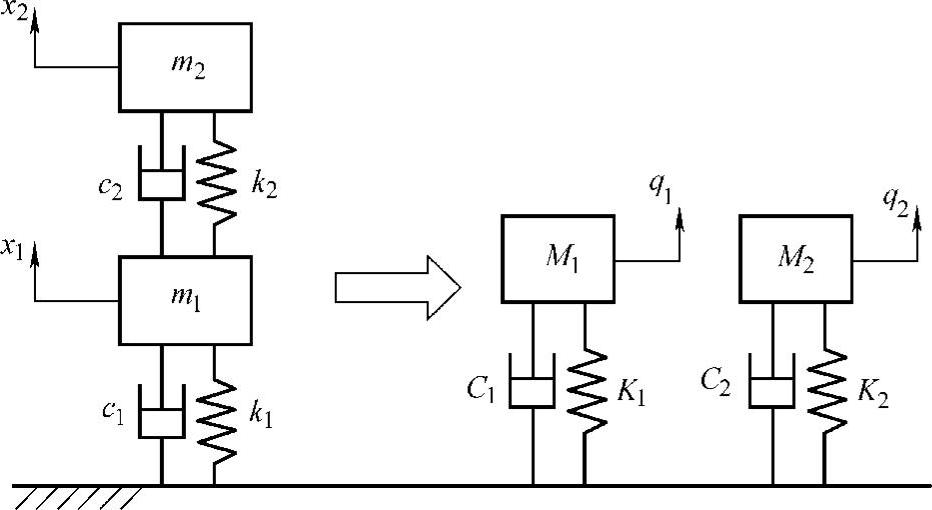
图3.8 比例阻尼下的物理坐标与实模态坐标(https://www.xing528.com)
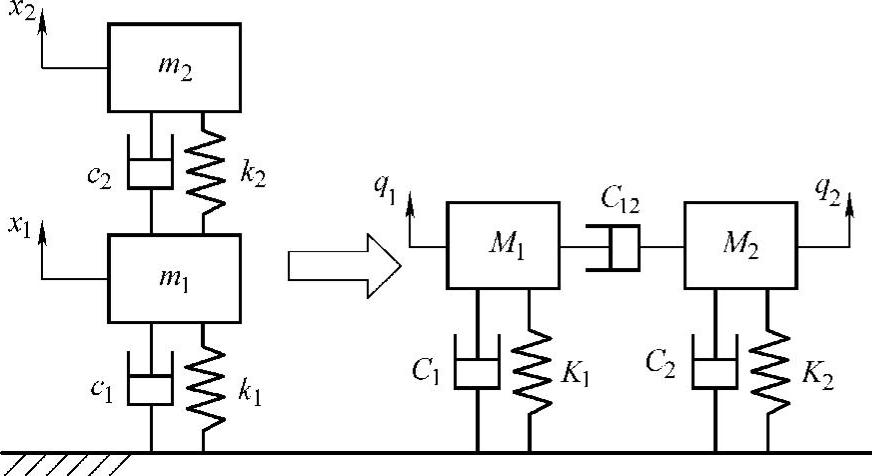
图3.9 非比例阻尼下的物理坐标与实模态坐标
需要指出,除了阻尼以外,主动控制系统、陀螺效应、空气动力效应或其他结构非线性特性(如摩擦)等原因也会导致非对称矩阵,产生复模态。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。