



伺服电动机工作参数也是影响电动机正常运行的因素。为此必须优化工作参数。包装机在正常工作时主要是作速度控制运行,相关的伺服参数调整如图1-2所示。
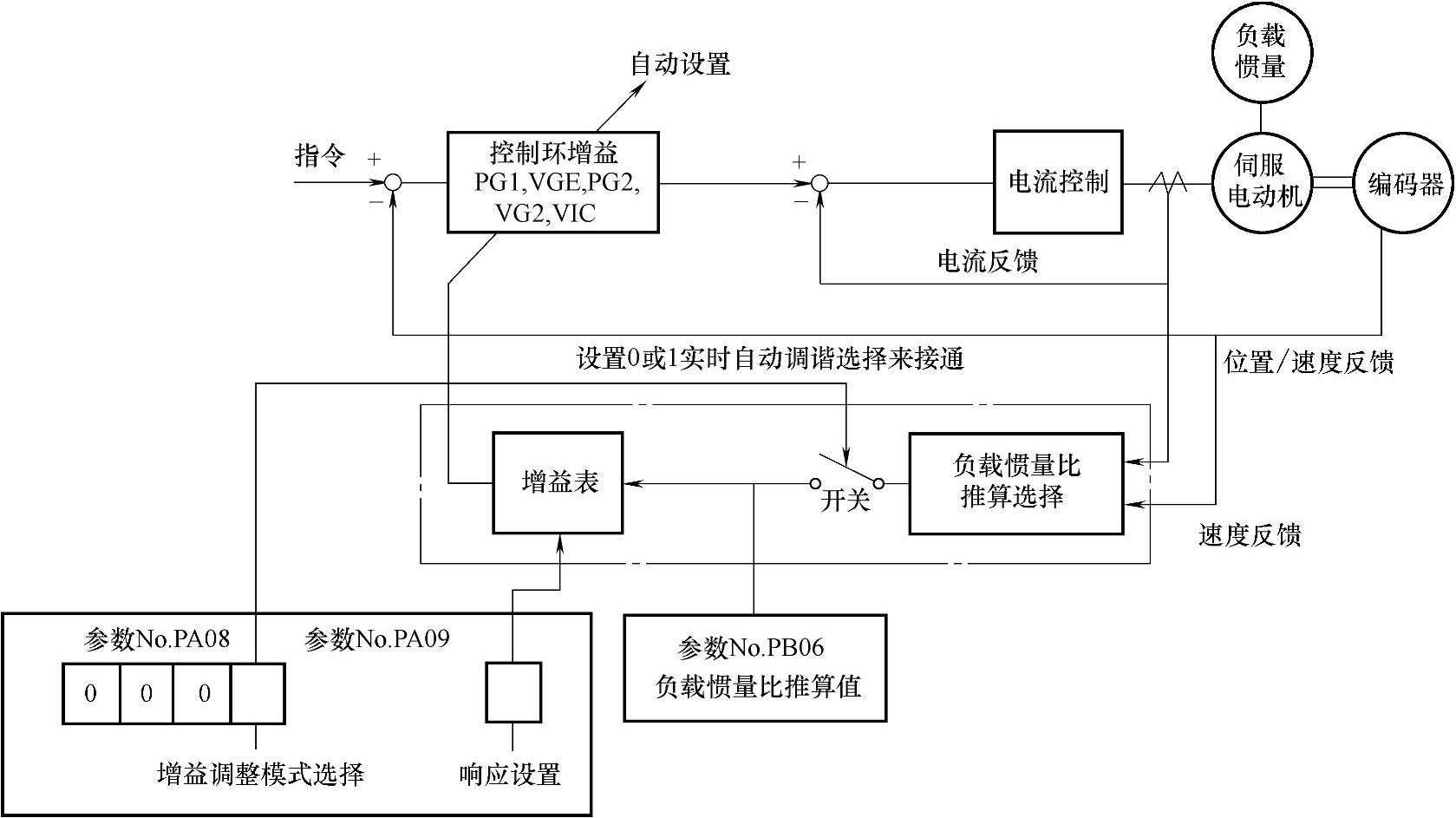
图1-2 伺服参数调整
1.第1级重要参数
参数“负载惯量比PB06”和“自动调谐响应等级PA09”是确定整个伺服系统响应等级的主要参数。
1)在系统自动调谐时,“负载惯量比PB06”由“反馈电流”和“反馈速度”所确定。即反馈电流越大,说明负载越大(负载惯量就越大)。反馈速度越低于指令值,说明负载越大(负载惯量越大)。
在实际调试中观察到有实际速度高于指令速度的现象,这说明设定的“负载惯量比”大于实际机械的“负载惯量比”,伺服系统加大了对伺服电动机的驱动,所以导致了伺服电动机的速度变大。
当实际速度低于指令速度时,说明设定的“负载惯量比”小于实际机械的“负载惯量比”,伺服系统对伺服电动机的驱动不足,所以导致了伺服电动机的速度变小。
调试的第一步是正确估算“负载惯量比”。先降低“自动调谐响应等级PA09”(7~9),然后逐步升高“负载惯量比”。
1轴带两辊筒和一齿轮箱,齿轮箱在偏心位置。电动机功率15kW,额定速度下的电流为额定电流的20%~40%。此时调节惯量比为28.8,尚可运行;调节惯量比为33.6,电动机出现鸣叫。所以选择惯量比为28.8是可行的。然后根据速度的超前和落后再减小惯量比。
调试时逐步降低“负载惯量比PB06”,先向下调至抖动后再向上,在1500r/min时不抖。因为电动机要求的惯量比在10以下,因此要逐步测定惯量比。惯量比设定过小,运行抖动;惯量比设定过大,则速度超过指令速度。(https://www.xing528.com)
2)“系统响应等级PA09”是最重要的参数,对系统运行影响最大。当1轴PA09=12时,震荡很大;PA09=7时,震荡消除。因此,应该逐步增大该参数。该参数对系统刚性影响最大,其设置范围为0~300,出厂时设置为7。
2.第2级伺服参数
1)PB07——模型环增益。参数PB07是用于设置到达“目标位置”的响应增益。增加参数PB07值可以提高指令响应性以改善运动轨迹性能。参数PB07还是属于改善位置控制功能的参数,所以简称PG1。参数PB07对消除加减速过程中各轴的相位误差有重要作用。
2)PB08——位置环增益。参数PB08用于增加位置控制响应级别,以抵抗负载干扰的影响。参数PB08值设置较大时,响应级别增大,但会导致震荡及噪声。本参数不能用于速度控制模式。
3)PB09——速度环增益。参数PB09值设置较大时,响应级别增大,但可导致震荡以及噪声。本参数对速度控制尤为重要。
PB09是最重要的参数之一,调节范围为1~3000。应该逐步上调,直至振动为止;然后往下调,遇有振动,设置共振频率抑制。该参数的单位是rad/s。
4)PB10——速度积分时间补偿。参数PB10用于设置速度环的积分时间常数。PB10值设置较小时,响应级别增大,但会导致震荡以及噪声。以不振动为原则,从大到小调节。
在系统作速度控制时,第1级重要参数为:PB06、PA09、PB09和PB10,第2级重要参数为PB07和PB08。
小结:对以上所有参数在可能的范围内进行了调节,但是仍然无法消除1轴的速度波动,因此,可以判断不是伺服电动机运行参数的问题。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。