



1.电/气转换器
电气转换器的工作原理见图6-20所示。它是按力平衡原理设计和工作的。在其内部有一个线圈,当调节器(变送器)的电流信号送入线圈后,由于内部永久磁铁的作用,使线圈和杠杆产生位移,带动挡板接近(或远离)喷嘴,引起喷嘴背压增加(或减少)。背压作用在内部的气动功率放大器上,放大后的压力一路作为转换器的输出,另一路馈送到反馈波纹管。输送到反馈波纹管的压力,通过杠杆的力传递作用在铁心的另一端产生一个反向的位移,此位移与输入信号产生电磁力矩平衡时,输入信号与输出压力成一一对应的比例关系。即输入信号从DC4mA改变到DC20mA时,转换器的输出压力从0.02~0.1MPa变化,实现了将电流信号转换成气动信号的过程。图中调零弹簧,用来调节转换器的零位,反馈波纹管起反馈作用。
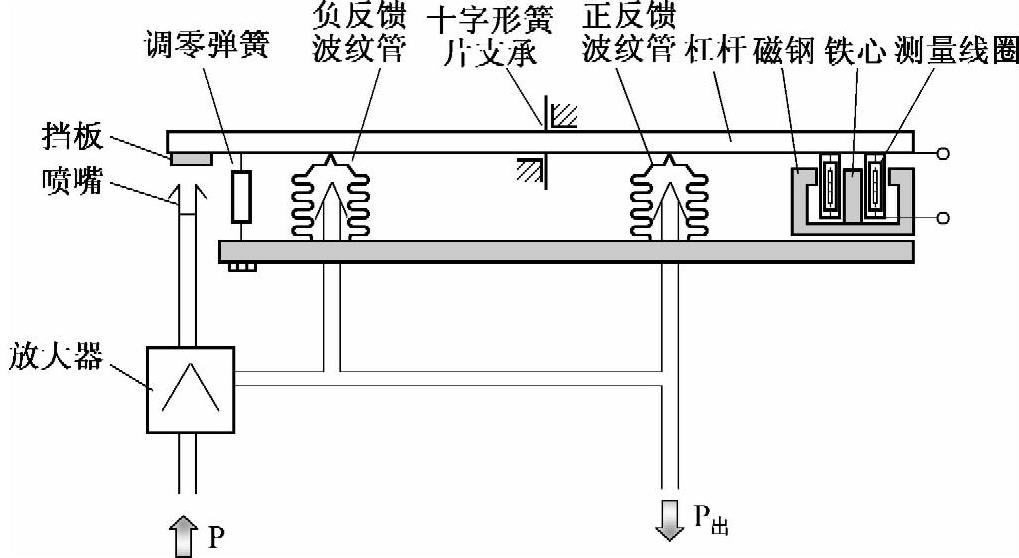
图6-20 电气转换器工作原理示意图
电/气转换器接收4~20mA直流信号,然后按比例地转换输出0.02~0.1MPa的气动信号,作为气动薄膜调节阀、气动阀门定位器的气动控制信号和其他气动仪表的气源,它起到电动仪表与气动仪表之间的信号转换作用。
2.阀门定位器
(1)阀门定位器的工作原理
阀门定位器是气动调节阀的辅助装置,与气动执行机构配套使用。它接受调节器的输出信号,然后成比例地输出信号至执行机构,当阀杆移动后,其位移量又通过机械装置负反馈到阀门定位器,因此定位器和执行机构构成了一个闭环系统,图6-21所示为气动阀门定位器功能示意图。来自调节器输出的信号P0经定位器比例放大后输出Pa用以控制执行机构动作,位置反馈信号再送回至定位器,由此构成一个使阀杆位移与输入压力成比例关系的负反馈系统。阀门定位器能够增加执行机构的输出功率,减少调节信号的传递滞后,加快阀杆的移动速度,提高信号与阀位间的线性度,克服阀杆的摩擦力和消除不平衡力的影响,从而保证调节阀的正确定位。
(2)阀门定位器的主要作用
阀门定位器是与气动执行器配套使用的。它接收调节器的输出信号,它的输出信号去控制控制阀运动。顾名思义,阀门定位器的功能就是使控制阀按调节器的输出信号实现正确的定位作用。
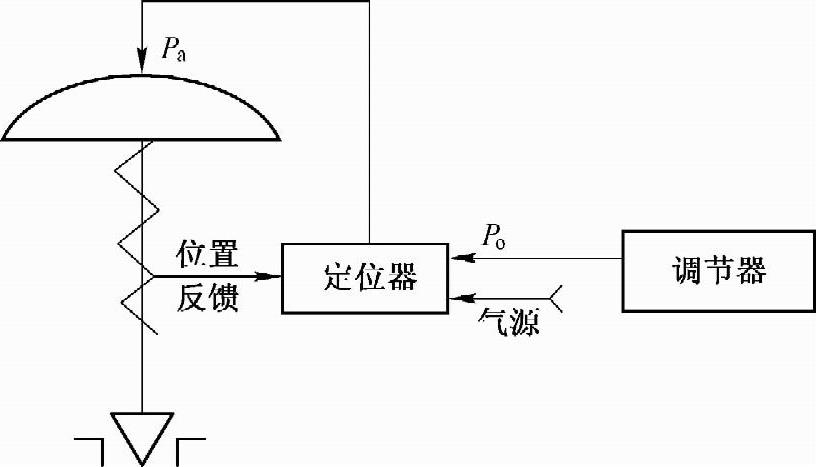
图6-21 阀门定位器功能示意图
阀门定位器是气动执行器的主附件,它与气动执行器配套使用,阀门定位器具有以下用途:
1)提高阀杆位置的线性度,克服阀杆的摩擦力,消除被控介质压力变化与高压差对阀位的影响,使阀门位置能按控制信号实现正确定位。
2)增加执行机构的动作速度,改善控制系统的动态特性。
3)可以20~100kPa的标准信号压力去操作40~200kPa的非标准信号压力的气动执行机构。
4)可实现分程控制。即用一台控制仪表去操作两台控制阀,第一台控制阀上定位器通入20~60kPa的信号压力后阀门走全行程,第二台控制阀上定位器通入60~100kPa的信号压力后阀门走全行程。(https://www.xing528.com)
5)可实现反作用动作。即采用反作用式定位器可使气开阀变为气关阀,气关阀变为气开阀。
6)可修正控制阀的流量特性。通过改变定位器反馈凸轮的形状,可使调节阀的线性、快开、等百分比流量特性互换。
7)可使活塞执行机构和长行程执行机构的两位式动作变为比例式动作。
(3)阀门定位器分类
从结构形式上分,阀门定位器可分为电/气阀门定位器、气动阀门定位器和智能阀门定位器。
1)电/气阀门定位器。接收4~20mA或0~10mA的直流电流信号,用以控制薄膜式或活塞式气动调节阀。它能够起到电/气转换器和阀门定位器两种作用。
图6-22是一种与薄膜式执行机构配合使用的电/气阀门定位器的原理图。它是按力矩平衡原理工作的。来自调节器或输出安全栅的4~20mA直流电流信号输入到转换组件的线圈中,由于线圈两侧各有一块极性方向相同的永久磁钢,所以线圈产生的磁场与永久磁钢的恒定磁场,共同作用在线圈中间的可动铁心(即杠杆)上,使杠杆产生位移。当输入信号增加时,杠杆向下运动(即做逆时针偏转),固定在杠杆上的挡板便靠近喷嘴,使放大器背压升高,经放大后输出气压也随之升高。此输出作用在膜头上,使阀杆向下运动。阀杆的位移通过反馈摆杆转换为偏心凸轮的角位移,并通过调量程支点(即滚轮)作用于反馈弹簧上,该弹簧被拉伸,产生一个反馈力矩,使杠杆顺时针偏转。当反馈力矩和电磁力矩相平衡时,阀杆就稳定在某一位置,从而实现了阀杆位移与输入信号电流成比例的关系。调整调量程支点的位置,即可满足不同阀杆行程的要求。
2)气动阀门定位器。直接接受气动信号,其品种很多。其工作原理与电/气阀门定位器类似,如图6-23所示。
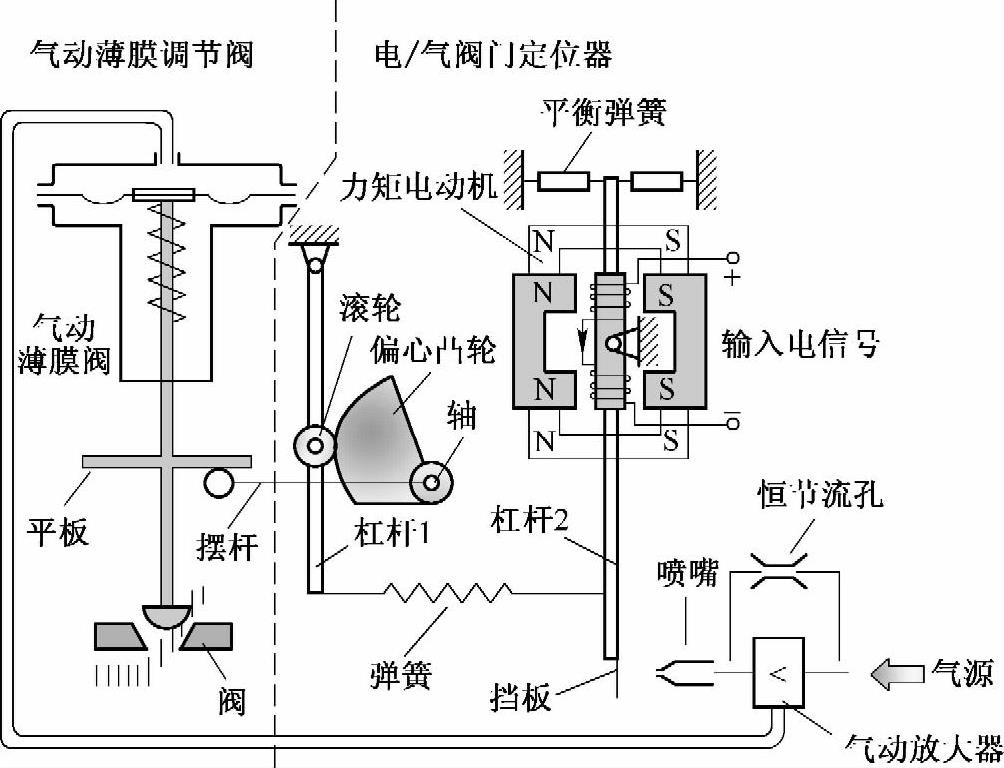
图6-22 电/气阀门定位器
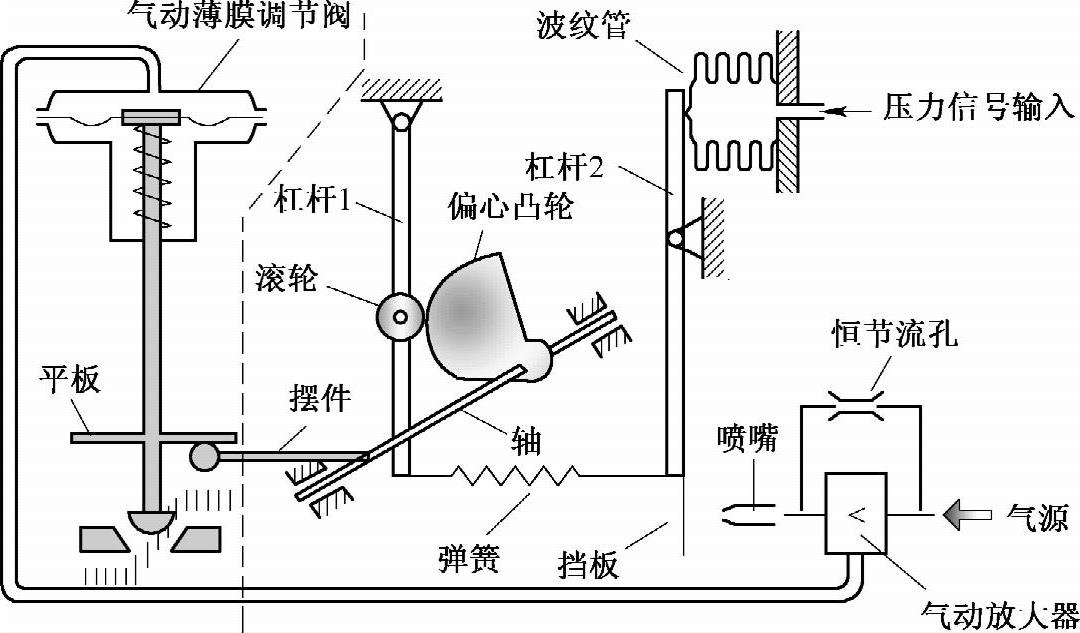
图6-23 气动阀门定位器
3)智能式阀门定位器。智能式阀门定位器有只接收4~20mA直流电流信号的,也有既接收4~20mA的模拟信号又接受数字信号的,还有只进行数字信号传输的现场总线阀门定位器。它们均用以控制薄膜式或活塞式气动调节阀,如图6-24所示。
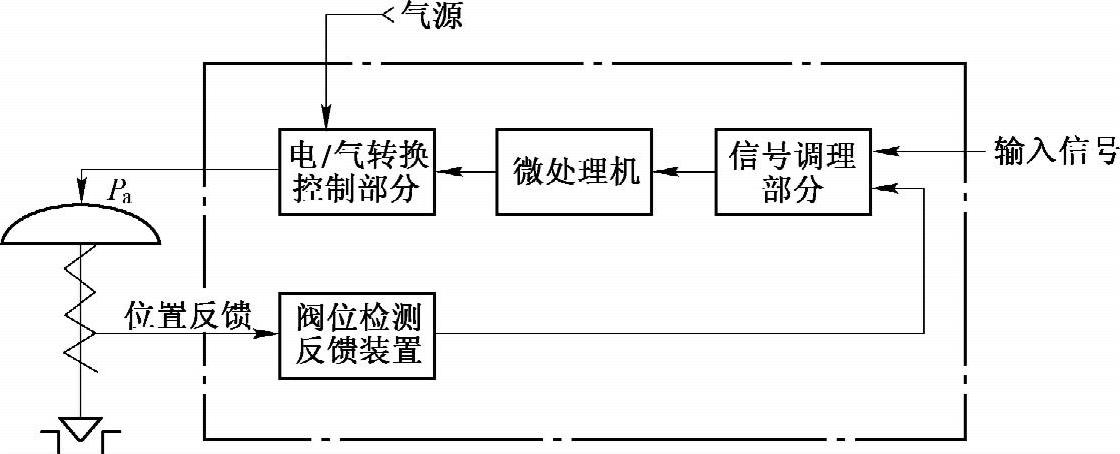
图6-24 智能式阀门定位器的构成原理
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。