



SINAMICSS120的调试软件为Starter或者是Scout,其中,Scout软件中包含Starter软件,两者不能同时安装。Scout软件需要授权,而Starter软件不需要授权。目前,Scout软件的最新版本为V4.1.5,Starter软件的最新版本为V4.1.5。
在安装Starter与Scout之前,需要安装STEP7软件的最新版本,例如StarterV4.1.5需要STEP7V5.4SP4。另外,如果想使用S120的DCC功能,还要安装CFC的最新软件及授权。
1.驱动参数配置
笔记本与S120的连接有两种方式,DP通信卡或者是RS232的连接。常用的DP通信卡有CP5512、CP5511、CP5613等,RS232则需要计算机配有232接口,采用标准的RS232电缆即可。
打开Scout软件后,新建一个项目,开始对驱动参数进行配置,如图4-34所示。
1)插入驱动单元。
2)选择驱动类型CU320。
3)选择装置的版本号,注意此版本号要与CF卡的版本相一致,CF卡的版本如图4-35所示。
4)选择PC与驱动的通信方式,如果有以太网接口CBE20,可以设置为IP。
5)设置驱动DP地址,此地址应该与CU320上的拨码开关相一致,如图4-36所示。
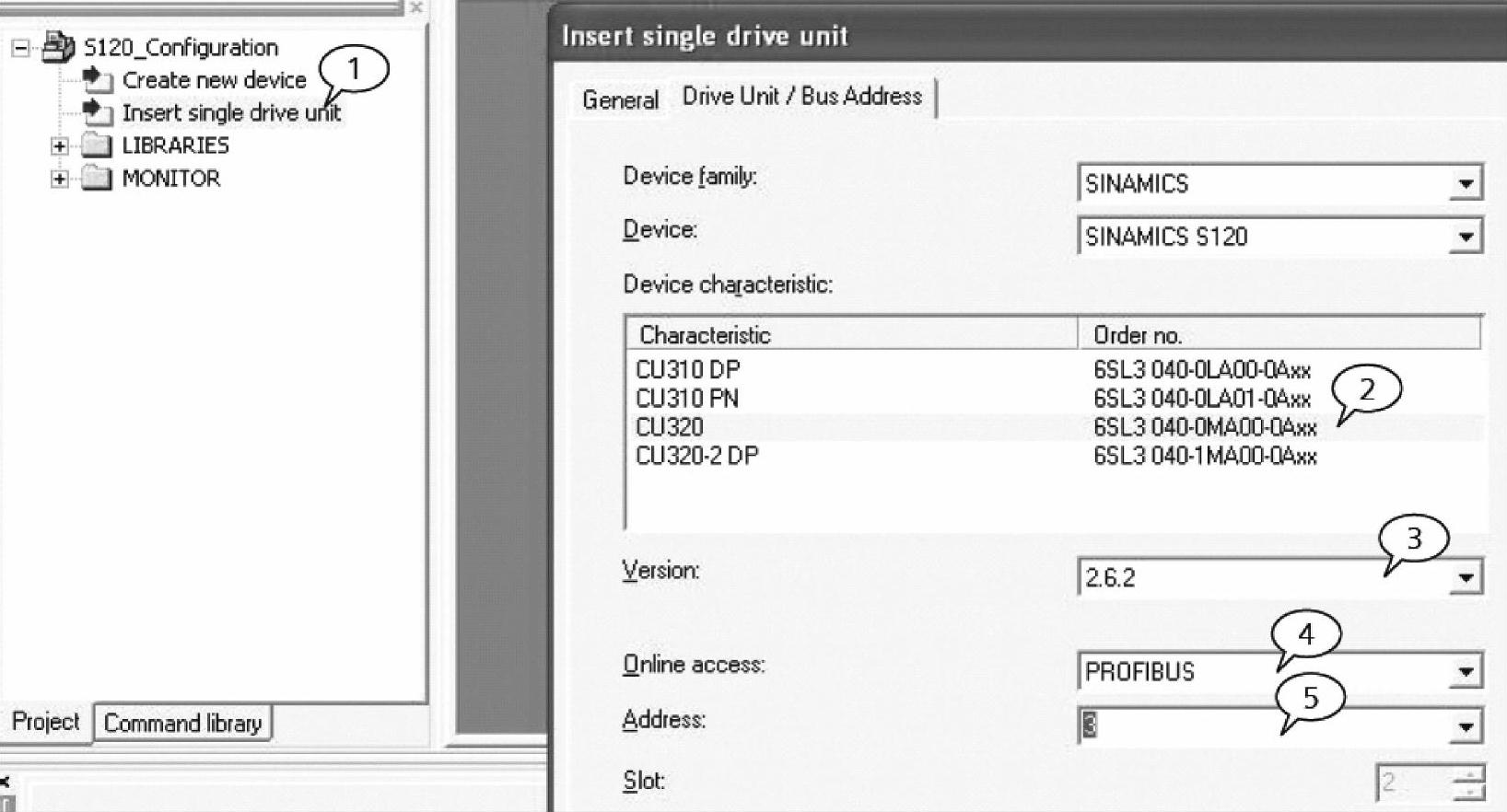
图4-34 驱动参数配置

图4-35 CF卡的版本
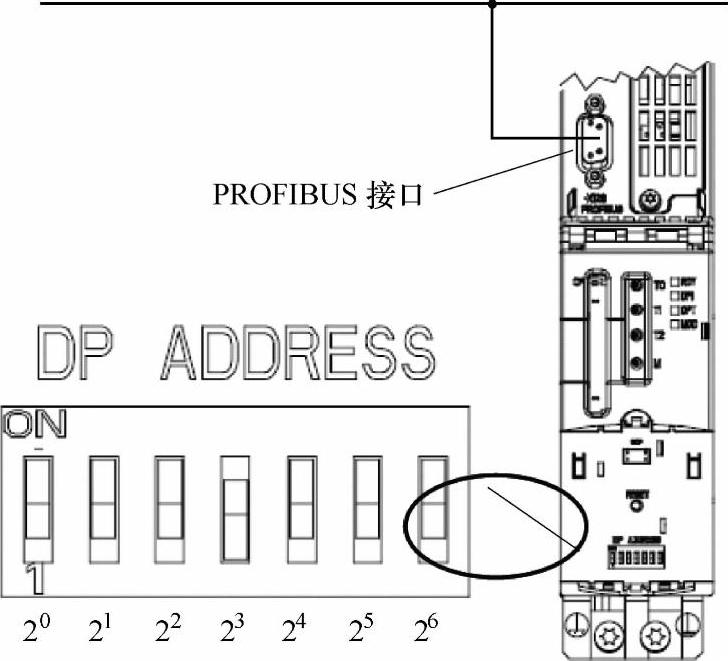
图4-36 设置驱动DP地址
另外,还可以通过另外一种方式自动读取驱动装置,如图4-37所示。
1)在Option选项中将“SetPG/PCinterface”设定为相应的通信方式,如“S7ONLINE(Step7)→CP5512(PROFIBUS)”。
2)通过“Accessiblenodes”来在线读取相连接的设备。
3)如果CF卡的信息能被CU320识别,可以在方框栏中看到装置信息。
4)勾选此装置,点击“Accept”接受。
5)接受后左边会显示读取到的装置。
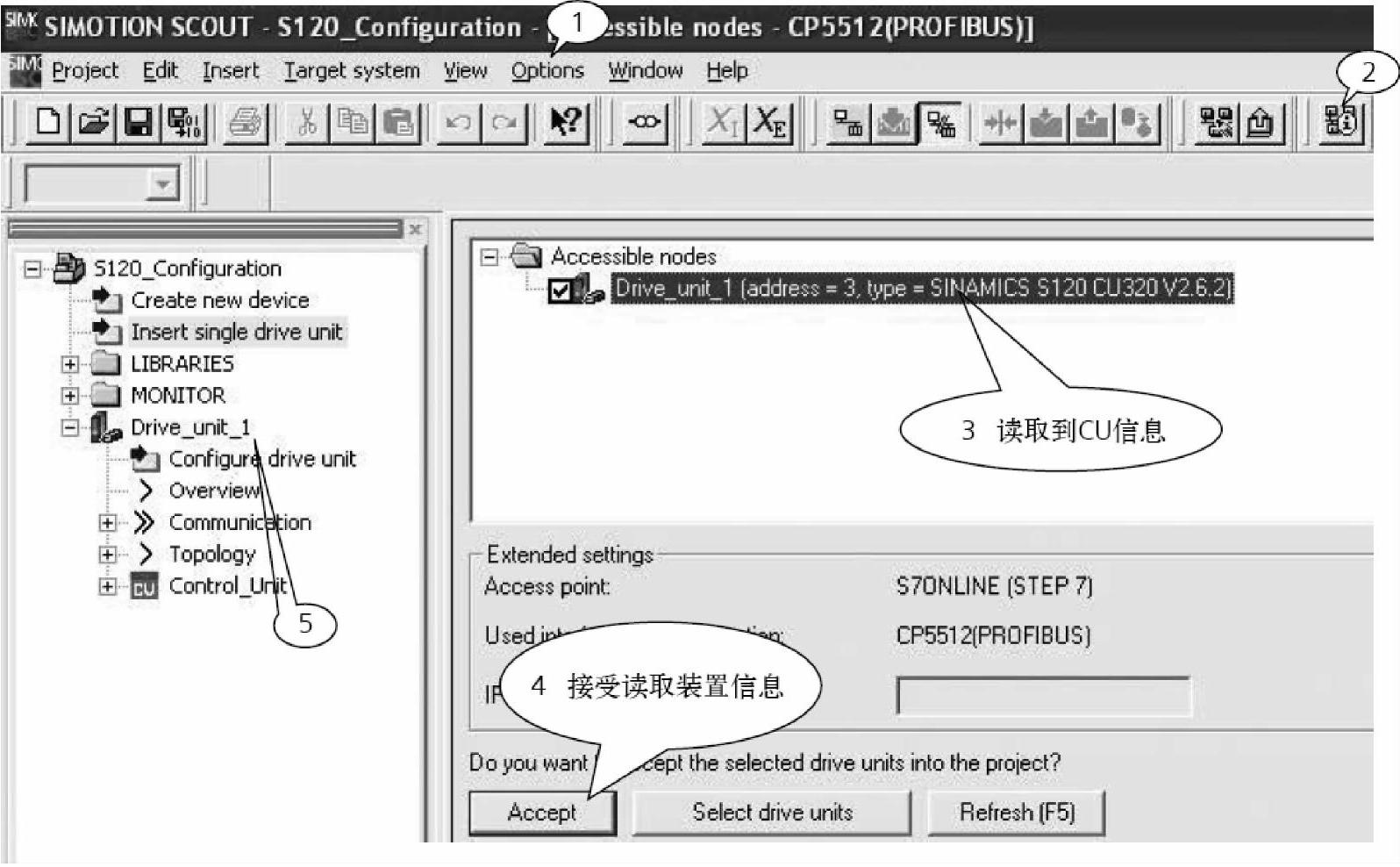
图4-37 自动读取驱动装置
2.对驱动进行在线组态
在正确插入驱动装置后,应该进行相应的在线项目组态,如图4-38所示。
1)选中Drive unit 01,点击“在线”,在线后装置前端的符号变成绿色。
2)同样选中Drive unit 01,点击“恢复工厂设定”。
3)双击“AutomaticConfiguration”,系统会自动弹出自动组态界面。
4)点击“Startautomaticconfiguration”进行自动组态。
5)根据自动组态的提示,选择“Servo”或者是“Vector”,如图4-39所示。
自动组态通常花1min左右时间,如果在组态过程中要进行Firmware升级,则需要更长时间,并且在升级完毕之后系统要求重新上电。
3.电动机数据与编码器数据设置与读取
集成DRIVE-CLIQ接口的电动机,可以通过自动组态的方式将电动机与编码器的数据读出,如图4-40所示。(https://www.xing528.com)
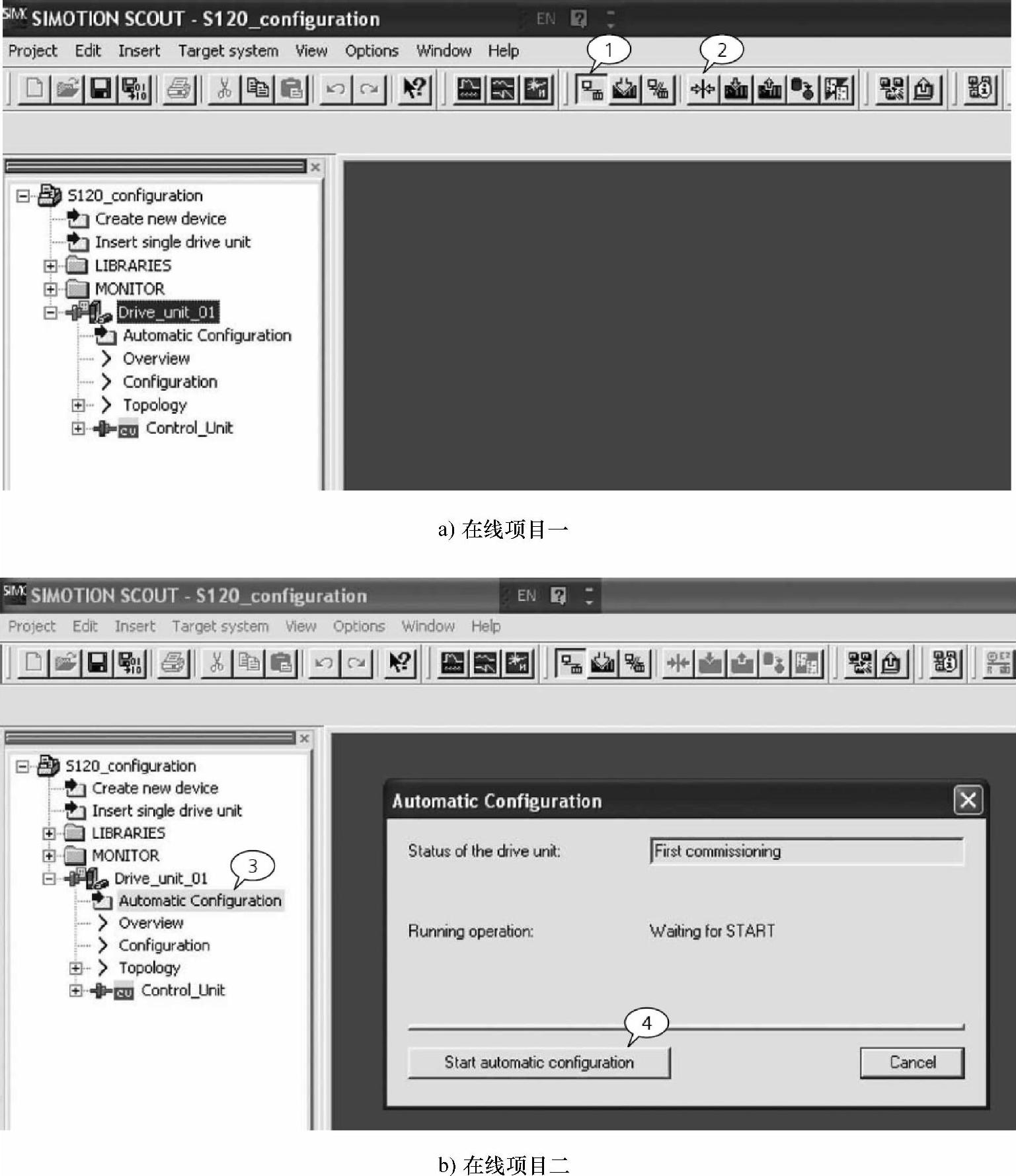
图4-38 在线项目组态
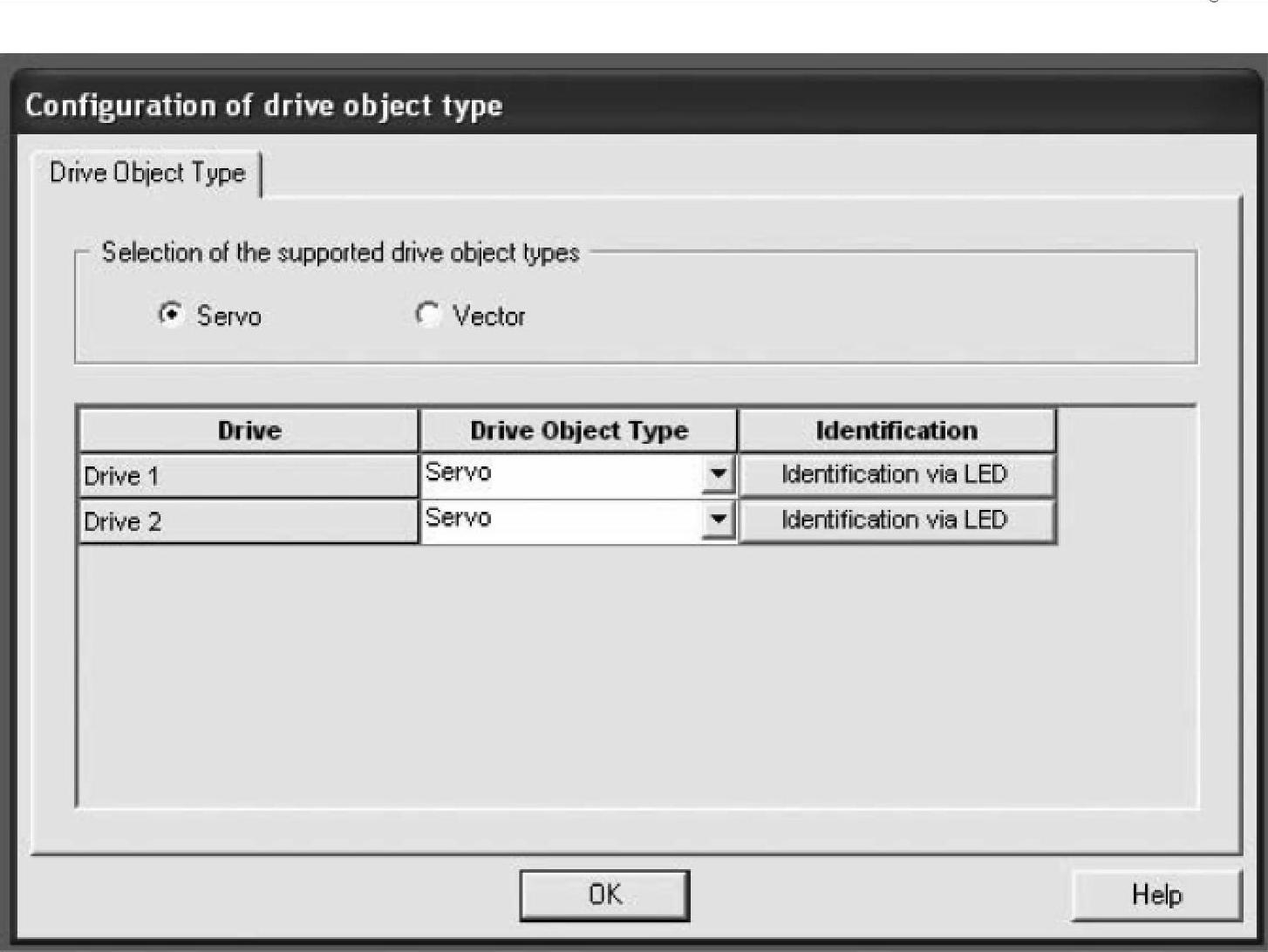
图4-39 选择驱动类型
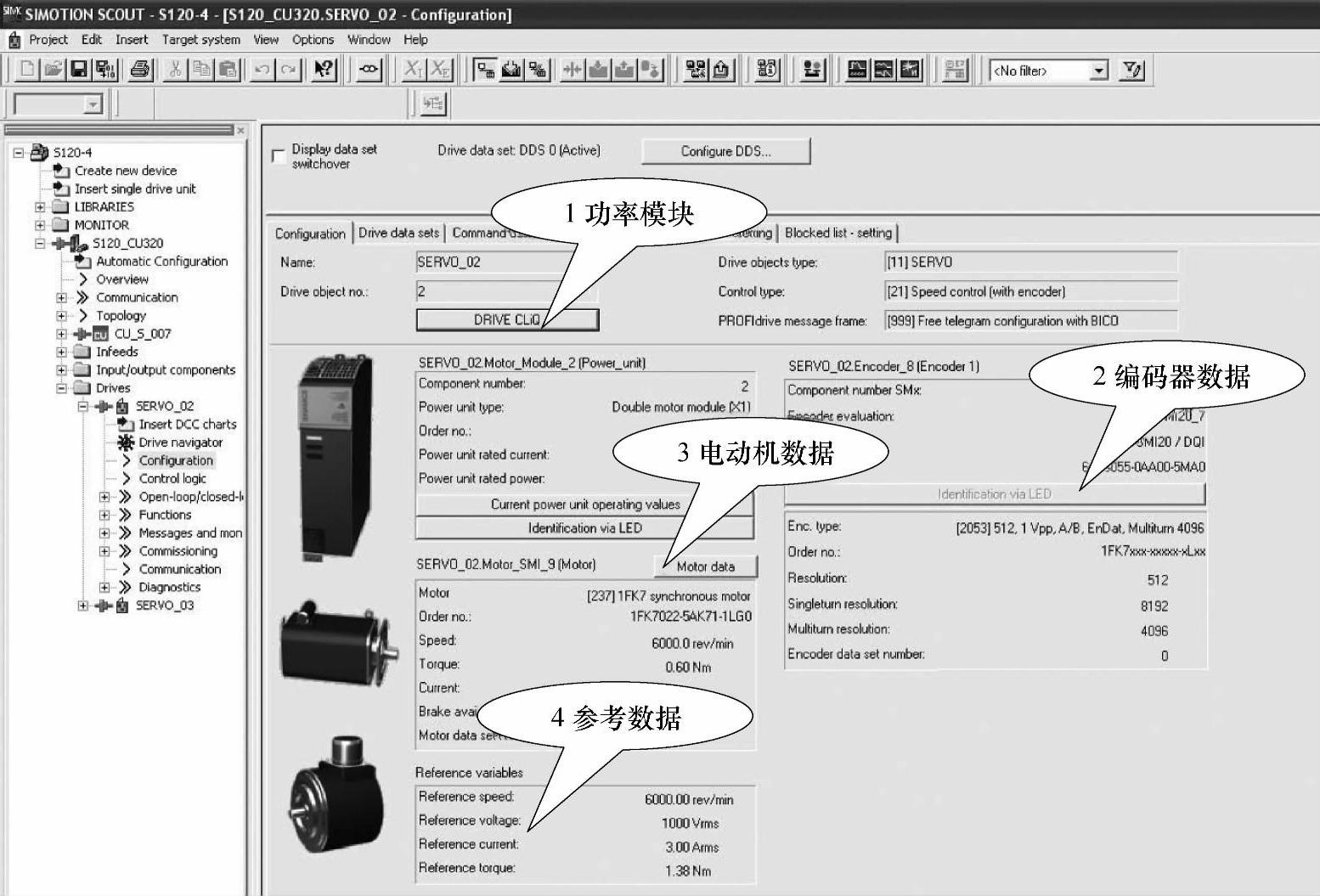
图4-40 通过自动组态的方式将电动机与编码器的数据读出
对于不集成DRIVE-CLIQ接口的电动机,电动机数据与编码器数据都为空,因此必须手动设定(见图4-41)。
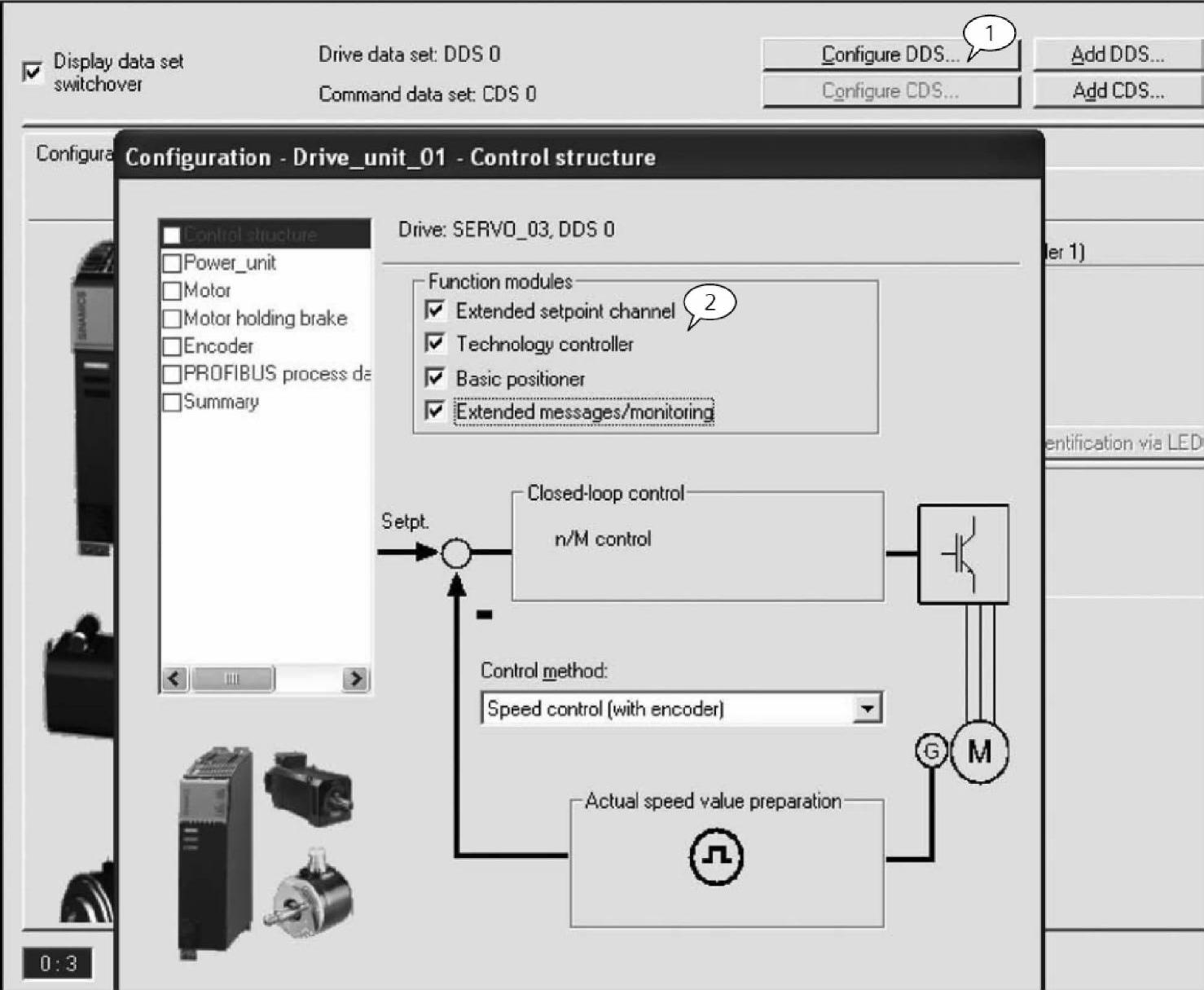
图4-41 手动设置参数
步骤如下:
1)开始离线组态Servo_03。
2)选择需要的功能模块。
①Extendedsetpointchannel:扩展设定通道,包括多段速度设定、电动电位计、斜坡函数发生器、速度限制等。
②Technologycontroller:工艺控制器,即PID控制器,常用于压力、张力、温度等物理量的控制。
③Basicpositioner:基本定位,包括回零点、位置点动、软硬限位、64个位置块、MDI等功能。
④Extendedmessages/monitoring:扩展信息监控,包括电动机转速、负载扭矩以及电动机温度等物理量监控。
注意:系统在默认的情况下4种扩展功能都不激活,在不使用的情况下激活会占系统资源。
3)设定控制方式。
在离线配置过程中,对于西门子电动机或者编码器,可以从列表中选择相应的电动机与编码器型号,而第三方电动机与编码器,必须正确填写电动机与编码器数据,如图4-42所示。
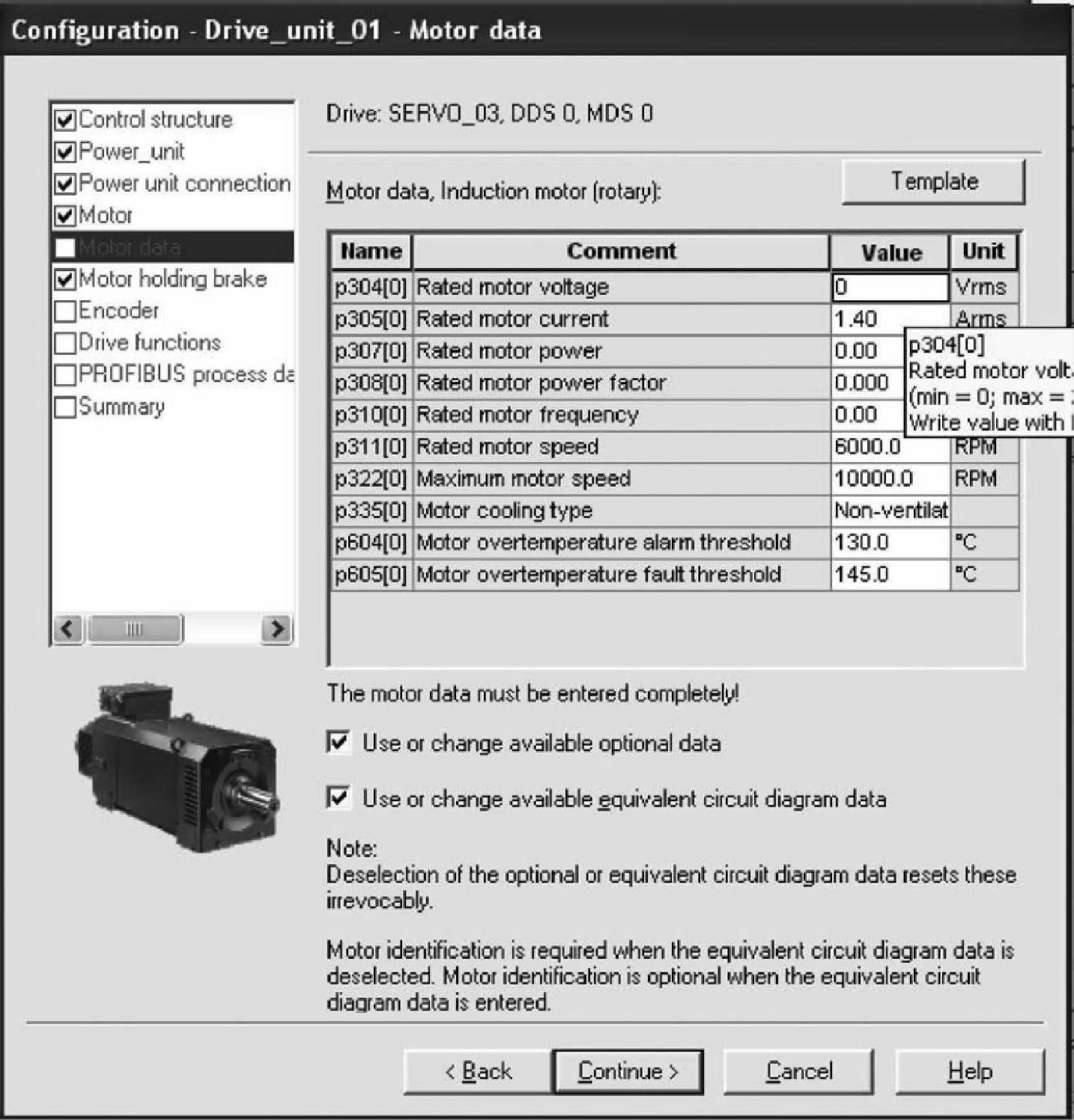
图4-42 电动机数据
需要注意的是,在对第三方电动机数据的设置过程中,电动机的主要基本数据必须正确填写,至于电动机辅助数据与等效电路数据,在知道的前提下尽量如实填写,在不清楚的情况下可以通过电动机数据计算与静态测量的方式确定。
配置完电动机数据后,配置编码器的数据,对与西门子电动机配套的编码器,可以通过电动机的订货号来确定其集成的编码器型号,如果采用外配编码器,则需要对编码器的数据进行设定,如图4-43所示。这些数据包括:①选择旋转编码器或者光栅尺;②选择编码器的类型;③编码器供电电压;④编码器连接方式;⑤编码器脉冲数或者编码方式;⑥增量编码器类型;⑦零脉冲个数;⑧同步电动机磁极位置识别;⑨精同步选择。
4.通过软件的控制面板来控制电动机
离线配置完成后,编译保存。在线后发现Drive unit01前面的符号半红半绿,表示离线项目与在线实际项目不符,需要将离线项目下装到装置中,如图4-44所示。其步骤包括:在线→驱动状态→下装→同时复制到ROM区。
通过以上操作完成了对驱动的基本配置,可以通过驱动中的控制面板转动电动机,以保证电动机与编码器的转向与实际设计相一致,如图4-45所示。
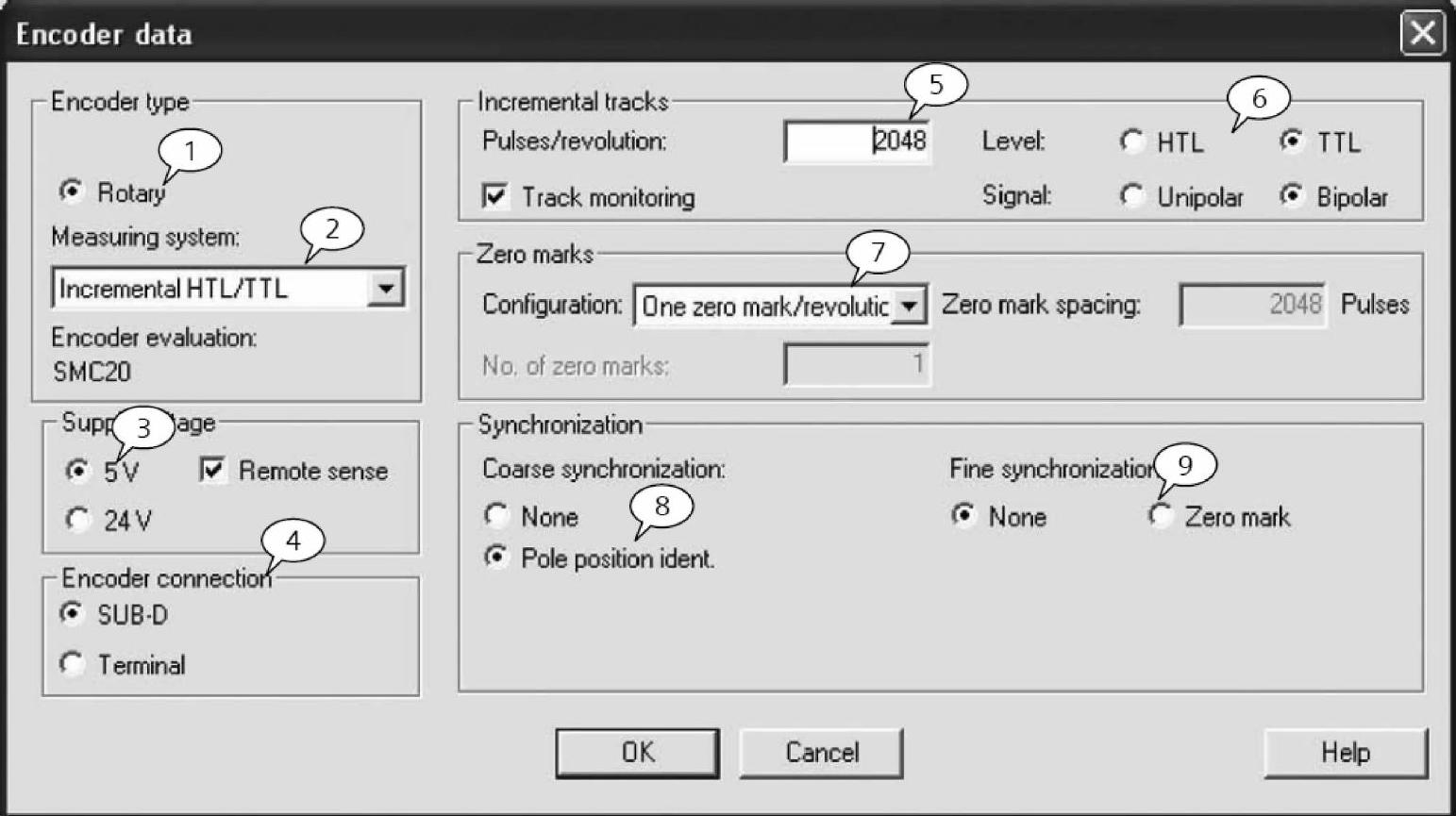
图4-43 编码器数据设定
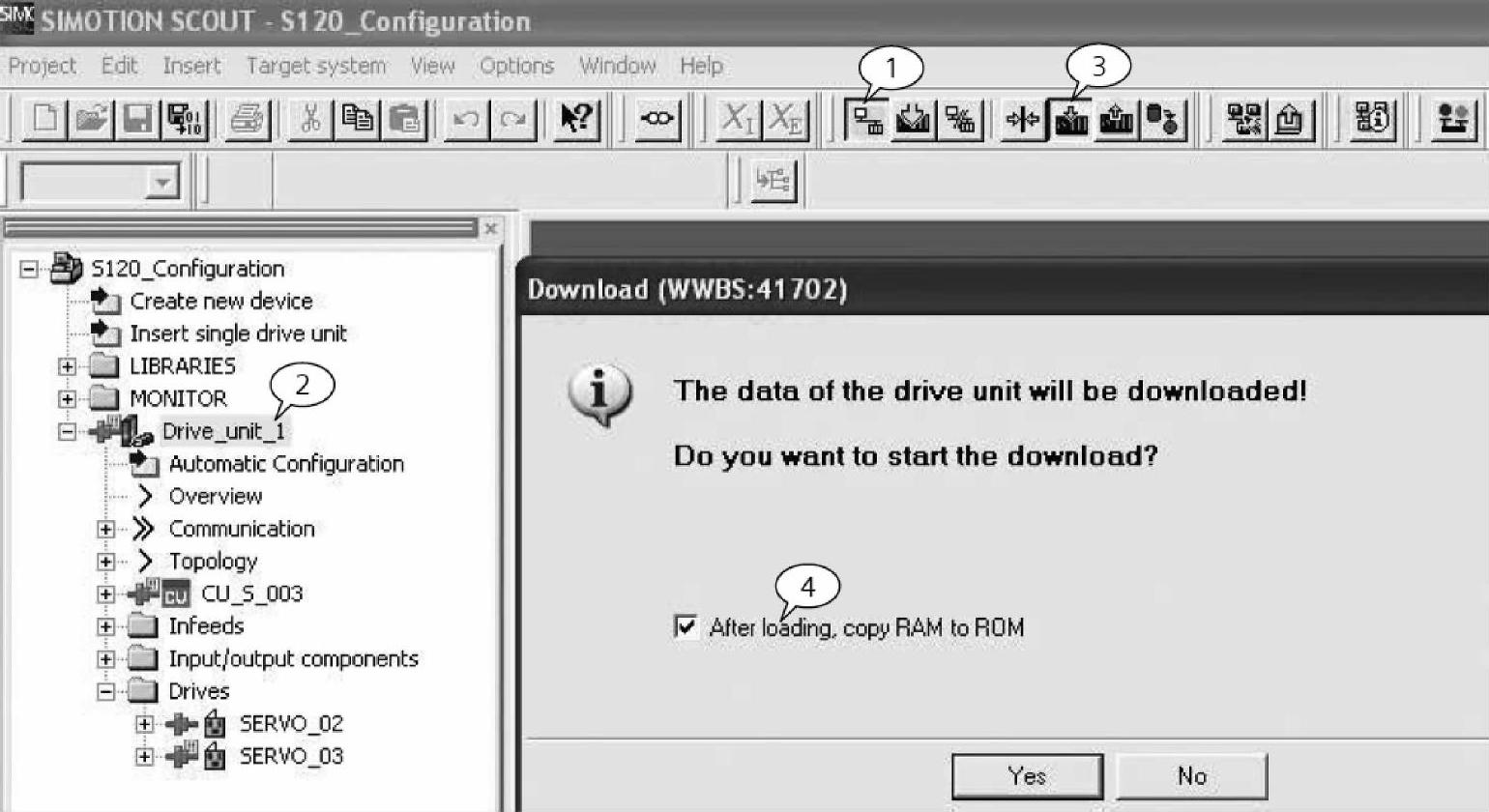
图4-44 将离线项目下装到装置
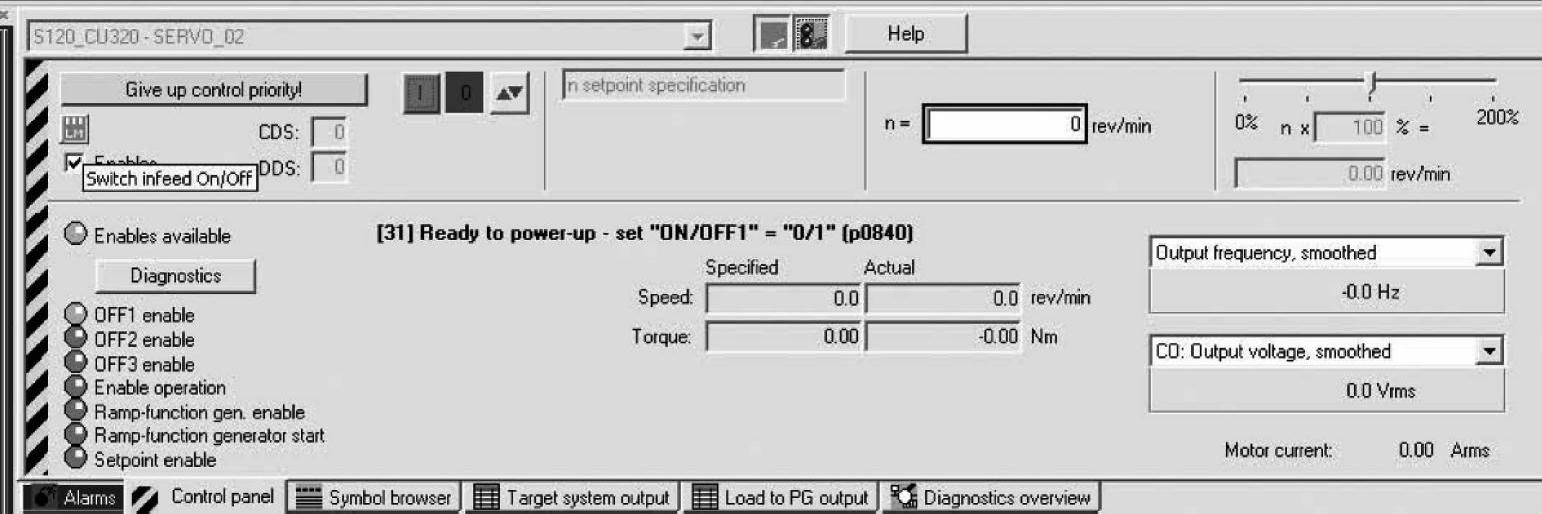
图4-45 通过软件的操作面板来控制电动机
注意,如果采用ALM、BLM或者是16kW以上(包含16kW)的SLM模块,在使能驱动之前,要先激活整流单元infeed模块。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。