




图3-19 SVG自励单变量控制仿真模型
建立了基于PSIM的SVG电路仿真模型,如图3-19所示。仿真系统参数:SVG额定容量±100kvar,交流电网额定线电压380V/50Hz,串联电感1mH,直流电容2200μF,损耗等效串联电阻0.0628Ω,三相三线两电平VSC结构,SPWM调制方式,即kc=6/4,单一控制角调节,调制深度恒为0.95,开关频率4950Hz。由式(3-40)可得无功功率对控制角的传递函数:

按照上节所述的降阶处理方法(校正方法一),上述传递函数可以简化为
因此,由式(3-41)和式(3-42)得到的调节器参数为τ=0.00265,K=2.17×10-8。校正之后无功功率控制系统的开环传递函数如下式所示,图3-20a给出了仿真结果和校正后开环系统的伯德图。

从仿真结果可以看出,系统响应速度较慢。如果对传递函数不作降阶处理,则本例的传递函数可以分解为

显然,传递函数中包含一个惯性环节和一个二阶振荡环节。仍采用PI校正规律,则无功功率控制系统的开环传递函数为
 (https://www.xing528.com)
(https://www.xing528.com)
若把PI调节器的零点设置在惯性环节的转折频率处,使系统的微分零点与积分极点相抵消,即
τ=1/38.2=0.0262
此时,系统的开环幅频特性曲线将以-20dB/dec的斜率下降,直到二阶振荡环节的转折频率处(即501.5rad/s),然后以-60dB/dec的斜率下降。要使系统稳定,系统幅频特性必须以-20dB/dec的斜率穿越零分贝线,为了保证有足够的相角裕度,穿越频率可取为二阶振荡环节转折频率的十分之一:
ωc=ωn/10=50.15rad/s
于是,由下式

可得PI调节器的比例系数为:K=5.9×10-7。图3-20b为重新校正之后(校正方法二)的无功功率控制系统的仿真结果和开环系统伯德图。比较两图可以看出,重新校正之后的系统具有更高的穿越频率和更快的响应速度。校正之后无功功率控制系统的开环传递函数如下式所示。

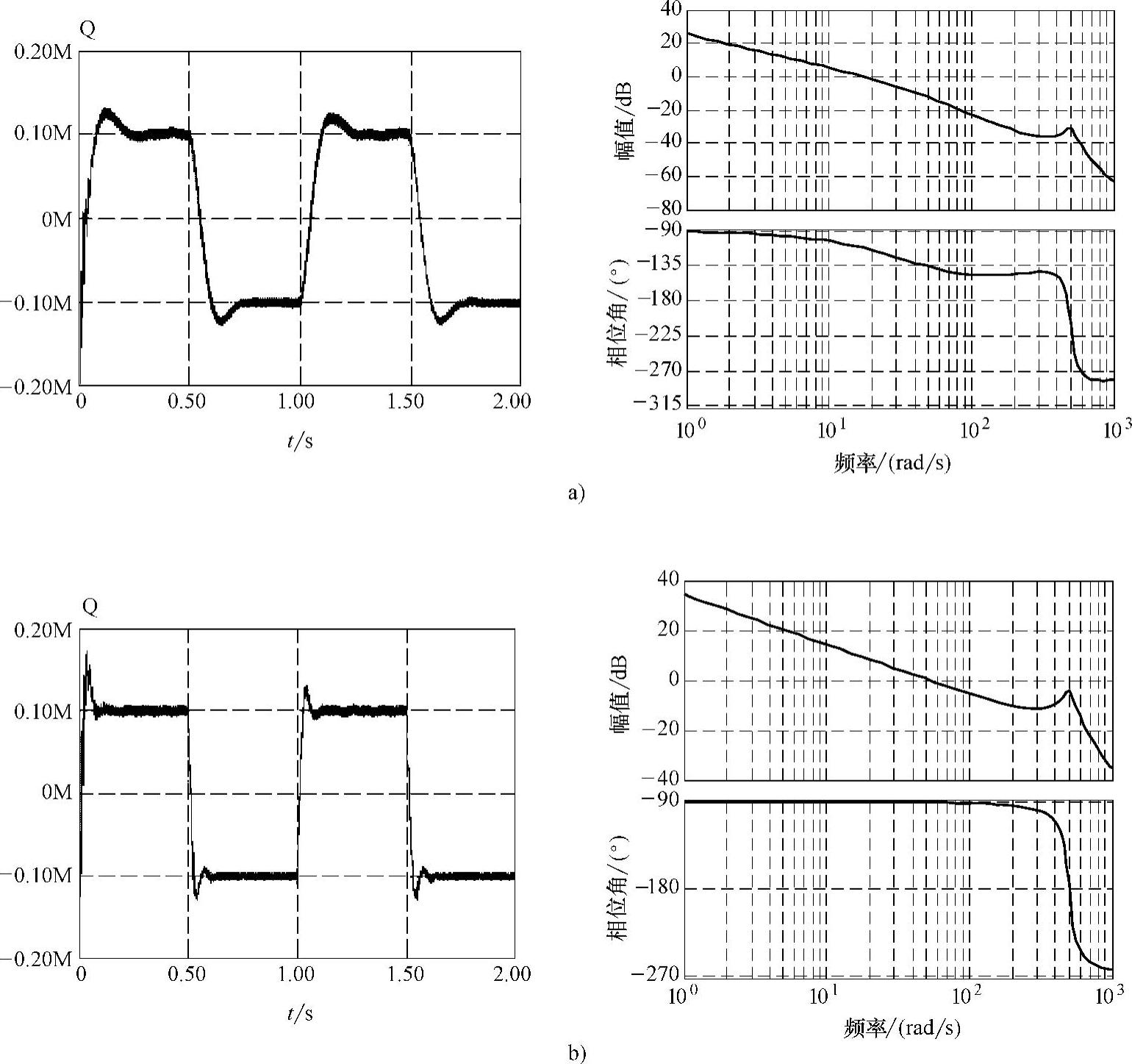
图3-20 SVG自励单变量控制系统仿真结果及开环系统伯德图
a)校正方法一(τ=0.00265,K=2.17×10-8) b)校正方法二(τ=0.0262,K=5.9×10-7)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。