



1.OB1中的程序
水节介绍控制图5-8中专用钻床的梯形图设计方法。项目名称为“钻床控制”(见随书光盘巾的同名例程),CPU为CPU 315-2DP。程序中变量的符号见图5-21巾的符号表。
图5-21 符号表
OB1中的程序见图5-22,符号名为“自动开关”的I2.0为1状态时调用自动程序FC1,为0状态时调用手动程序FC2。在手动方式时,将各步对应的存储器位(M0.0-M1.1)复位,然后将初始步MO.O置位。上述操作主要是防止由自动方式切换到手动方式,然后又返回自动方式时,可能会出现同时有两个活动步的异常情况。
图5-22 OB1中的程序
2.初始化程序与手动程序
在初始化组织块OB100中(见图5-23),将所有步对应的M0.0~M1.1复位为0状态,然后将初始步对应的M0.0置位为1状态。
图5-23 OB100中的程序
图5-24是FC2中的手动程序,为了节约篇幅,删除了各程序段的标题。在手动方式,用8个手动按钮分别独立操作大、小钻头的升降、工件的旋转和夹紧、松开。每对相反操作的输出位用对方的常闭触点实现互锁,用限位开关的常闭触点对钻头的升、降限位。
3.自动程序
钻床控制的顺序功能图重画在图5-25中,图5-26是用置位复位指令编制的顺序控制程序。图5-27是自动程序FC1中用代表步的存储器位M控制各输出位Q和C0的输出电路。
图5-24 FC2中的手动程序

图5-25 专用钻床控制系统的顺序功能图
顺序功能图中分别由M0.2~M0.4和M0.5~M0.7组成的两个单序列是并行工作的,设计梯形图时应保证这两个序列同时开始工作和同时结束,即两个序列的第一步M0.2和M0.5应同时变为活动步,两个序列的最后一步M0.4和M0.7应同时变为不活动步。
并行序列的分支的处理是很简单的,在图5-25中,当步M0.1是活动步,并且转换条件I0.1为1状态时,步M0.2和M0.5同时变为活动步,两个序列开始同时工作。在梯形图中,用M0.1和I0.1的常开触点组成的串联电路,来控制对M0.2和M0.5的同时置位,以及对前级步M0.1的复位。
另一种情况是当步M1.0为活动步,并且在I0.6的上升沿时,步M0.2和M0.5也应同时变为活动步,两个序列同时开始工作。在梯形图中,用M1.0的常开触点和I0.6的上升沿检测指令组成的串联电路,来控制对M0.2和M0.5的同时置位,以及对前级步M1.0的复位。(https://www.xing528.com)
图5-25的并行序列合并处的转换有两个前级步M0.4和M0.7,根据转换实现的基本规则,当它们均为活动步并且转换条件满足时,将实现并行序列的合并。未钻完3对孔时,减计数器C0的当前值非0,其常开触点闭合,转换条件C0满足,将转换到步M1.0。在梯形图中,用M0.4、M0.7和C0的常开触点组成的串联电路将M1.0置位,使后续步M1.0变为活动步;同时用R指令将M0.4和M0.7复位,使前级步M0.4和M0.7变为不活动步。
钻完3对孔时,C0的当前值减至0,其常闭触点闭合,转换条件  满足,将转换到步M1.1。在梯形图中,用M0.4、M0.7的常开触点和C0的常闭触点组成的串联电路将M1.1置位,使后续步M1.1变为活动步;同时用R指令将M0.4和M0.7复位,使前级步M0.4和M0.7变为不活动步。
满足,将转换到步M1.1。在梯形图中,用M0.4、M0.7的常开触点和C0的常闭触点组成的串联电路将M1.1置位,使后续步M1.1变为活动步;同时用R指令将M0.4和M0.7复位,使前级步M0.4和M0.7变为不活动步。
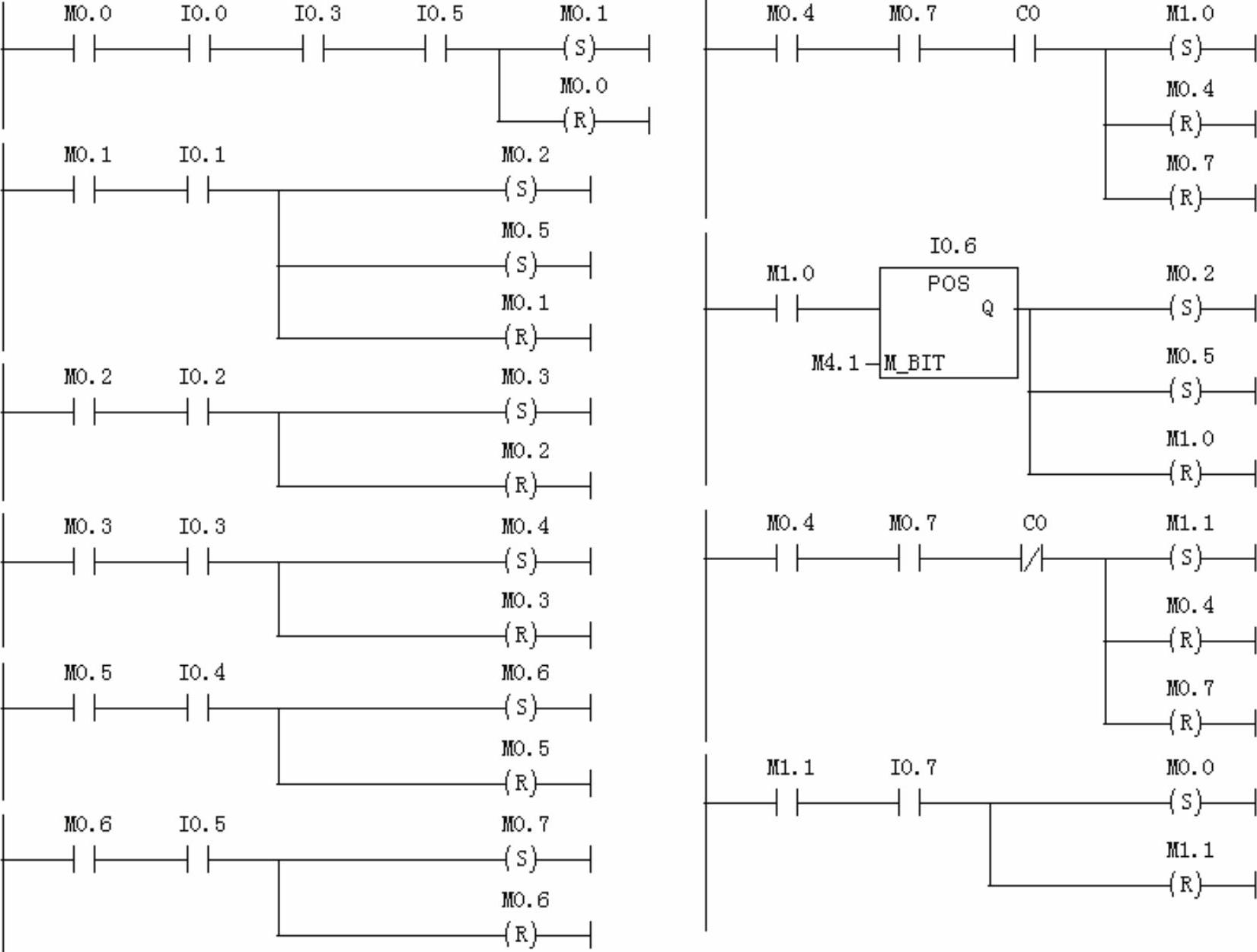
图5-26 FC1中的顺序控制程序
4.双线圈的处理
自动程序和手动程序都需要控制PLC的输出Q,因此同一个过程映像输出位的线圈可能会出现两次,称为双线圈现象。一般情况不允许出现双线圈现象。像图5-22这样用相反的条件调用自动程序FC1和手动程序FC2时,允许同一个输出位的线圈在这两个FC中分别出现一次。因为它们的调用条件相反,在一个扫描周期内只会调用其中的一个FC,而逻辑块中的指令只是在它被调用时才执行,没有调用时则不执行。因此实际上每次扫描循环只处理同一个过程映像输出位的两个线圈中的一个。
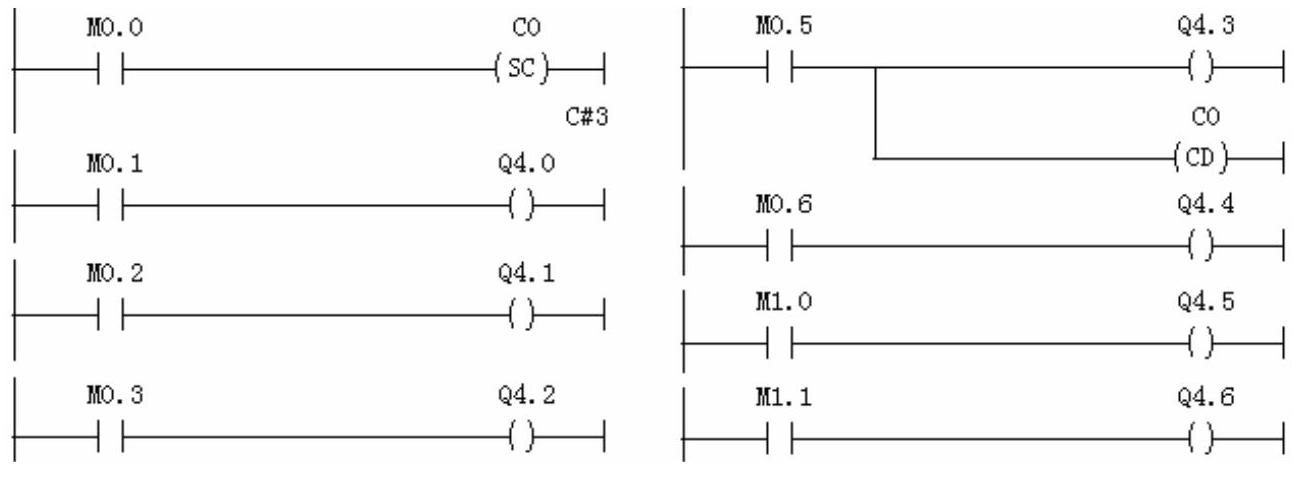
图5-27 FC 1中的输出电路
5.调试手动程序
打开PLCSIM,生成与调试有关的视图对象(见图5-28)。将各逻辑块下载到仿真PLC,将仿真PLC切换到RUN-P模式。由于执行了OB100中的程序,初始步对应的M0.0为1状态,其余各步对应的存储器位为0状态。
令I2.0为0状态,CPU调用手动程序FC2,根据图5-24调试手动程序。手动程序采用点动控制,分别令各手动控制按钮I1.0~II.7为1状态,观察对应的输出点是否为1状态。对大、小钻头作升、降控制时,观察对应的限位开关是否起作用。
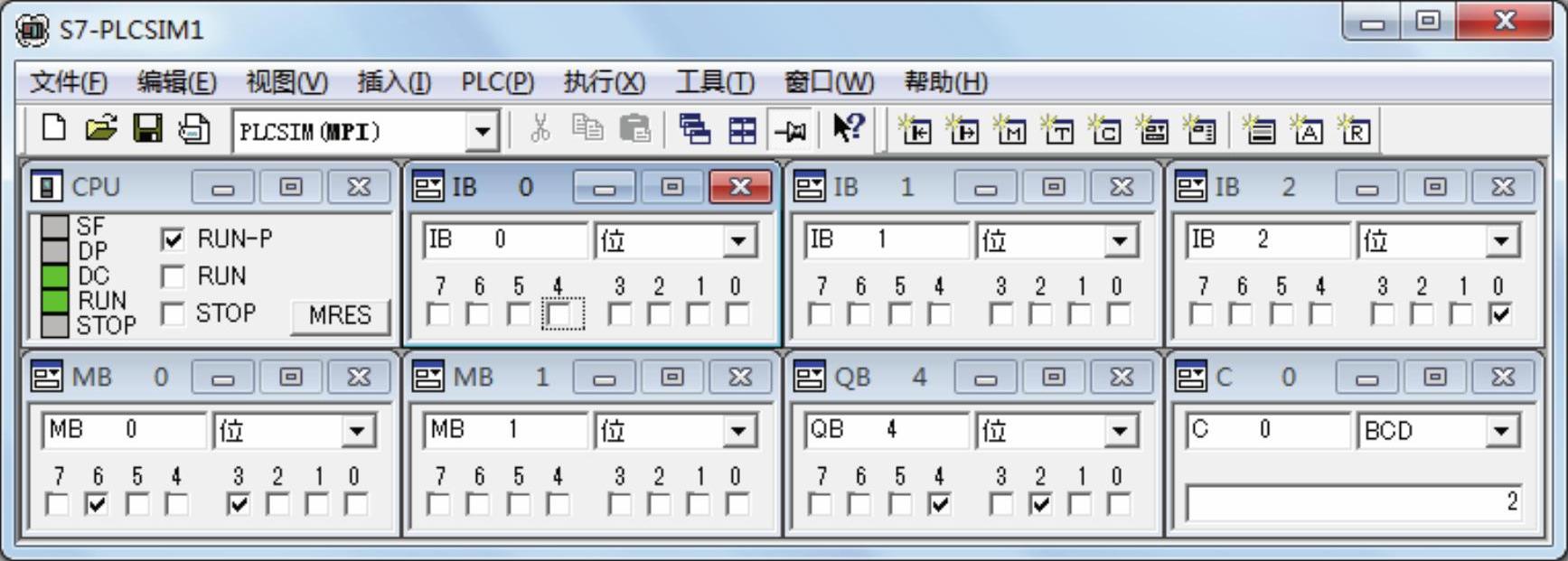
图5-28 PLCSIM
6.调试自动程序
调试时特别要注意并行序列中各子序列的第1步(图5-25中的步M0.2和步M0.5)是否同时变为活动步,最后一步(步M0.4和步M0.7)是否同时变为不活动步。经过3次循环后,是否能进入步M1.1,最后返回初始步。发现问题后应及时修改程序,直到每一条进展路线上步的活动状态的顺序变化和输出点的变化都符合顺序功能图的规定。
令I2.0为1状态,CPU调用自动程序FC1。根据顺序功能图调试自动程序。进入自动程序时,仅初始步对应的M0.0为1状态。单击PLCSIM中I0.3和I0.5对应的小方框,模拟大、小钻头均在上限位置。单击两次I0.0对应的小方框,模拟按下和放开起动按钮。初始步下面的转换条件满足,M0.0变为0状态,M0.1和Q4.0变为1状态,说明转换到了夹紧步。令I0.1为1状态,转换到步M0.2和步M0.5,C0的当前值减1后变为2。钻头开始下降后,应将上限位开关I0.2和I0.4复位为0状态。
按照顺序功能图,依次令当前的活动步后面的转换条件为1状态,观察是否能转换到后续步。大小钻头均上升到位时,观察是否能转换到旋转步M1.0,旋转到位时是否能返回步M0.2和步M0.5。钻完3对孔后,观察是否能转换到步M1.1,I0.7为1状态时是否能返回初始步。
在调试时应注意在工件旋转期间,上限位开关I0.3和I0.5应为1状态,在钻孔期间,旋转到位开关I0.6应为1状态。
在任意的步为活动步时切换到手动方式(令I2.0为0状态),当前的活动步对应的存储器位(M)和输出点应变为0状态,初始步对应的M0.0应变为1状态。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。