



HD型液压控制是德国Rexroth公司生产的A6VM型液压马达的一种与液控先导压力相关的液压控制方式,马达的排量随液控先导压力信号无级变化,主要适用于行走或固定的机械设备。
图5-1所示为HD型液压控制原理图,液压马达起始排量为最大排量,液压马达的排量随着X口先导控制压力的变化可在最大和最小之间无级变化,改变先导压力的大小就可实现马达的排量的控制。其原理为:当向液压马达的A、B工作油口的任一个提供压力油时,压力油都能通过单向阀2或3进入变量缸7的有杆腔,变量缸7有杆腔常通高压。当X口先导控制压力升高时,先导控制压力油作用在先导压力控制伺服阀1的阀芯上的力将克服调压弹簧4和反馈弹簧5的合力,推动先导压力控制伺服阀阀芯向右移动,当先导控制压力升高至液压马达变量起始压力时,伺服阀1将处于中位。如果先导控制压力继续升高,伺服阀阀芯将进一步右移,伺服阀1处于左位机能,液压马达工作压力油经伺服阀1进入变量缸无杆腔。由于变量缸7活塞两端面积不相等,当两端都受压力油作用时,变量缸活塞将向左运动,固定在变量缸活塞上的反馈杆6将带动配流盘及缸体摆动,使缸体与主轴之间的夹角减小,从而使液压马达排量减小。同时,反馈杆6压缩反馈弹簧5,迫使伺服阀1的阀芯向左移动直到伺服阀1回到中位,变量缸无杆腔的油道被封闭,液压马达停止变量,将处于一个与先导控制压力相对应的排量位置。HD型液压控制属于位移-力反馈控制,利用变量活塞的位移,通过弹簧反馈使控制阀芯在力平衡条件下关闭阀口,从而使变量活塞定位。
当X口的控制压力降低时,伺服阀阀芯上的力平衡被打破,弹簧力大于液压力,伺服阀1将由中位机能变为右位机能,变量缸无杆腔变为低压,在有杆腔压力油的作用下,变量缸活塞将向右运动,固定在变量缸活塞上的反馈杆6将带动配流盘及缸体摆动,使缸体与主轴之间的夹角增大,从而使液压马达排量增大。同时,由于反馈杆6随变量活塞向右移动,反馈弹簧5压缩量将减少,反馈弹簧作用在伺服阀1阀芯上的力将减小,伺服阀阀芯向右移动直到伺服阀1处于中位(在图5-1中未画出),变量缸7大腔的油道被封闭,液压马达停止变量。综上所述,当先导控制压力在变量起始压力和变量终止压力之间变化时,液压马达排量将在最大和最小之间相应变化。
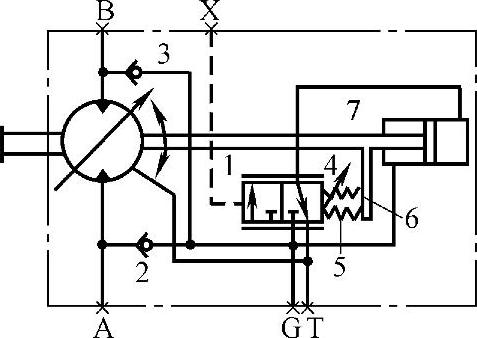
图5-1 HD型液压控制原理图
1—伺服阀 2、3—单向阀 4—调压弹簧 5—反馈弹簧 6—反馈杆 7—变量缸
作为液压马达来讲,排量减小时转速升高,压力增高。这个特性和泵正好相反。HD型液压控制方式有两种标准结构形式:
1)控制起点在最大排量Vgmax位置,此时马达输出最大转矩和最低转速。
2)控制起点在最小排量Vgmin位置,此时马达输出最小转矩和最高转速。(https://www.xing528.com)
有两种方案供选用:
1)HD1——控制范围从排量最大(Vgmax)到排量最小(Vgmin)时,先导压差Δpst=1MPa,控制起点在0.2~2MPa内可调。标准设定值的控制起点压力为0.3MPa,控制终点压力为1.3MPa,最大的可允许先导压力为10MPa,如图5-2所示。
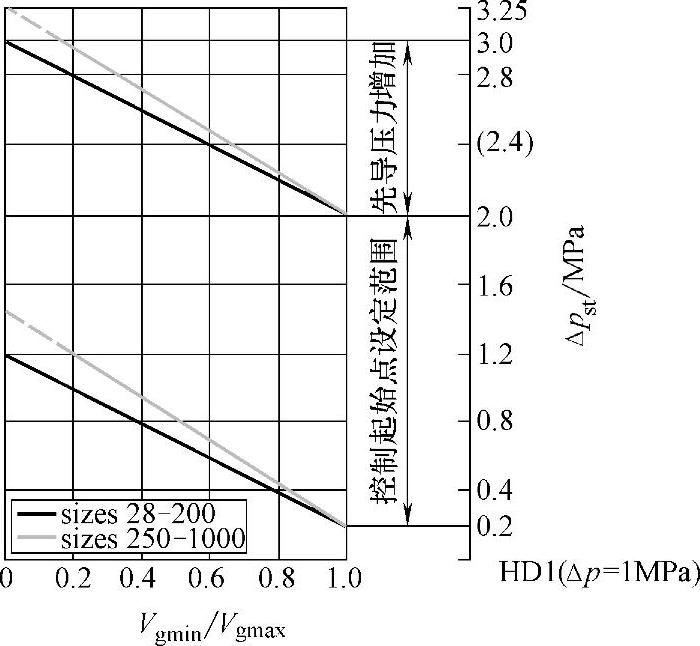
图5-2 HD型液压控制特性曲线
2)HD2——控制范围从排量最大到排量最小(Vgmax~Vgmin)时,先导压差Δpst=2.5MPa,控制起点在0.5~5MPa内可调。标准设定值的控制起点压力为1MPa,控制终点压力为3.5MPa。
当用HD型液压控制方式进行双速控制时,最高先导压力可达7.5MPa。
因为所需要的控制油取自于高压腔,因此,要使变量控制能够实现,至少需要相对于供油压力的压差Δp=1.5MPa,当工作压力<1.5MPa时,必须在G口通过外界单向阀供入1.5MPa以上的辅助压力。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。