



人机工程学指出工程技术设计应适应人体的各种要求,以使人机系统工作效能达到最高限度,给操作人员提供不易造成疲劳、避免或减少误差的良好工作条件。所以调节机构的设计应符合人机工程学原理。
1)调节器的安装位置。调节器应处于人手活动最灵敏、反应最快、用力最合适和辨别力最好的位置。
调节器一般应该设在以肩为圆心,半径为610mm的球形区域内;若允许躯干运动,则球形区域半径可达760mm。
最常用的调节器应设在以肘为圆心,半径为360mm的圆球区域内;若允许肘运动,则圆球区域的半径可达400mm。
当有多个调节器时,它们的排列位置对操作者的影响是:纵向排列比横向排列容易分辨;排列于右侧比排列于左侧容易分辨。
2)调节器的大小。调节器的大小必须使操作者感到方便和舒适。
操作时若需要转若干圈的摇把,其旋转半径以20~50mm为宜;若要快速转动,其旋转半径应为30mm左右;若需把仪表指针调到指定的刻度上,旋转半径为35mm最佳。
3)手轮半径与载荷力矩的关系。手轮或旋钮调节的均匀性和平稳性,主要取决于其半径和负载力矩的大小。
手轮上的总负载力矩等于摩擦力矩与驱动系统按相应的加速度运动所需的力矩之和,即
M=MT+Jε
式中 M——手轮上的总负载力矩(N·m);
MT——系统折算到手轮轴上的摩擦力矩(N·m);
J——系统折算到手轮轴上的转动惯量(kg·m2);
ε——转动手轮的角加速度(rad/s2)。
一般来说,半径为125~200mm的手轮,载荷力矩为2.3~4.6N·m;半径为20mm的有棱边的旋钮,适宜的载荷力矩为0.52N·m,最大不超过1N·m。半径为12.5~25mm的旋钮,其调节力不宜超过0.25N·m。
在一定载荷力矩作用下的手轮,其半径的较佳值可按图4-6选择。
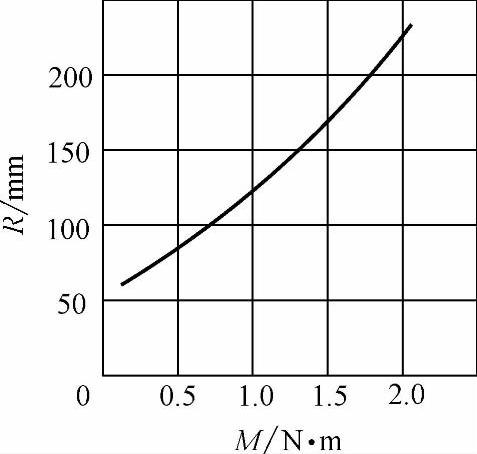
图4-6 载荷力矩与手轮(旋钮)半径的关系
调节机构的调节器,其操纵力一般应尽可能小。但是用力太小时操作人员不易从操作中感受到控制量大小的反馈信息,不易控制其调节的精确度。所以,调节精度要求较高的调节器,应具有一定的调节阻尼力。比如,对于调节仪表指针到指定位置的手轮,当其直径为100mm时,宜有130N左右的阻尼力;直径较小的跟踪操纵手轮,宜有2N左右的阻尼力。当然,对于只要求快速调节而调节精度要求不高的手轮,其操纵力则越小越好。对直径较大的手轮,其操纵力可能很小,操作者可从动作幅度的大小来取得控制量大小的反馈信息。
4)手轮转速与功率的关系。当手轮转速从零变到人所能及的最大值时,人所发挥出的有效功率则从零增大到某一个最大值后,再减小到零。其变化规律遵循如下表达式
 (https://www.xing528.com)
(https://www.xing528.com)
式中 P——人给予系统的功率(N·m/s);
Pmax——人给予系统的最大功率(N·m/s);
ω——手轮的转速(rad/s);
ωmax——手轮的最大转速(rad/s)。
可见,欲使P=Pmax,则应该要求
即 (2ω-ωmax)2=0
所以 ω=ωmax/2
可见,当手轮的转速等于最大转速的一半时,手发挥的功率最大。一般来说,人操纵手轮所能发挥的最大功率平均不超过100~150N·m/s。转动手轮的最大转速不超过3~4r/s,即(6~8)πrad/s,或近似为18~24rad/s。
[例4-3]假定某系统,人操纵手轮的最大转速为ωmax=12rad/s,人给予系统的最大功率为Pmax=80N·m/s。于是可以在ω所允许范围内取适当的值,代入式(4-1)计算出相应的P值,按此函数关系可作出如图4-7所示的曲线,可知手轮的转速为6rad/s(即ωmax/2)时可发挥最大功率。
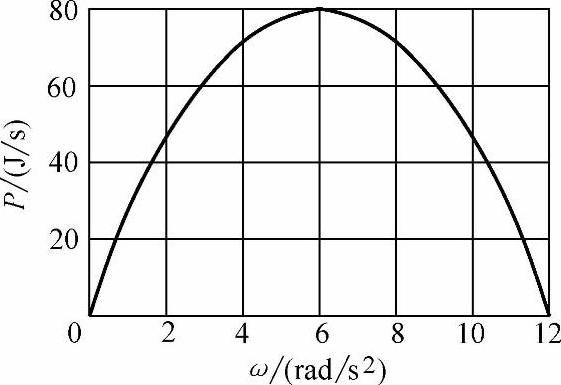
图4-7手 轮转速与人发挥的功率的关系
5)手轮转速与载荷力矩的关系。把式(4-1)两边都除以ω便得手轮转速与所能克服的载荷力矩M的关系式,即
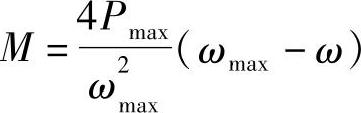
或 
按人的操作能力,对最大转速和最大功率可取如下极限值:ωmax=24rad/s,Pmax=150N·m/s,代入式(4-2),则有
ω≈24-M (4-3)
式(4-3)就是在人操纵手轮可能达到的最大转速和所能发挥出的最大功率的条件下,导出的手轮转速ω与所能克服的系统载荷力矩M的关系式。如果已知系统折算到手轮的载荷力矩M,则可用式(4-3)求得手轮的合适转速ω。
但是,手轮的负载力矩有一定的范围,不能超过人体力所能及的极限值,要使式(4-3)有意义,必须有M<24N·m。也就是说,系统折算到手轮的载荷力矩,最大不能超过24N·m。这是设计手控调节机构的力学原则。
综上所述,要根据调节对象的性质、调节参数、量程范围、精度要求和指示方式等来设计调节机构,正确地选择指示器和调节器之间的传递比D/R和转值A的大小。同时,要根据人体功能要求,合理地确定操作位置、转动速度和载荷力矩。这样才能获得较优的机构设计和理想的调节效果。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。