



【摘要】:所以这种机构又称为平方-除法机构。它与图6-15所示的乘法机构的区别是,摩擦盘1兼作锥齿轮,并与锥齿轮5啮合带动螺杆4来自动调节钢球与摩擦盘接触的位置y。所以得令则有 α2=kα21图6-17 摩擦盘式平方机构1—摩擦盘兼锥齿轮 2—辊轴 3—钢球 4—螺杆 5—锥齿轮由上式可知,只要已知摩擦盘1的转角α1,则辊轴2的输出转角α2与α1的平方成比例,所以这种机构可作平方运算。
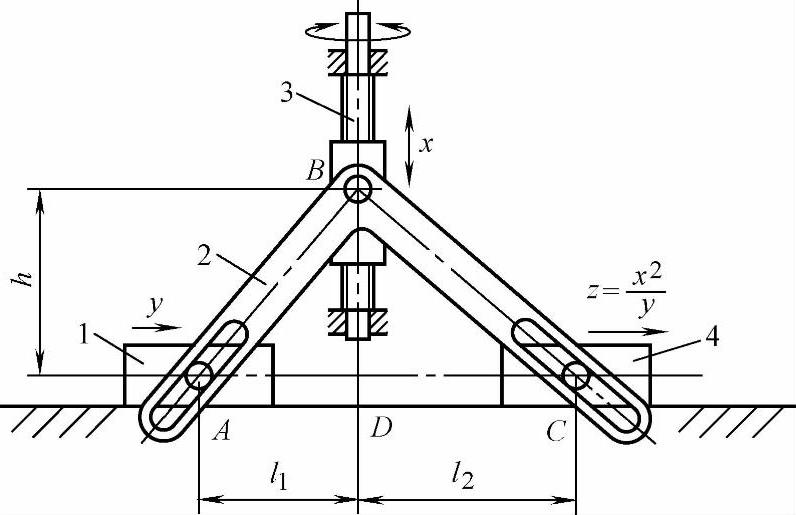
图6-16 杠杆式平方机构
1、4—滑块 2—槽板式杠杆 3—螺杆
把图6-13所示的倒数机构作适当的改变,便有如图6-16所示的杠杆式平方机构。
槽板式杠杆2可由螺杆3的输入量x来改变其距离h。滑块4的输出量z与输入量x成平方关系,而与滑块1的输入量y成倒数关系。所以这种机构又称为平方-除法机构。
由相似三角形△ABD和△BCD可得
因h和l1与输入量x和y成比例,l2与输出量z成比例,所以得
这种机构与倒数机构不同的是有两个输入量x和y。而倒数机构则只考虑一个输入量y,其余均为结构常数。
2.摩擦盘式平方机构
图6-17所示是摩擦盘式平方机构。它与图6-15所示的乘法机构的区别是,摩擦盘1兼作锥齿轮,并与锥齿轮5啮合带动螺杆4来自动调节钢球与摩擦盘接触的位置y。
摩擦盘1输入转角α1与辊轴2的相应输出转角α2应有如下关系:(https://www.xing528.com)
α1y=α2r或
而 
式中z1和z5——分别为锥齿轮1和5的齿数;
P——螺杆4的螺距。
所以得

令 
则有 α2=kα21

图6-17 摩擦盘式平方机构
1—摩擦盘兼锥齿轮 2—辊轴 3—钢球 4—螺杆 5—锥齿轮
由上式可知,只要已知摩擦盘1的转角α1,则辊轴2的输出转角α2与α1的平方成比例,所以这种机构可作平方运算。但是,这种机构的运算受到螺杆4的有效长度的限制,所以输入转角α1应限定在一定的工作范围内。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。