



前文已经提到,异步电动机直接起动时起动电流是额定电流的4~7倍。起动转矩却只有0.9~1.3倍。绕线转子异步电动机通过在转子回路串入附加的起动电阻形成良好的起动特性。随着电动机加速(转差率减小),还应当逐步减小起动电阻值,直至附加的电阻值达到零。
笼型异步电动机的转子回路已经在内部短接,不可能再串入附加的起动电阻。为了减小起动电流,得到高起动转矩的笼型异步电动机,通常把转子做成深槽性或者做成双笼型,增大起动时的转子电阻。而在正常工作时,转子电阻变小,减少损耗。
利用交流电流在导体中的趋肤效应,就可以得到这样的效果。趋肤效应的原理是电磁感应定律,即交流电流在通过导体时因为自感的作用而产生感应电动势。感应电动势eL的方向与电流方向相反,其值为

这个电动势的值与电流、频率和电感量有关。而电感量又同导体周围的导磁环境有关。如果导体处于磁导率很低的空气中,导体的电感量L和感应电动势都很小,阻碍电流的能力也很小。如果导体放置在高磁导率的材料中,电感量L和感应电动势都会成倍增大,增强了阻碍电流的能力。
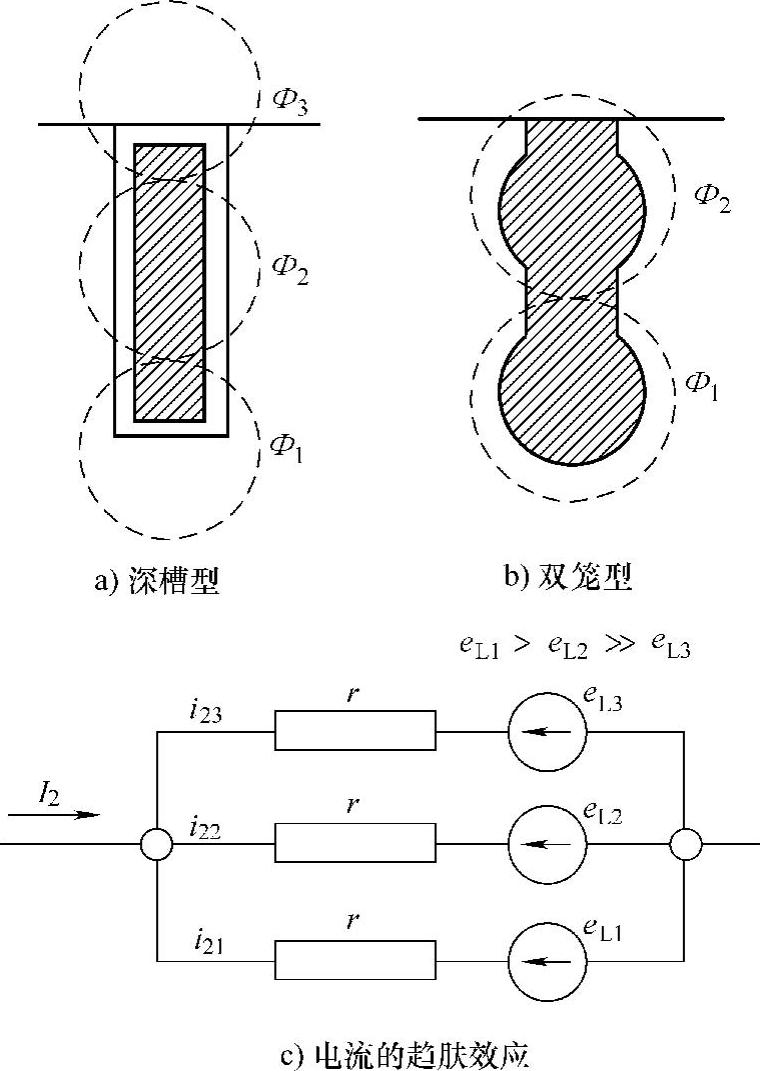
深槽鼠笼转子的沟槽深而窄,通常深宽比达到10~12倍。为了考查深槽笼型转子自感电动势对于增大转子回路电阻的作用,图3-9a所示为深槽转子的横截面图,把转子槽中导体按深度分为并联的三部分。当电流流过槽内最深处的导体部分,产生的磁通为Φ1。Φ1的磁力线沿着高磁导率的硅钢片形成闭合回路,感应的电动势eL1很大。因感应电动势的方向和电流i21相反,阻碍电流的效果十分明显。
当电流i23流过槽内最浅处的导体部分,产生的磁通为Φ3。Φ3的磁力线很长一段通过低磁导率的空气形成闭合回路。所以Φ3的值要比Φ1小得多,感应电动势eL3也比eL1小得多,阻碍电流的能力很小。
因此,随着导体在槽内的深度不同,导体中的感应电动势的分布情况也有所不同。越靠近槽的下部,电感量和感应电动势越大,阻碍电流的能力越强。由于自感电动势与电流频率(即转差频率)有关,所以r2和x2都是转差率的函数。
由于转子导体的三个部分相当于并联(见图3-9c),转子电流I2被排挤到上部。这种现象被称为槽内导体的电流趋肤效应。当转子电流频率接近50Hz时,这种趋肤效应很明显。这时导体中流过电流的有效面积只是导体总面积的几分之一,所以,相当于增加了转子导体的电阻r2。而当转子电流频率很低时(5Hz以下),这种趋肤效应不明显。
 (https://www.xing528.com)
(https://www.xing528.com)
图3-9 高起动转矩的笼型异步电动机
当电动机起动时,转差率很大(s=1),转子电流的频率接近50Hz,转子电阻r2很大,相当于在转子回路串入了附加电阻。随着电动机转速逐渐升高,转差率逐渐变小。转子电流的频率也变小,电流的趋肤效应也变弱。电流逐渐向转子导体的深层扩展,相当于r2逐渐减小。当转速达到工作转速时,转子电流的频率相当低,趋肤效应不明显。转子电流流过导体的全部截面,相当于r2最小。由于深槽型转子的电阻r2可以随着转速自动改变,这种笼型异步电动机的起动特性毫不逊色于绕线转子异步电动机转子串电阻的起动特性。起动电流为额定值的5~6倍,起动转矩为额定值的1.1~1.3倍。
受到深槽转子的启示,可以通过改变笼型转子的结构进一步改善起动性能。还可以通过改变笼型导体的材料增大转子电阻。双笼型就是最典型的结构——在转子中嵌入两套鼠笼,浅部的叫做上笼,深部的叫做下笼(见图3-9b)。上笼可以用电阻率较大的合金材料制成,电阻较大,在起动时发挥作用。下笼用紫铜制成,电阻较小,在工作时发挥作用。同前面叙述的深槽转子的原理相同,在起动时转子电流主要流过上笼。在趋肤效应的作用下,转子导体的电阻增大,加之上笼本身的电阻就较大,能够产生较大的起动转矩。当转速达到正常速度后,因为下笼电阻小,电流主要流过下笼。为了减小下笼的电阻,有意把下笼的截面积做得较大,形成所谓的梨形双笼型转子结构。
常用的笼型异步电动机的机械特性曲线如图3-10所示。通用型笼型异步电动机(图3-10中特性曲线1)应用最为广泛,而且是长期连续工作在额定值附近。因此,追求高效率、低转差就是这种电动机的主要目标。在工作区段的机械特性比较硬。在转差率较大的区域,机械特性有一个不大的拐点,用最小转矩Tmin表示这点的转矩。
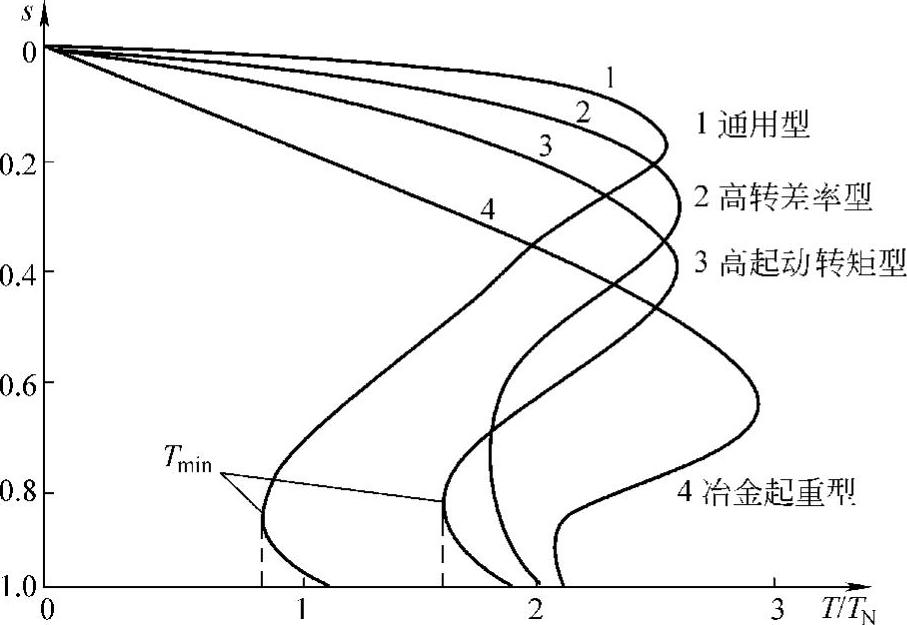
图3-10 常用的笼型异步电动机的机械特性
高转差率的笼型异步电动机(图3-10中特性曲线2)具有比较软的机械特性,多用于如下场合:多台电动机驱动一个机械轴系;周期性变化的机械负载(例如曲柄-连杆机构);利用飞轮储存的动能克服负载阻力;重复短期工作方式的机械等。
高起动转矩的笼异步电动机(图3-10中特性曲线3)是专门用于重载起动的机械,例如带式输送机械等。
冶金及起重用笼型异步电动机(图3-10中特性曲线4)适用于重复短期频繁起动的机械。这种电动机具有高起动转矩、高过载能力、高机械强度的特点。但是这种电动机的能量指标较差:效率较低,速降较大。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。