



带有速度反馈的晶闸管直流调速系统的框图如图11-8所示。由第4章的内容可知,机械特性的方程如式(11-2)所示:

式中 ω0.CL——闭环控制时的空载转速;
βCL——闭环控制时的机械特性硬度的绝对值;
Ud——电枢回路整流器的输出电压平均值。
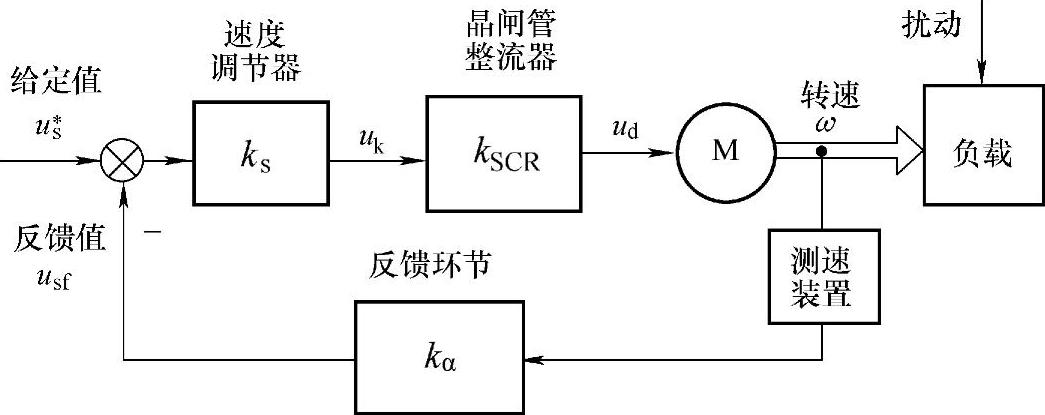
图11-8 带有速度反馈的晶闸管直流调速系统的框图
由第4章第2节可知,闭环时机械特性硬度是开环时机械特性硬度的(K+1)倍,这里的K是开环时系统的放大倍数。忽略电枢电阻时,ω≈Ud/C,则

式中 ks——速度调节器的比例系数;
kSCR=Ud/uk——晶闸管整流器的放大倍数;
uk——晶闸管整流器的控制电压;
kα=ωact/ω——速度反馈环节的反馈系数。
描述这个系统的方程如下式所示:
式中 us∗——速度给定值;
usf——速度反馈值。
由上面的公式可以得到闭环传动系统的机械特性表达式

闭环控制系统可以提高机械特性硬度的原理已经在第4章的图4-5有所描述。由式(11-5)可知,对于闭环系统而言,提高机械特性硬度的方法就是提高开环放大倍数K,实际上可以调节的手段也只有提高速度调节器的比例系数ks。
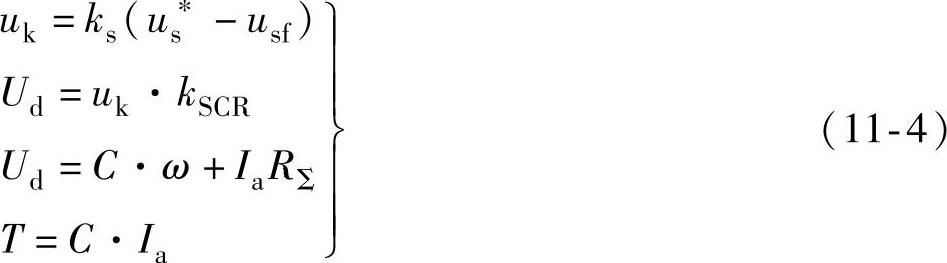
通常电动机的最大输出转矩受机械强度的限制只能达到(2~3)倍的程度,在只有速度闭环的控制系统中,采用电流截止负反馈的方案限制最大转矩,也就是把电枢电流负反馈引入到速度反馈环节。当电动机的电枢电流超过某个临界值,就要降低速度调节器的输出值,这样就降低了电枢电压和电动机的转速,达到限制最大转矩的作用。这种电流截止负反馈的控制方式功能框图如图11-9所示,相关的数学表达式见式(11-6)。
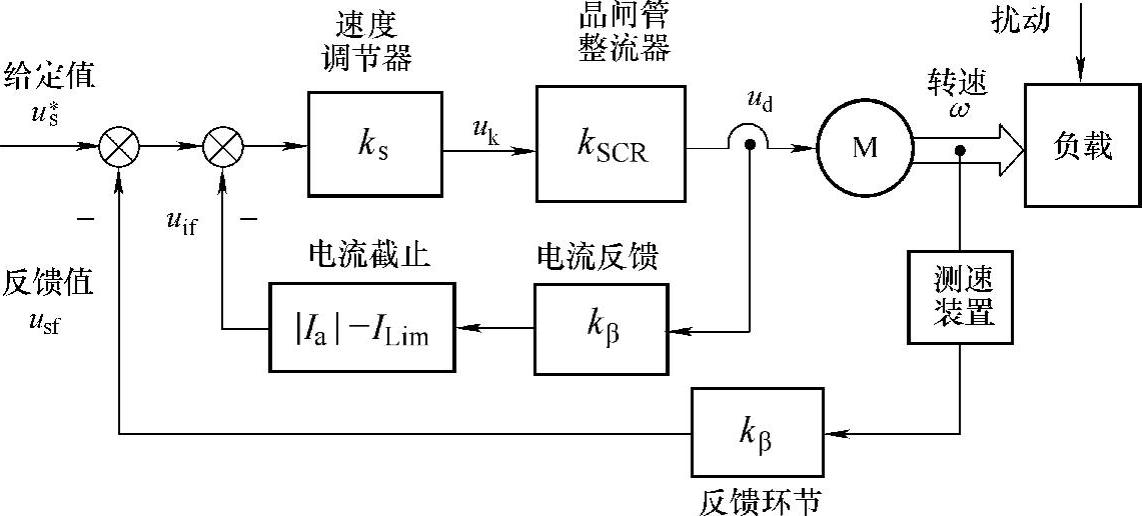
图11-9 带有电流截止负反馈的速度闭环控制系统框图
 (https://www.xing528.com)
(https://www.xing528.com)

式中 uif——电流截止反馈值;
ILim——电流截止负反馈开始投入工作的电枢电流的临界值;
kβ——电流反馈系数。
在电流反馈和速度反馈的双重作用之下,这种调速系统的机械特性如图11-10所示。由图中可以看出,机械特性由两部分组成:特性硬度很高的直线1部分——电流截止负反馈还没有起作用;转矩受到限制的斜线2部分——机械特性硬度明显变软。
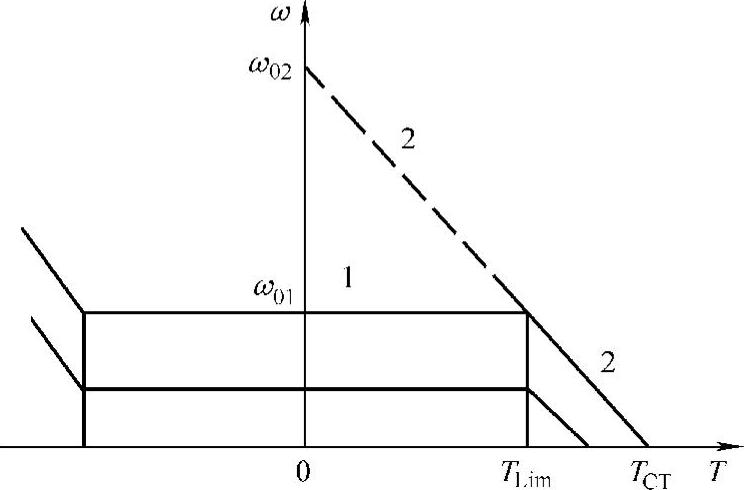
图11-10 带有电流截止负反馈速度闭环系统的机械特性
下面介绍电流截止负反馈的机械特性,晶闸管-直流电动机的基本方程为
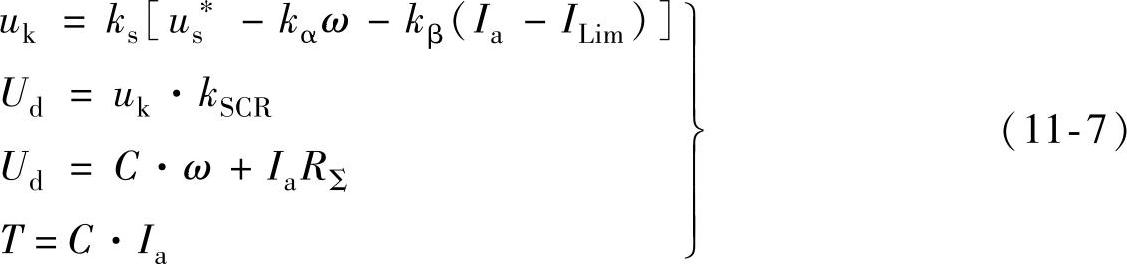
以ω为自变量来解这个方程组,当Ia≥ILim时,得到斜线2部分的机械特性

式中 ILim——指定的截止电流值,电枢电流不能超过此值;
TLim——截止电流对应的截止转矩,TLim=C·ILim。
这个方程的前两项表示第2段机械特性的空载转速ω02,即
ω02=ω01+Δω02
第3项是斜线段转速降,和机械特性的硬度有关
C2(1+K)
在闭环情况下,晶闸管整流器的输出电压不是固定的值,而是随转速和转矩变化的,即
在机械特性的第1工作区段,速度基本不变。随着电动机轴上负载的增加,Ud也增大。当过渡到第2区段时,随着负载继续增大,速度逐渐降低直至等于0,整流电压也减小至 ,电动机输出转矩为TLim。为了得到期望的机械特性,晶闸管整流器必须有足够大的电压裕量,即
,电动机输出转矩为TLim。为了得到期望的机械特性,晶闸管整流器必须有足够大的电压裕量,即

在这种情况下,在第1区段的机械特性硬度可以达到恒定值β1,在不同的负载情况下,转矩值都可以达到TLim。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。