



机器人虚拟世界,由Robomatter开发,是一个高端的模拟环境,使学生在实体机器人不可用时学习编程。虚拟世界是ROBOTC的一部分,可以将写好的程序在软件中通过虚拟机器人运行。
机器人虚拟世界在3D环境中模拟VEX EDR、VEX IQ和EV3机器人,这些机器人可以使用与实体机器人ROBOTC相同的语言进行编程。虚拟世界中有抓手机器人、巡线机器人、自动驾驶机器人等,而场地更是有果园挑战、迷宫挑战、障碍挑战等几十种场地供您选择,它能让用户体验不同机器人的不同挑战。虚拟世界环境完美解决了家庭、教室和其他环境限制条件的问题,例如在教室环境中,机器人虚拟世界可以允许每个学生测试编程概念,而不需要一个随时可用的机器人。
当使用ROBOTC时,学生可以在实体和虚拟机器人之间切换,以便在虚拟环境中快速调试和测试他们的代码,迅速体现出所写程序的内容,更方便地找出程序中的不足与误差,然后部署到实体机器人。
机器人虚拟世界允许学生利用虚拟技术在任何地方模拟机器人,在学堂外继续他们的机器人体验。教师可以应用这一点来布置正确的作业,并帮助错过课程的学生。
从虚拟世界中能更好地熟悉ROBOTC这个软件,学习不同比赛的规则,让数据更精确,从而更容易掌握VEX IQ编程语言。
(1)如果想运行虚拟世界,需要先进行激活,4.55版本的ROBOTC添加许可证后才可以使用虚拟世界,在ROBOTC软件中打开Help(帮助)菜单,选择Add License(添加许可证)命令,如图1-61所示。
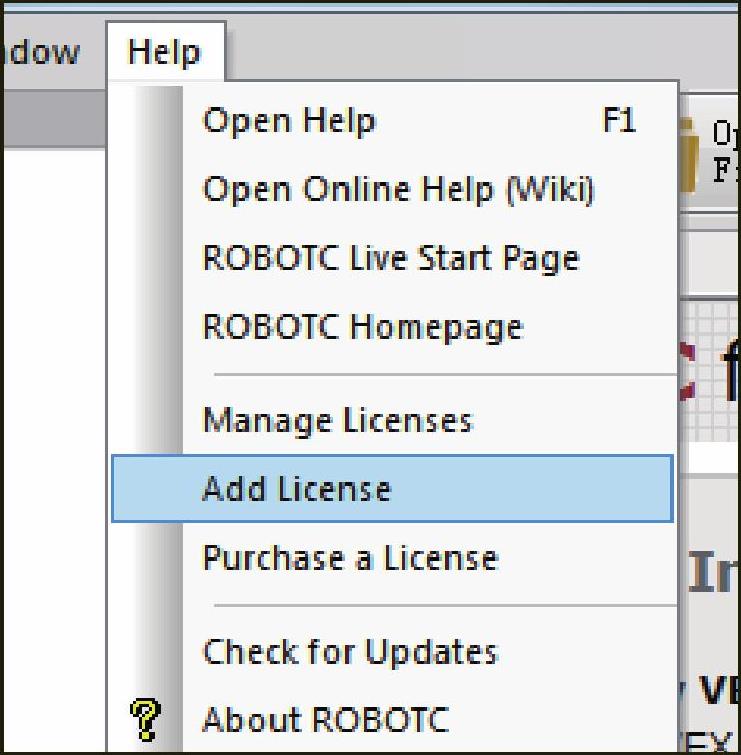
图 1-61
(2)在新窗口中进行选择,有乐高头脑风暴、乐高虚拟世界和VEX虚拟世界三个选项,在这里选择乐高虚拟世界,如图1-62所示。
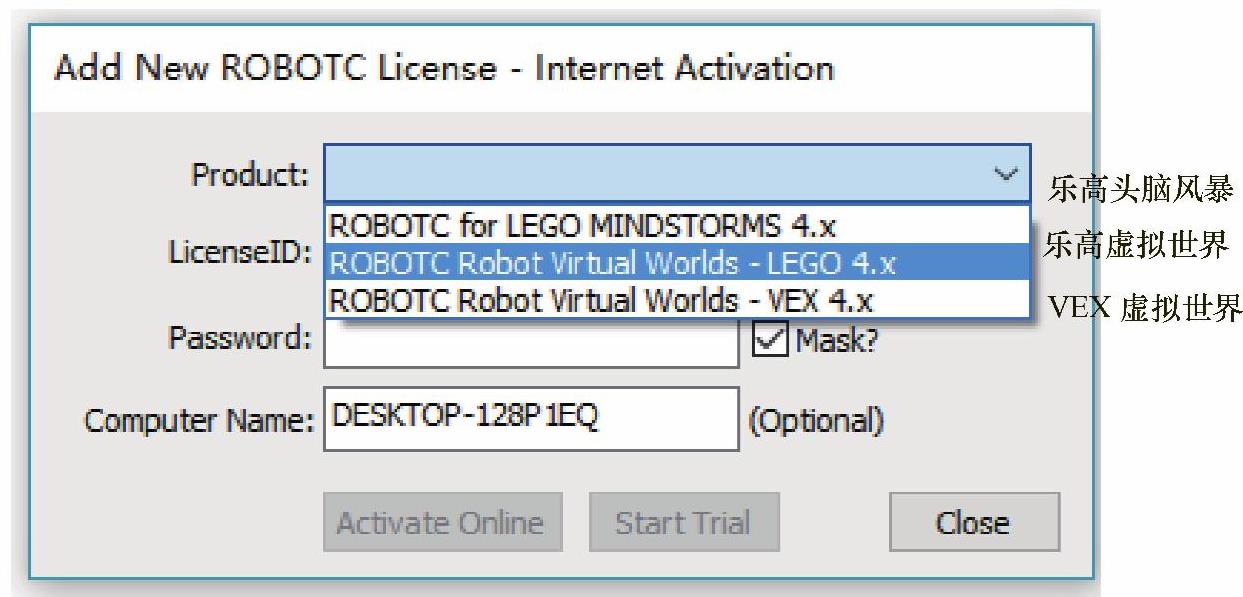
图 1-62
(3)选择乐高虚拟世界之后,在下面两行输入许可证账号与密码,然后单击Activate Online按钮进行激活。如果没有购买许可证,那么可以先单击Start Trial按钮试用10天,如图1-63所示。
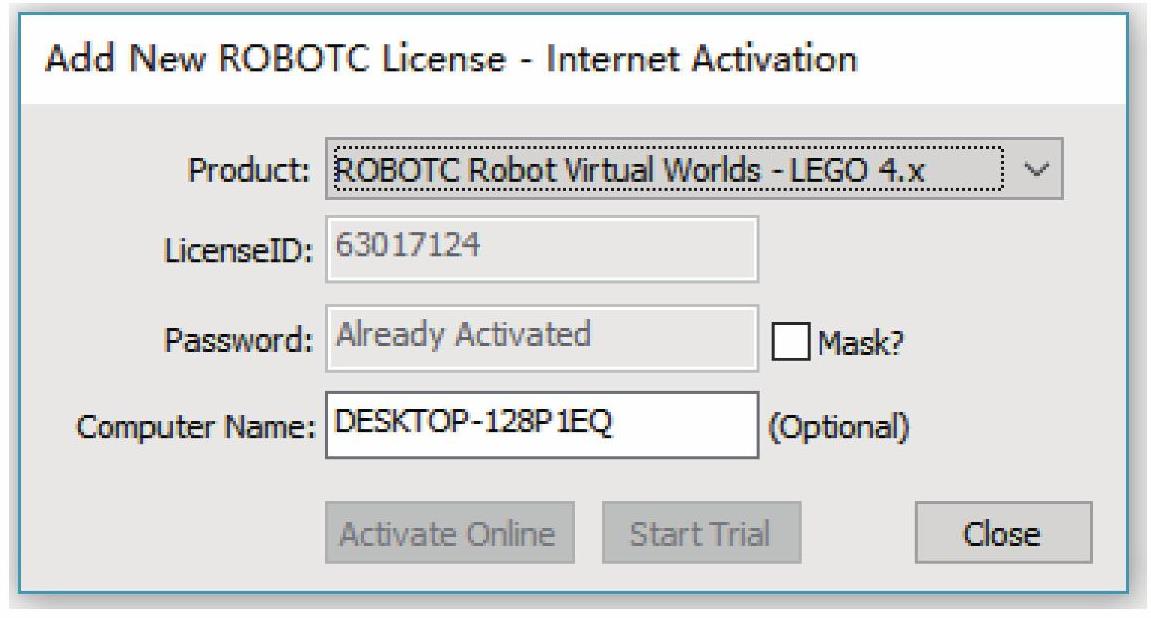
图 1-63
(4)系统会询问是否要创建一个虚拟世界桌面快捷方式,单击“是”按钮即可,如图1-64所示。
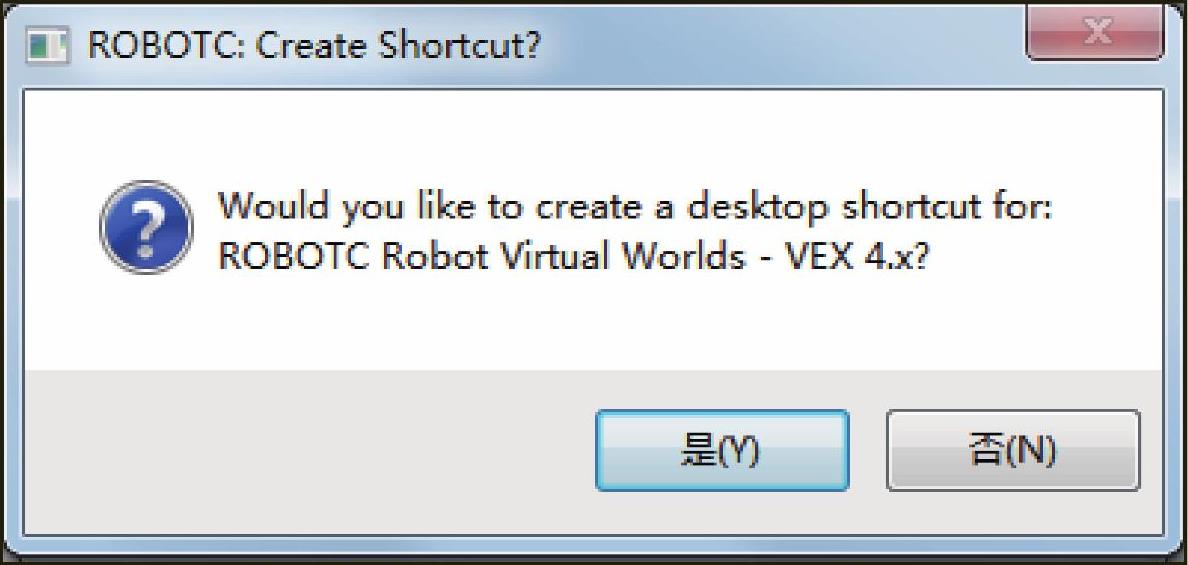
图 1-64
(5)在这里直接单击蓝色选项卡中的Log In as Guest(游客登录)即可进入虚拟世界主页面,如图1-65所示。

图 1-65
虚拟世界主页面如图1-66所示。
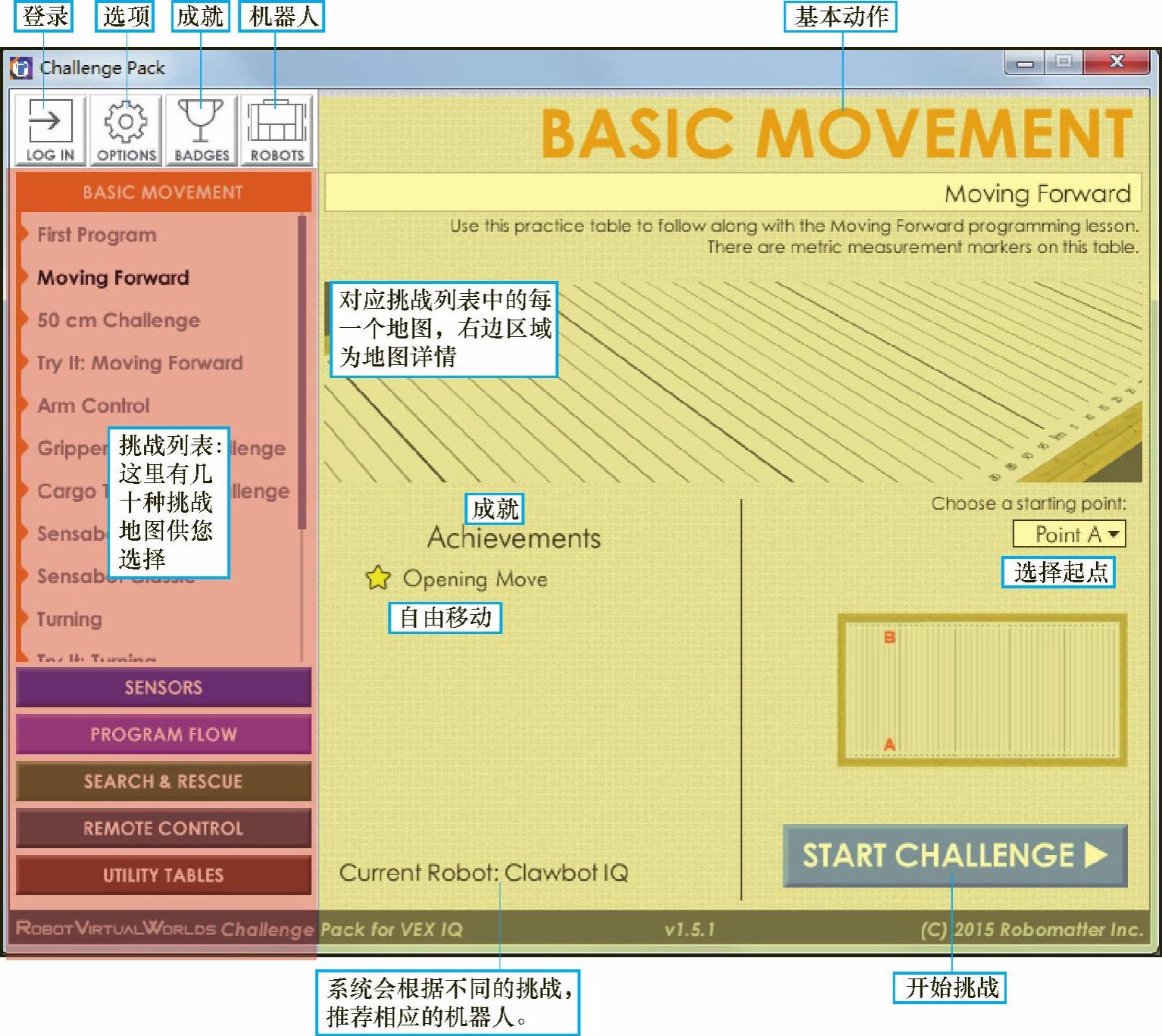
图 1-66
1.选项
在选项中有如下界面,如图1-67、图1-68所示。
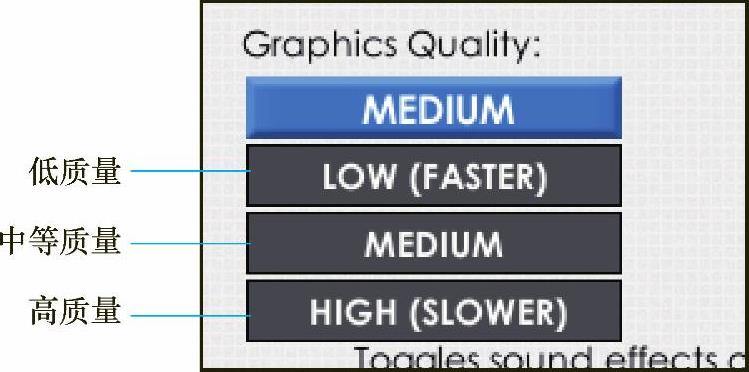
图 1-67
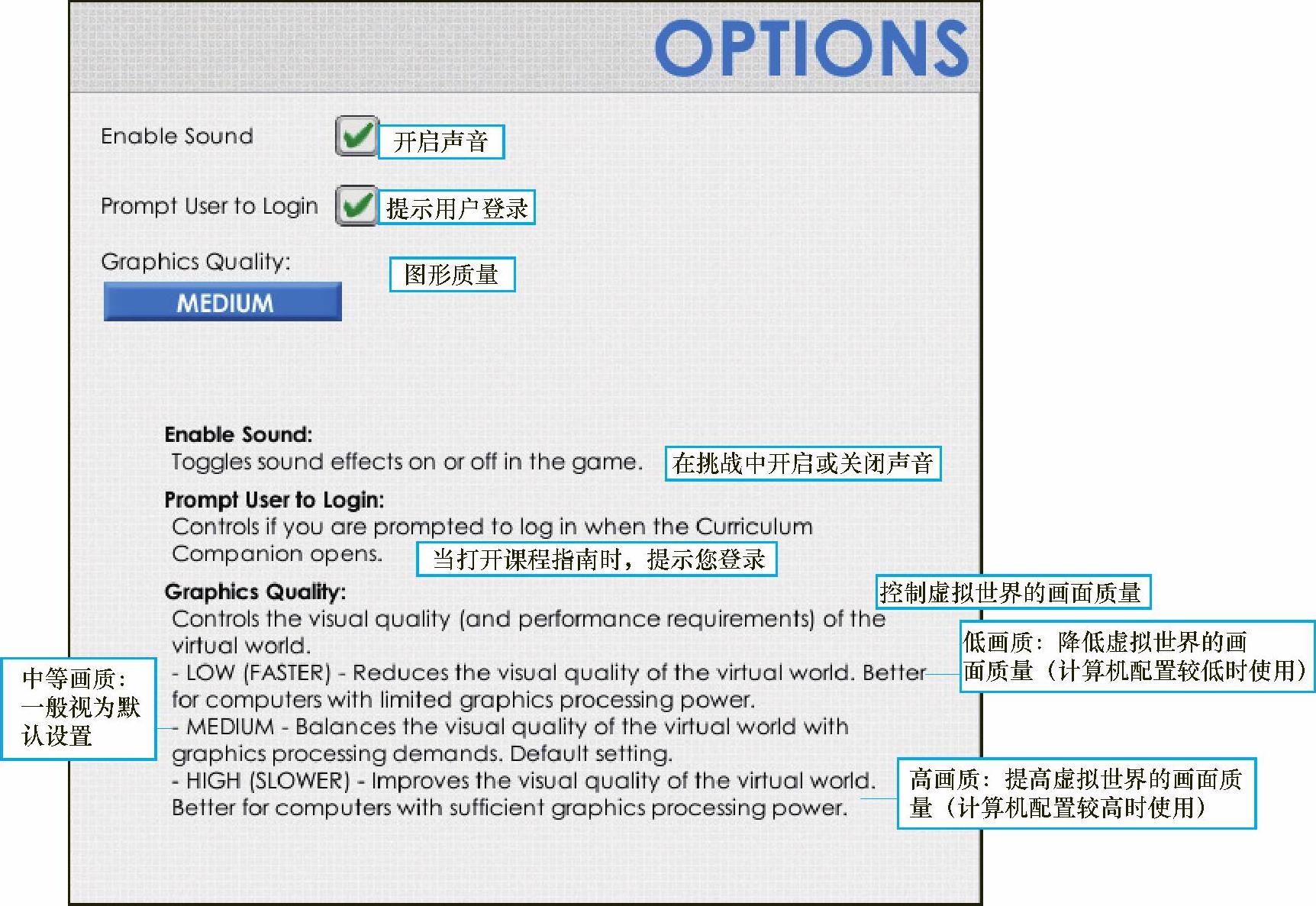
图 1-68
2.成就
每当完成一个挑战,根据完成度的不同,就会解锁相应的成就,在这里可以看到所有成就,如图1-69所示。
图 1-69
3.机器人
(1)抓手机器人(https://www.xing528.com)
在这里列出了常用的几种机器人,每种机器人的传感器不同,设置不同,所发挥的功能也都不同,用它们分别来挑战不同的地图,如图1-70所示。
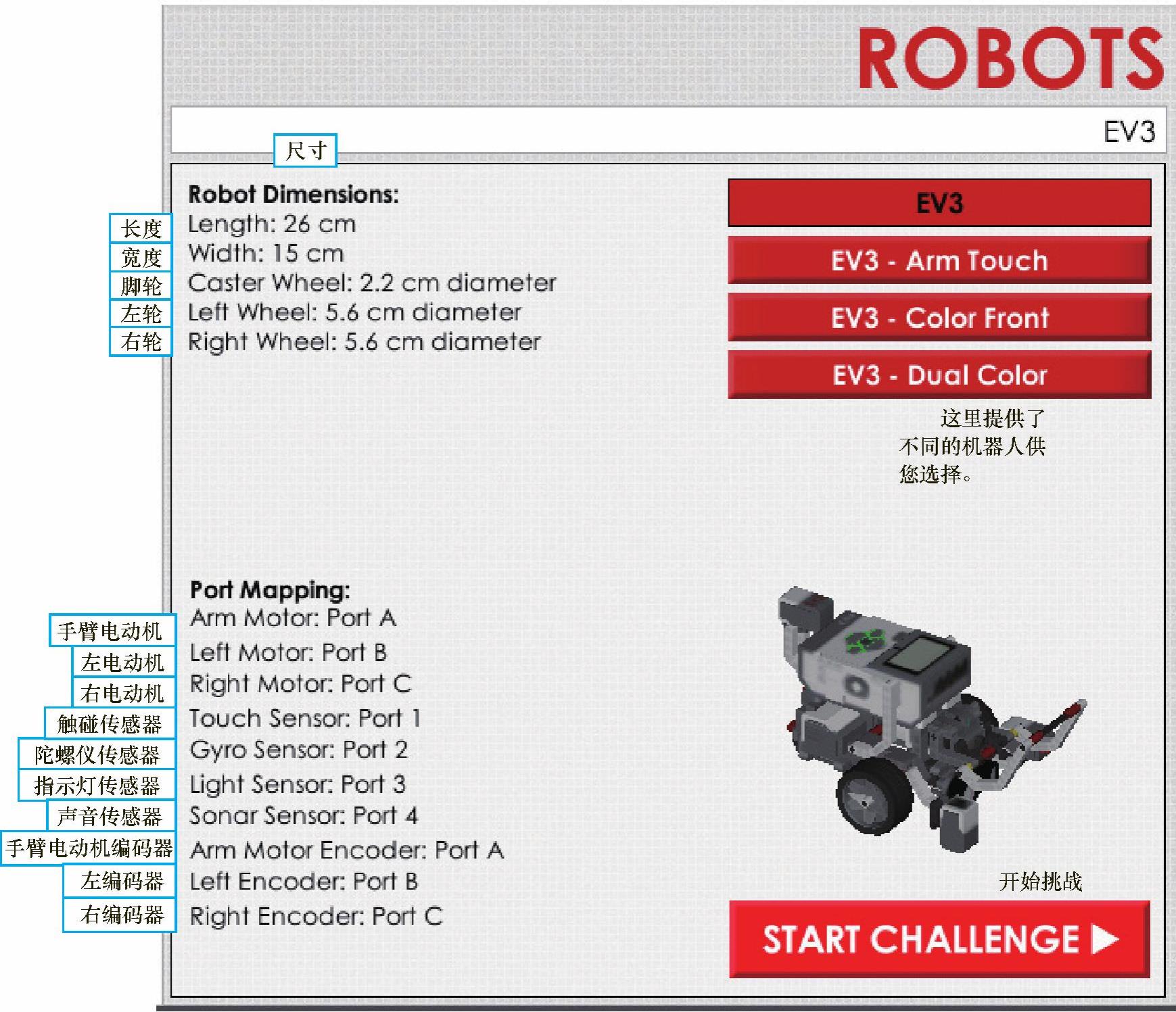
图 1-70
选好挑战地图与机器人之后,单击START CHALLENGE(开始挑战)按钮进入挑战场地,如图1-71所示。
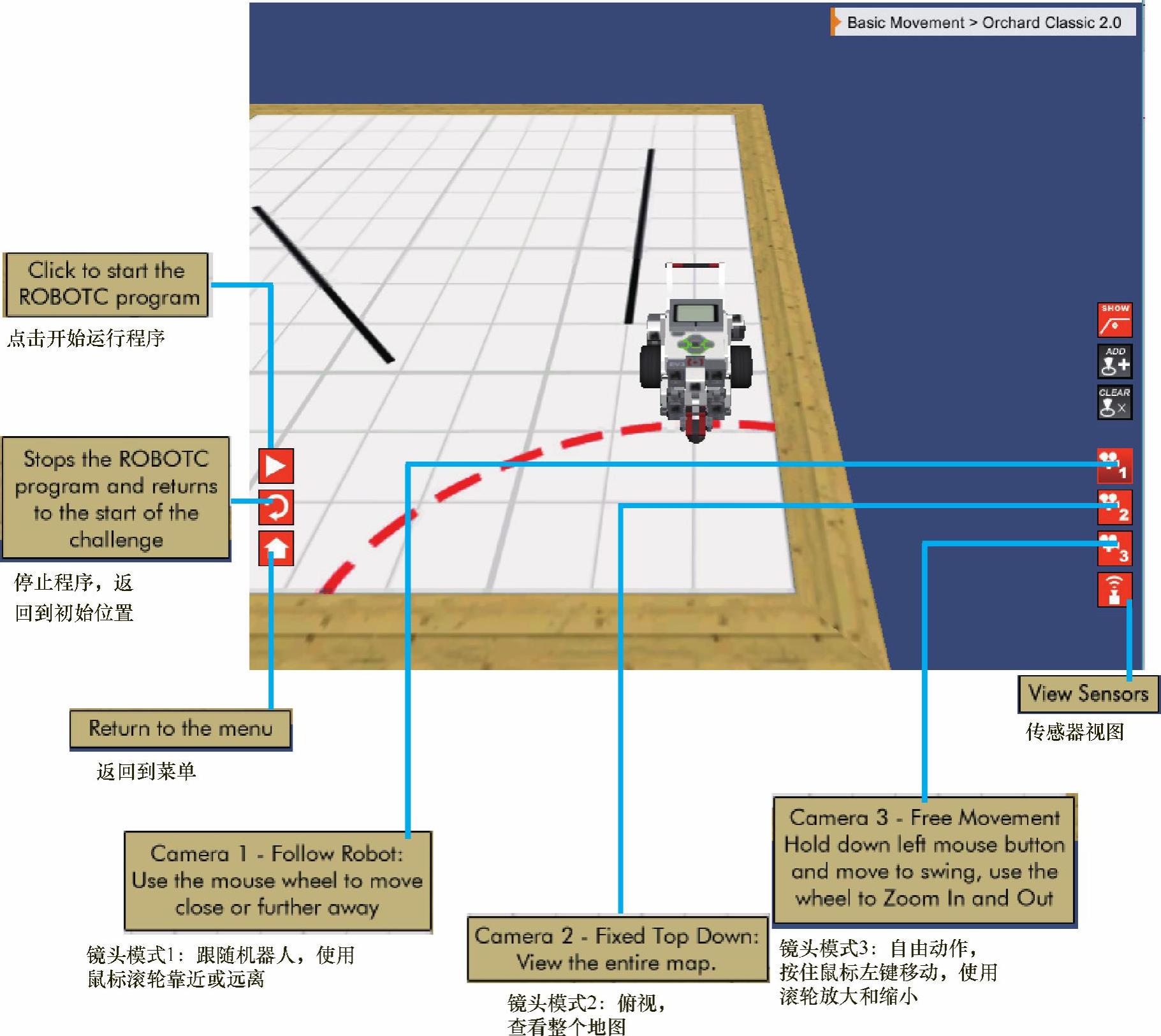
图 1-71
镜头模式2如图1-72所示:
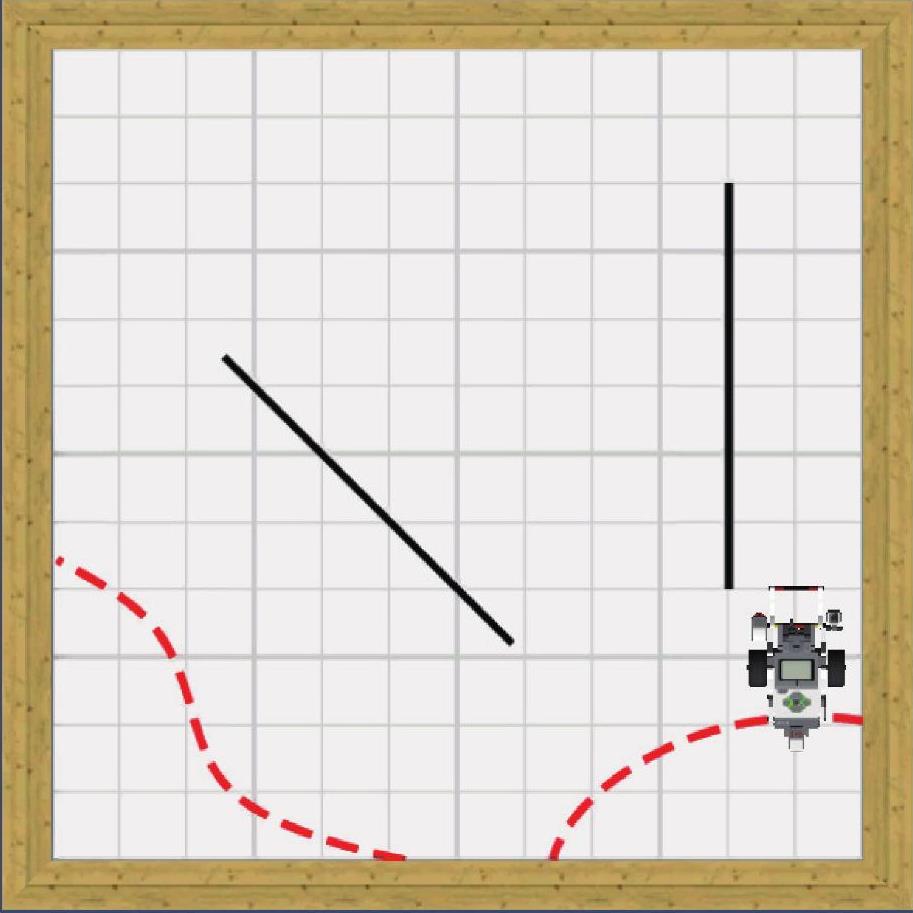
图 1-72
镜头模式3如图1-73所示:
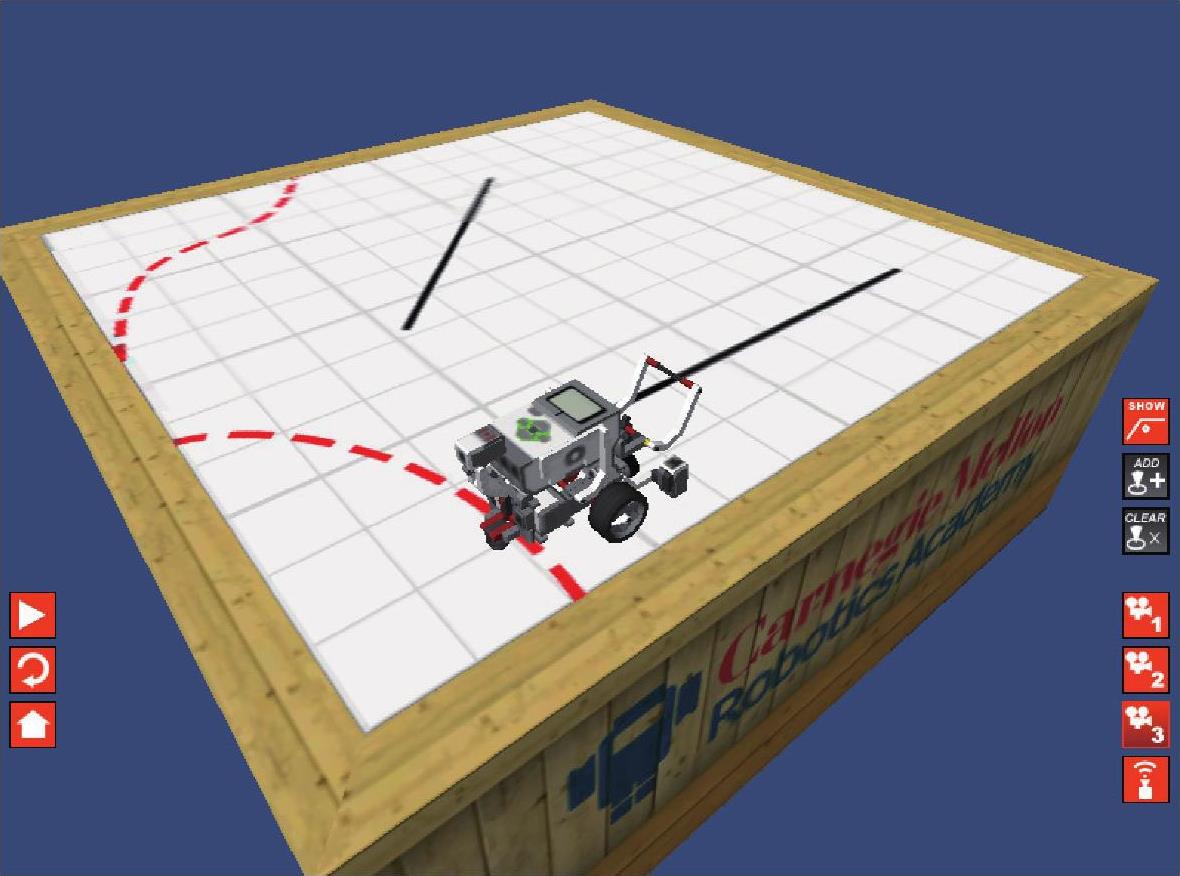
图 1-73
挑战地图中包括基本运动、传感器、程序流程、搜索与营救、多功能赛台五大类,下面分别对这几类进行简单介绍。
(2)基本运动挑战
基本运动顾名思义就是指机器人最基础的一些动作,如前进、后退、转弯等,而挑战地图也是由浅入深,逐渐带着用户熟悉虚拟世界,掌握ROBOTC编程,如图1-74所示。
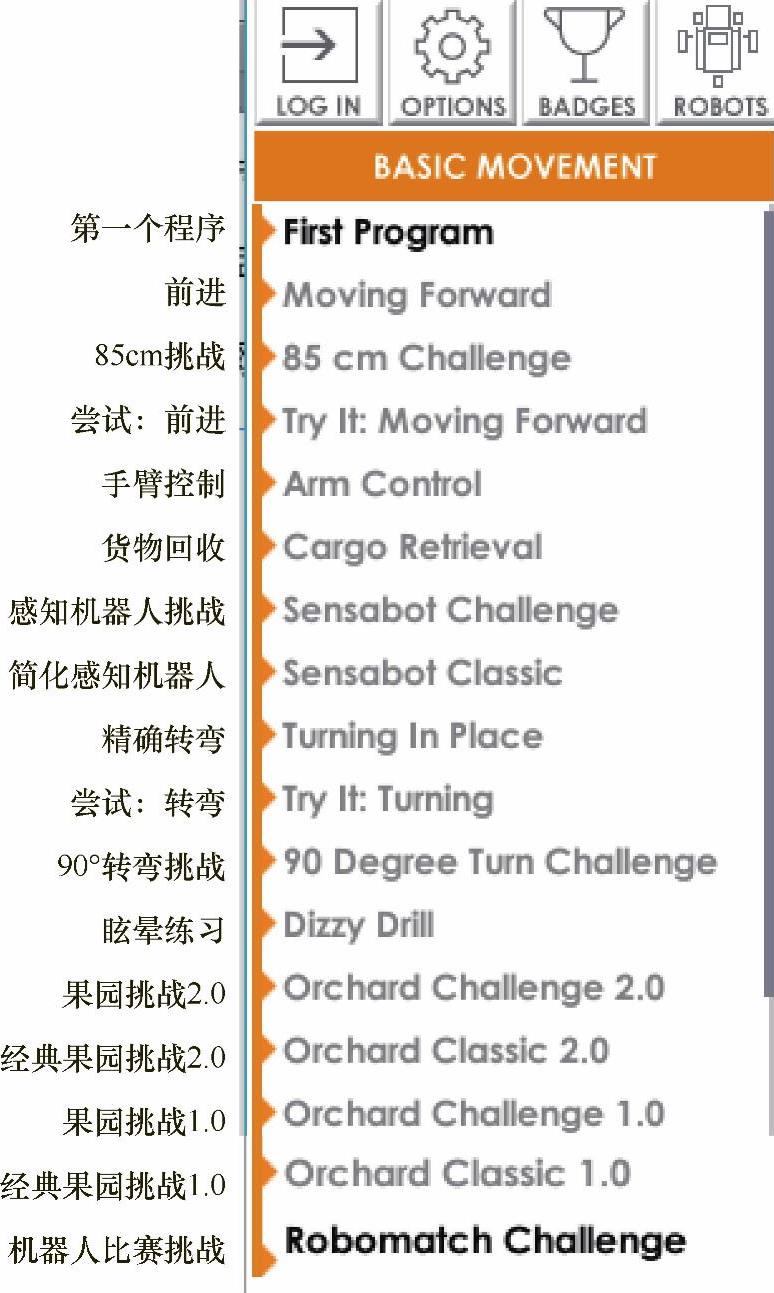
图 1-74
(3)传感器挑战
传感器挑战带用户学习各个传感器的功能与用法,通过不同的挑战学习到传感器不同的效果与拓展,如图1-75所示。

图 1-75
(4)程序流程
在这一挑战系列中,将众多程序、动作、传感器等放在一起,设计一个较为复杂的任务,可以更轻松地学习多种传感器,以及程序之间的配合,从而做出自已所需要的效果,如图1-76所示。
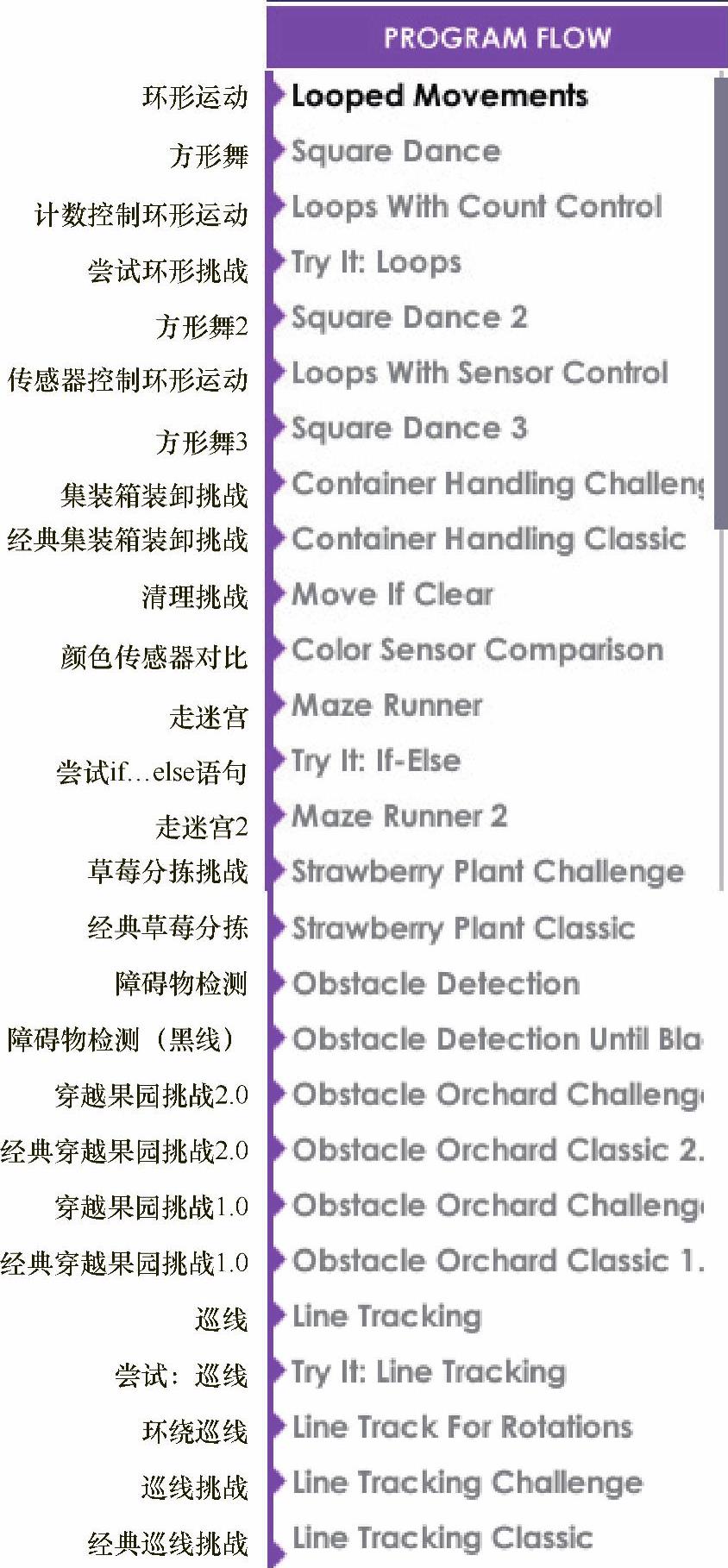
图 1-76
(5)搜索与救援
搜索与救援如图1-77所示。
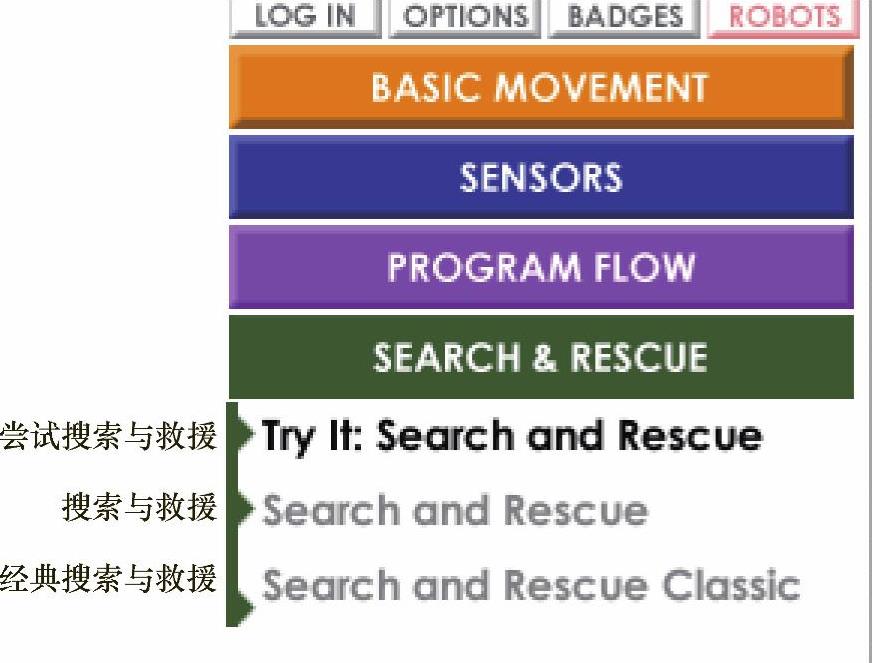
图 1-77
(6)多功能赛台挑战
多功能赛台挑战如图1-78所示。
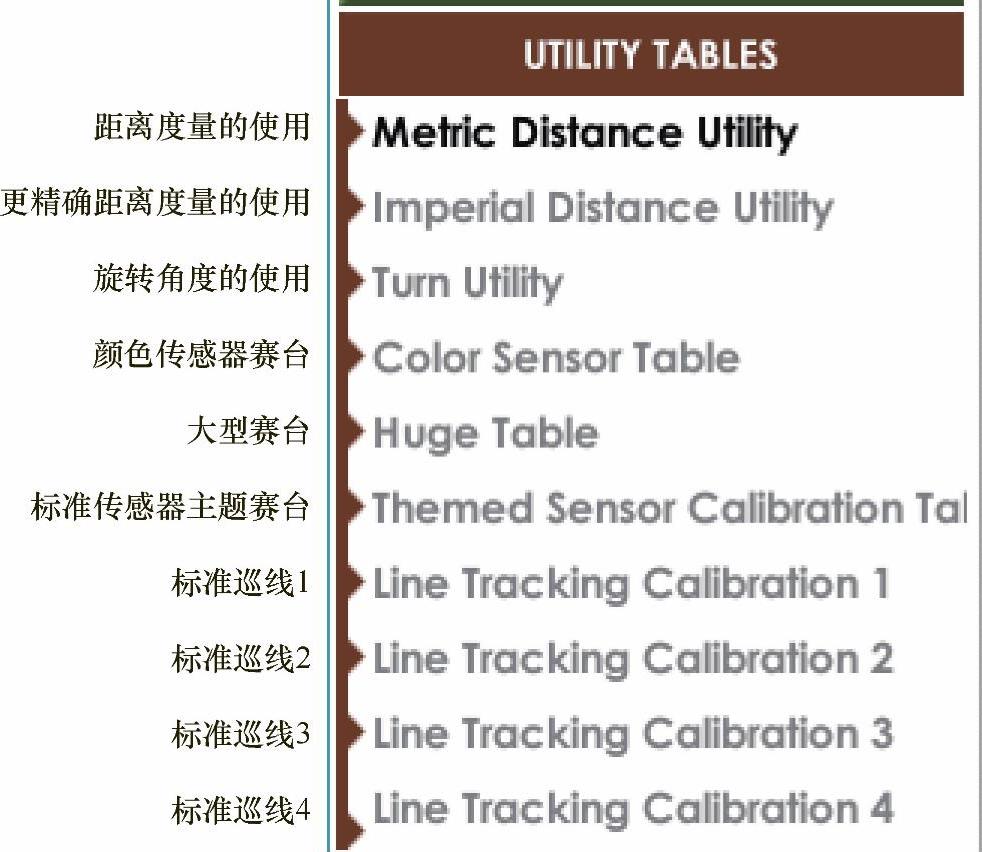
图 1-78
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。