



变频器的PID控制功能可实现与传感器元件构成一个闭环控制系统,从而可对被控量进行自动调节,在对温度、压力、风量和流量等参数要求恒定的场合应用十分广泛,这也是变频器在节能控制应用中的常用方法。由变频器端子2输入信号或参数设定值作为目标值和端子4输入信号作为反馈量可组成PID控制的反馈系统。
1.PID控制原理
(1)基本PID控制
基本PID控制框图如图1-43所示,系统运行示意图如图1-44所示。
(2)PID控制方式
1)PI控制。PI控制由比例控制(P)和积分控制(I)组合而成,根据偏差及时间变化,产生一个执行量。PI运算是P和I运算之和。
2)PD控制。PD控制由比例控制(P)和微分控制(D)组合而成,根据改变动态特性的偏差速率,产生一个执行量。PD运算是P和D运算之和。
3)PID控制。利用PI控制和PD控制的优点组合成的控制。PID运算是P、I和D三个运算的总和。偏差与执行量(输出频率)之间的关系:
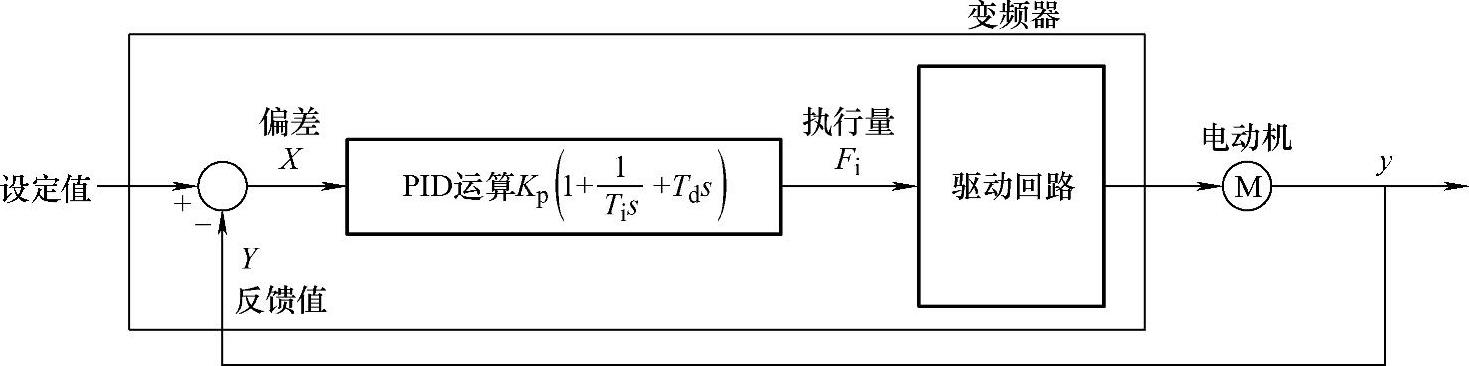
图1-43 PID控制框图
Kp—比例常数 Ti—积分时间 s—演算子 Td—微分时间
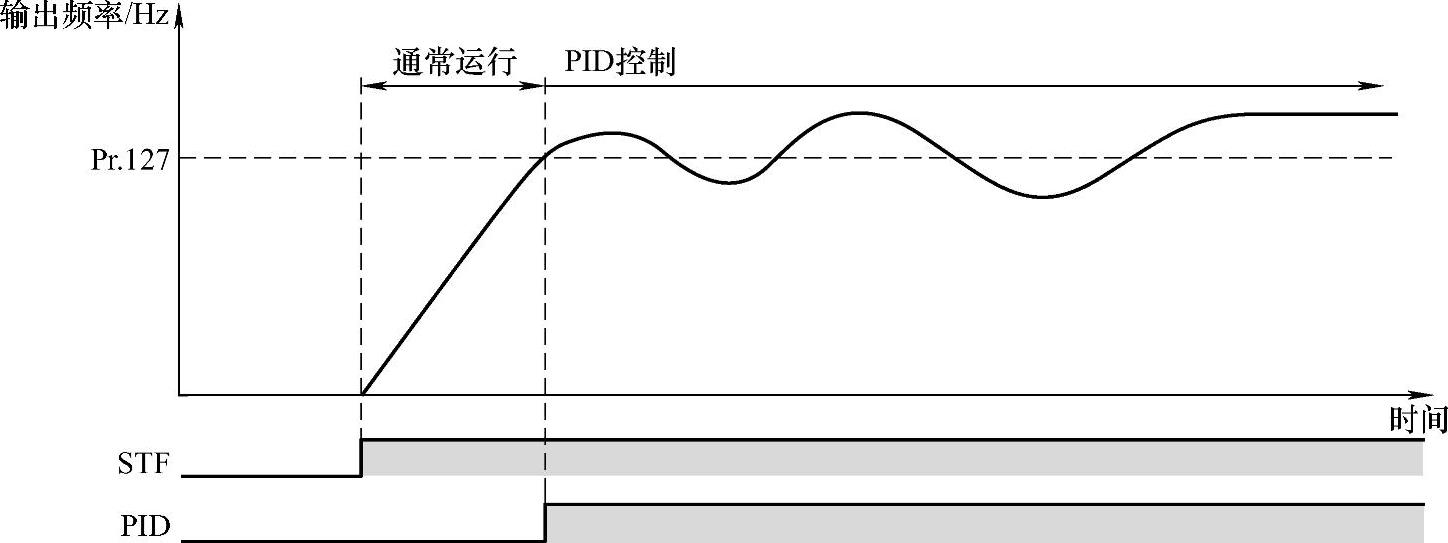
图1-44 PID系统运行示意图
①负作用。当偏差×(设定值-反馈量)为正时,增加执行量(输出频率),如果偏差为负,则减小执行量。PID负作用如图1-45所示。
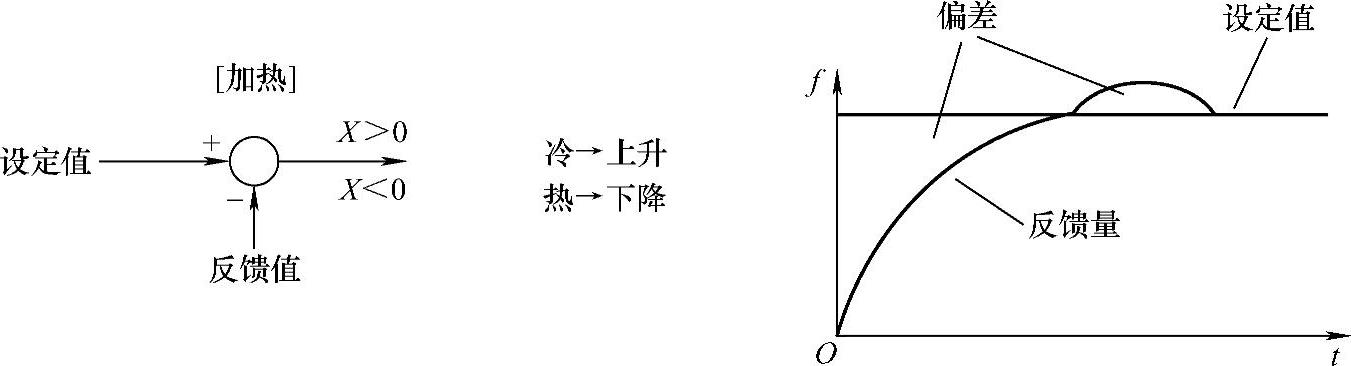
图1-45 PID负作用示意图
②正作用。当偏差×(设定值-反馈量)为负时,增加执行量(输出频率),如果偏差为正,则减小执行量。PID正作用如图1-46所示。
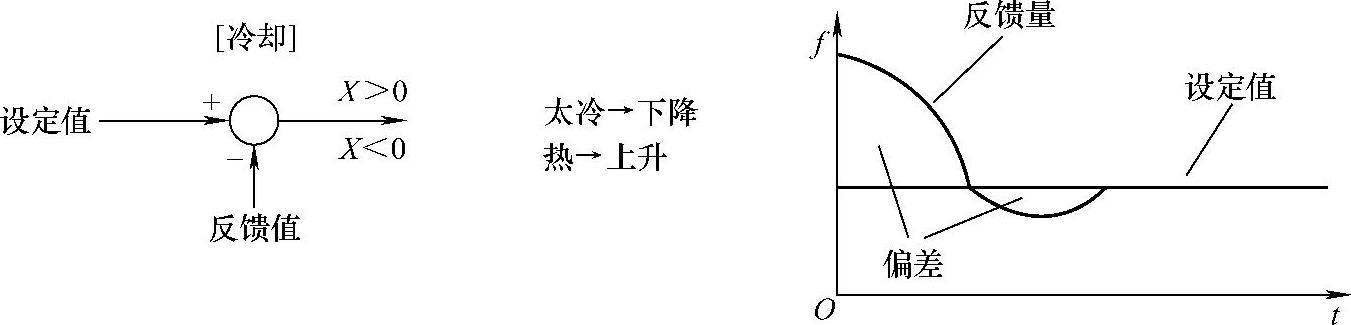
图1-46 PID正作用示意图
2.输入/输出信号
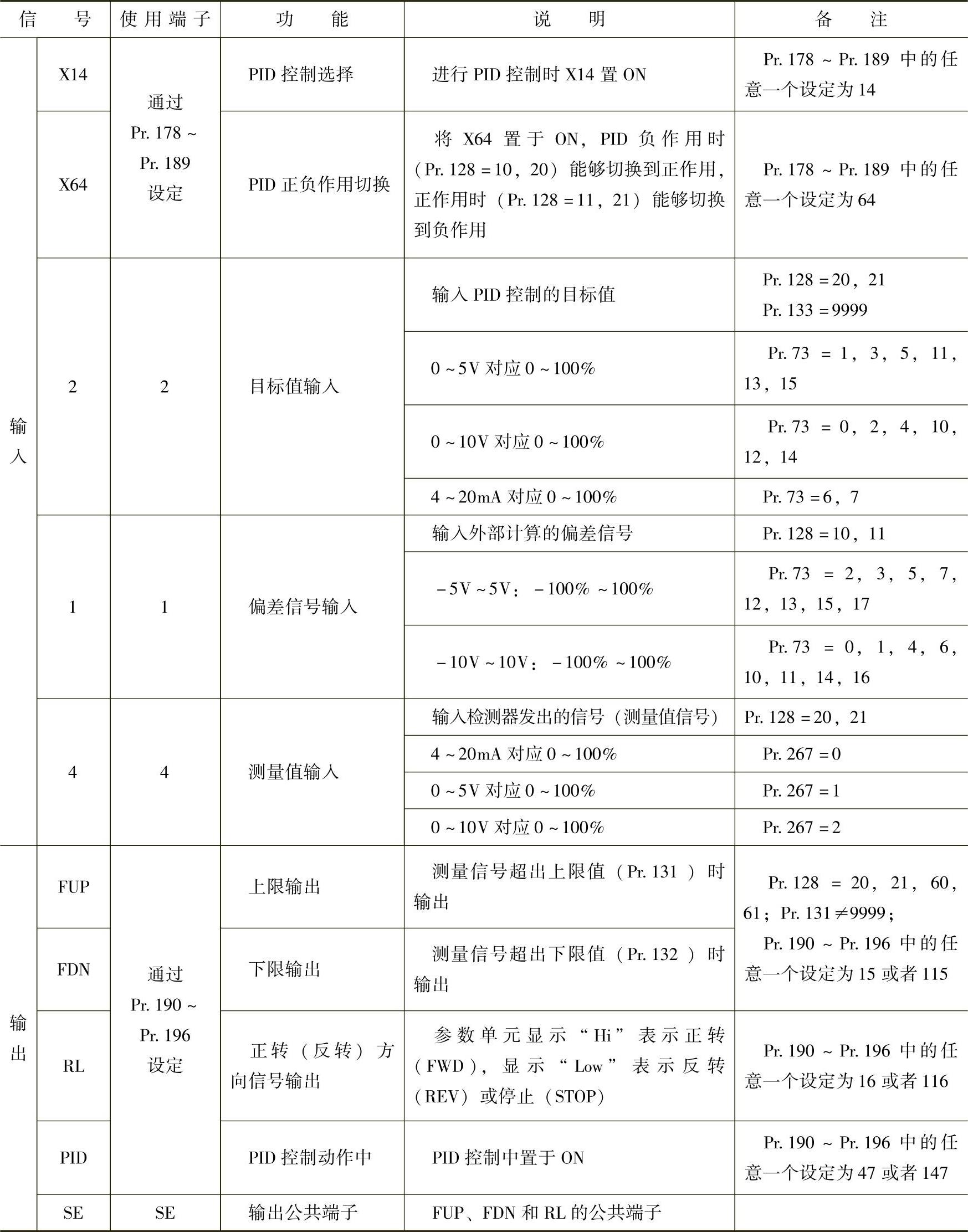
输入/输出信号功能使用见表1-29。
表1-29 输入/输出信号功能使用表
 (https://www.xing528.com)
(https://www.xing528.com)
X14信号接通,开始PID控制,当信号关断时,变频器的运行不含PID的作用。设定值通过变频器端子2-5或在Pr.33中设定,反馈值信号通过变频器端子4-5输入。当输入外部计算偏差信号时,通过端子1-5输入,同时,在Pr.128中设定“10”或“11”。
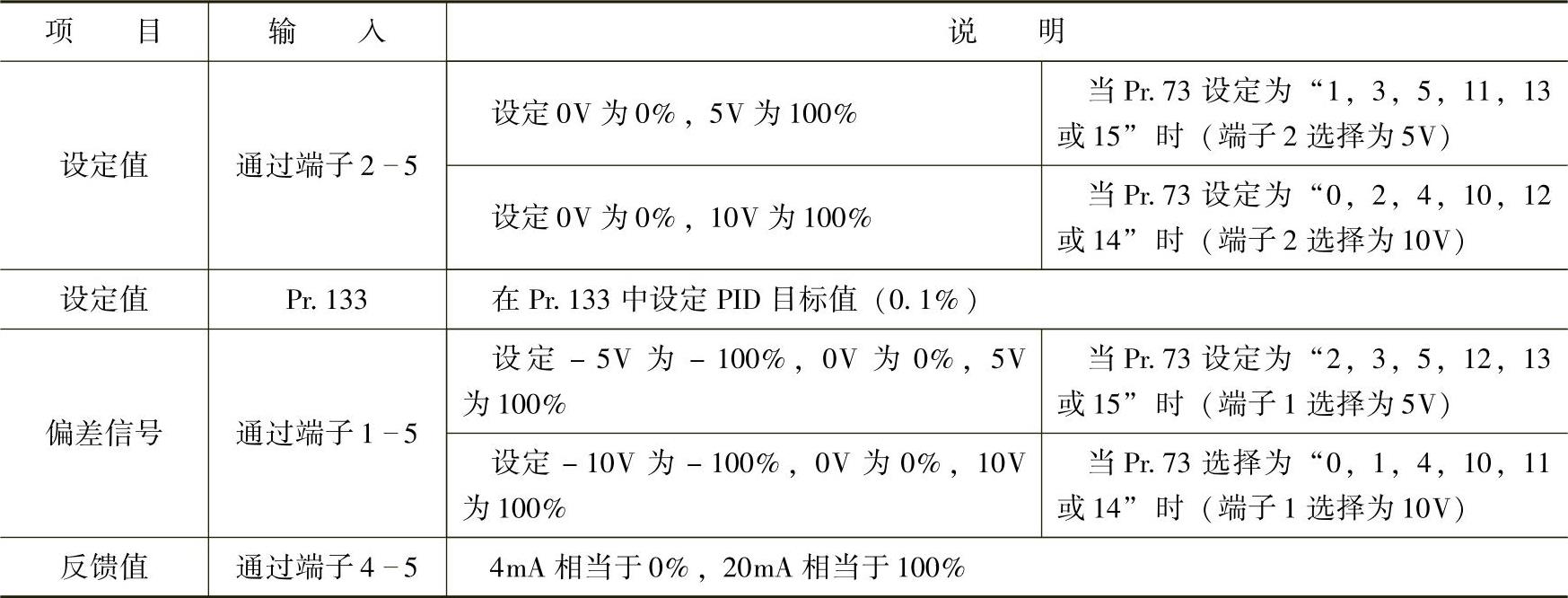
输入端子设定说明见表1-30。
表1-30 输入端子设定说明表
3.与PID控制有关的参数
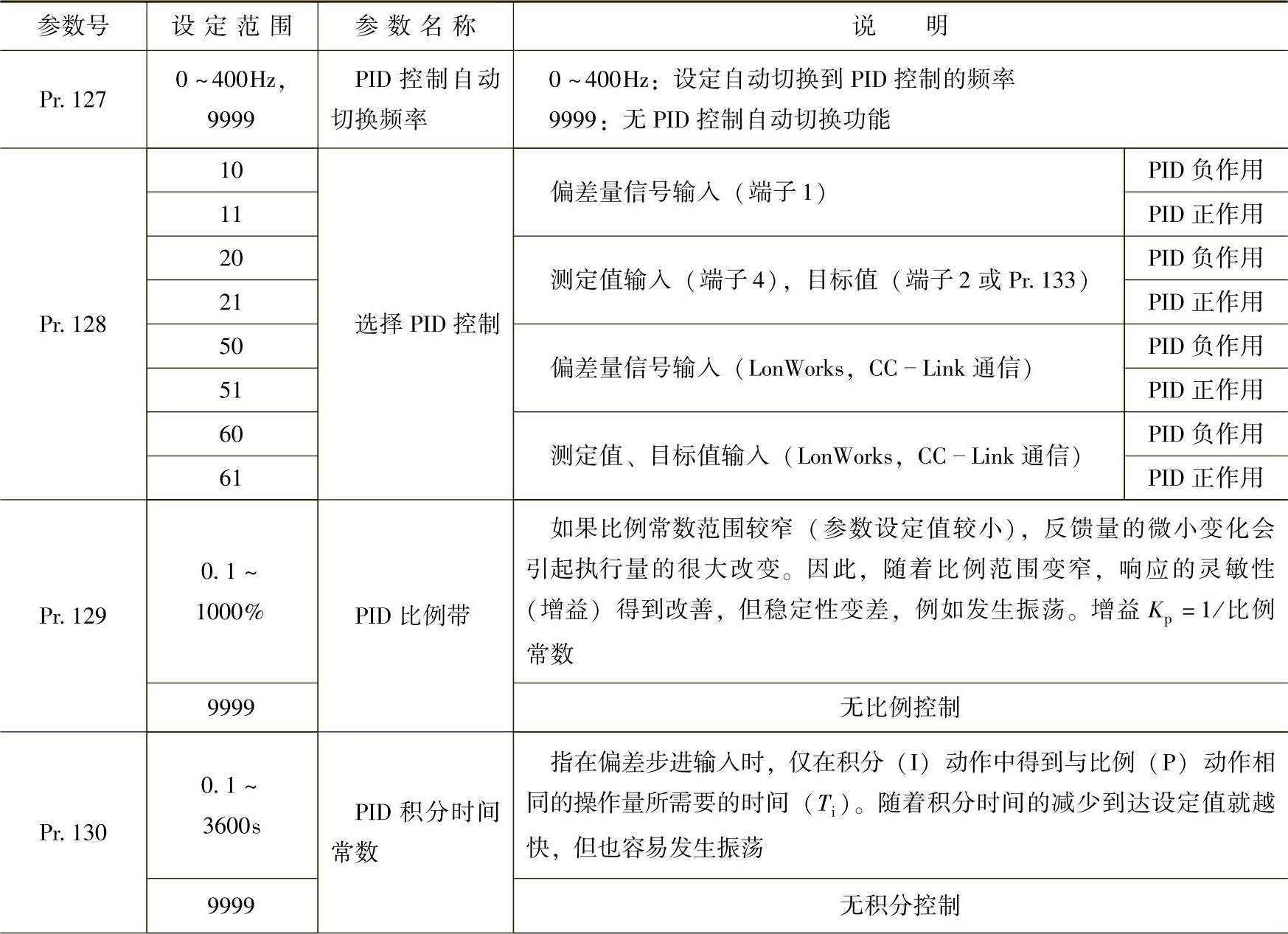
(1)PID参数设定分析(见表1-31)
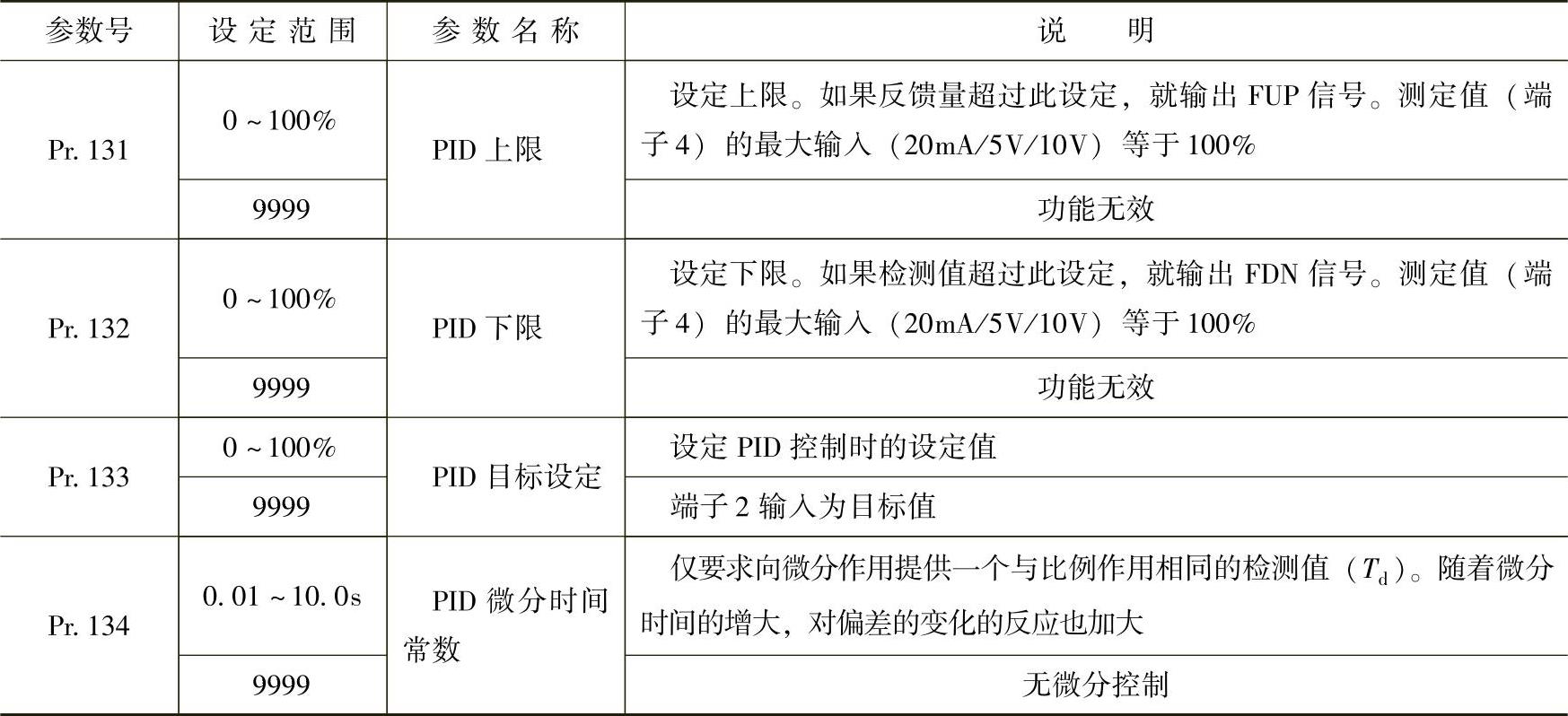
表1-31 PID参数设定表
(续)
(2)PID自动切换控制(Pr.127)
为了减小运行开始时系统的起动时间,可以仅在起动时以通常运行模式起动。
Pr.127 PID控制自动切换频率在0~400Hz的范围内设定频率,从起动到到达Pr.127设定值,以通常运行转为起动PID控制运行。变为PID控制运行后,即使输出频率在Pr.127的设定值以下,也继续进行PID控制。
(3)Pr.128设定说明(见图1-47、图1-48)
Pr.128=“10,11”(偏差值信号输入)
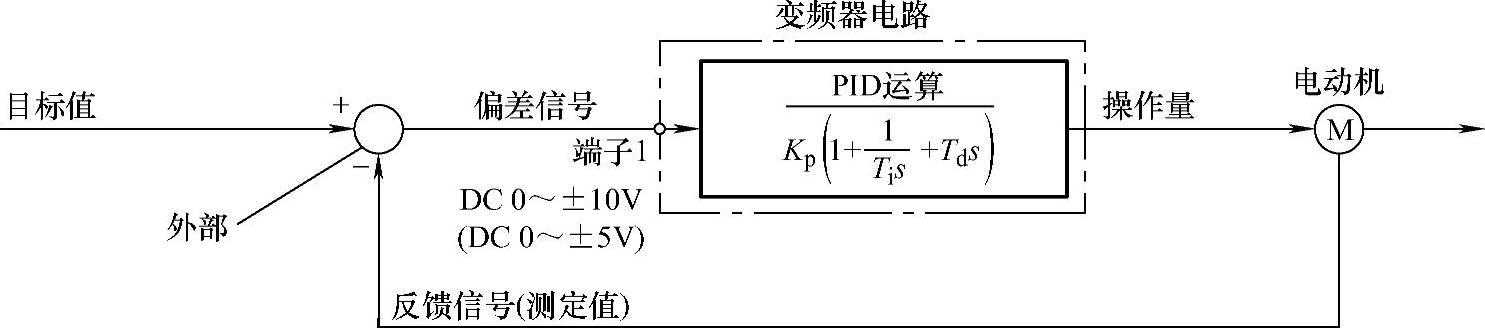
图1-47 Pr.128设定为偏差信号输入
Kp—比例常数 Ti—积分时间 s—演算子 Td—微分时间
Pr.128=“20,21”(测定值输入)
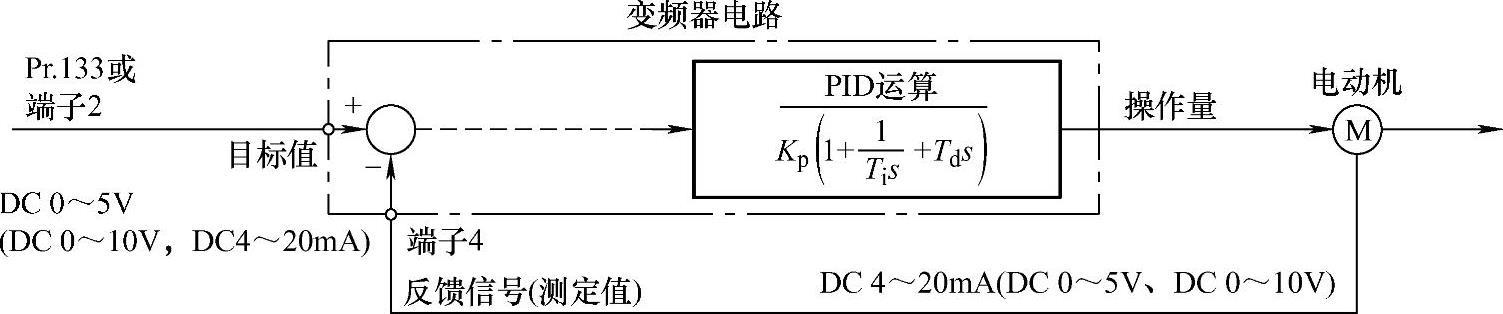
图1-48 Pr.128设定为测定值输入
Kp—比例常数 Ti—积分时间 s—演算子 Td—微分时间
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。