



1.T6216C落地镗床对调速系统的一般要求
T6216C落地镗床是一种大型精密加工机床。它所镗的孔要求有准确的坐标尺寸。除了镗孔外,还可以进行钻孔、铣平面、车外圆、车螺纹等多种加工。工艺范围广是镗床的特点。因此,镗床要求调速范围宽、运动方位多、运行稳定性好。
镗床的主拖动和进给拖动均为不频繁的正反转运行。主拖动是主轴的旋转或平旋盘的旋转,其转速为8~1250r/min,进给量在0.01~0.06mm范围内变化。主拖动电动机选用Z2-72-T2型(方法兰盘式)他励直流电动机,进给拖动电动机选用Z2S-52-T2型(小法兰盘式)他励直流电动机。
2.所选用直流调速系统的组成原理
该镗床选用晶闸管电流、转速双闭环不可逆直流调速系统,其原理如图5-62所示。它用于他励直流电动机的电枢和磁场的供电系统,可实现单象限运行的控制,或者用接触器改变其供电极性,实现正反转可逆控制。
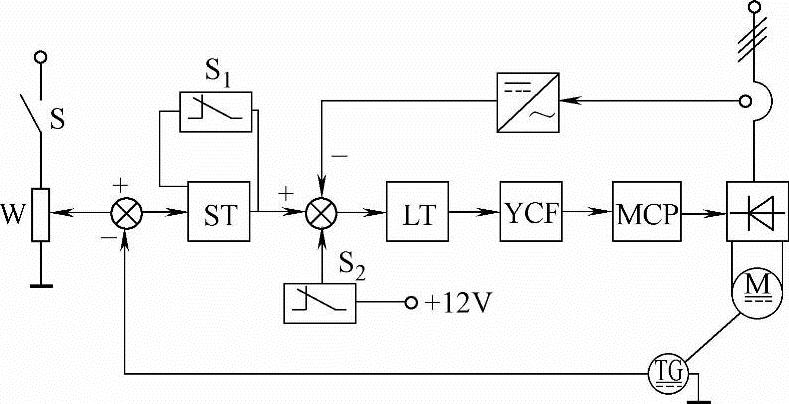
图5-62 T6216C落地镗床晶闸管直流调速系统的原理
主回路是采用三相全控桥式整流电路。该系统的调速范围宽、稳定性好,可用于对制动要求不高、正反转不频繁的场合。其技术指标如下:
1)额定直流输出电压为400~440V。
2)额定直流输出电流为50A。
3)交流电源为三相380V,50Hz(当用于60Hz时,αmin和βmin要重新调整)。
4)电网电压波动为+10%和-5%。
5)励磁电源为交流220V,5A。
6)调速范围D≥100。
7)静差率δ≤±5%。
8)使用环境为海拔1000m以下,环境温度为0~145℃,空气相对湿度小于85%,无腐蚀,无爆炸,无严重导电尘埃及灰尘等。
3.系统各主要环节的原理识读
(1)稳压电源WY(见图5-63) 控制单元用±12V串联型稳压电源,负载能力为±500mA,设有保护装置。+16V电源供给控制单元和功率单元有关部分使用,负载能力为500mA,为单管串联稳压电源。该单元还设有三相整流桥(V22~V27),其作用是将来自电流互感器H1、H2(见图5-63)的电流信号进行整流,在电阻R13上获得一个电信号,作为电流调节器的反馈信号。RP2用来调节过电流信号的大小,将波段开关置于相应位置,电压表可指示过电流保护信号的大小及稳压电源电压值(见图5-64)。
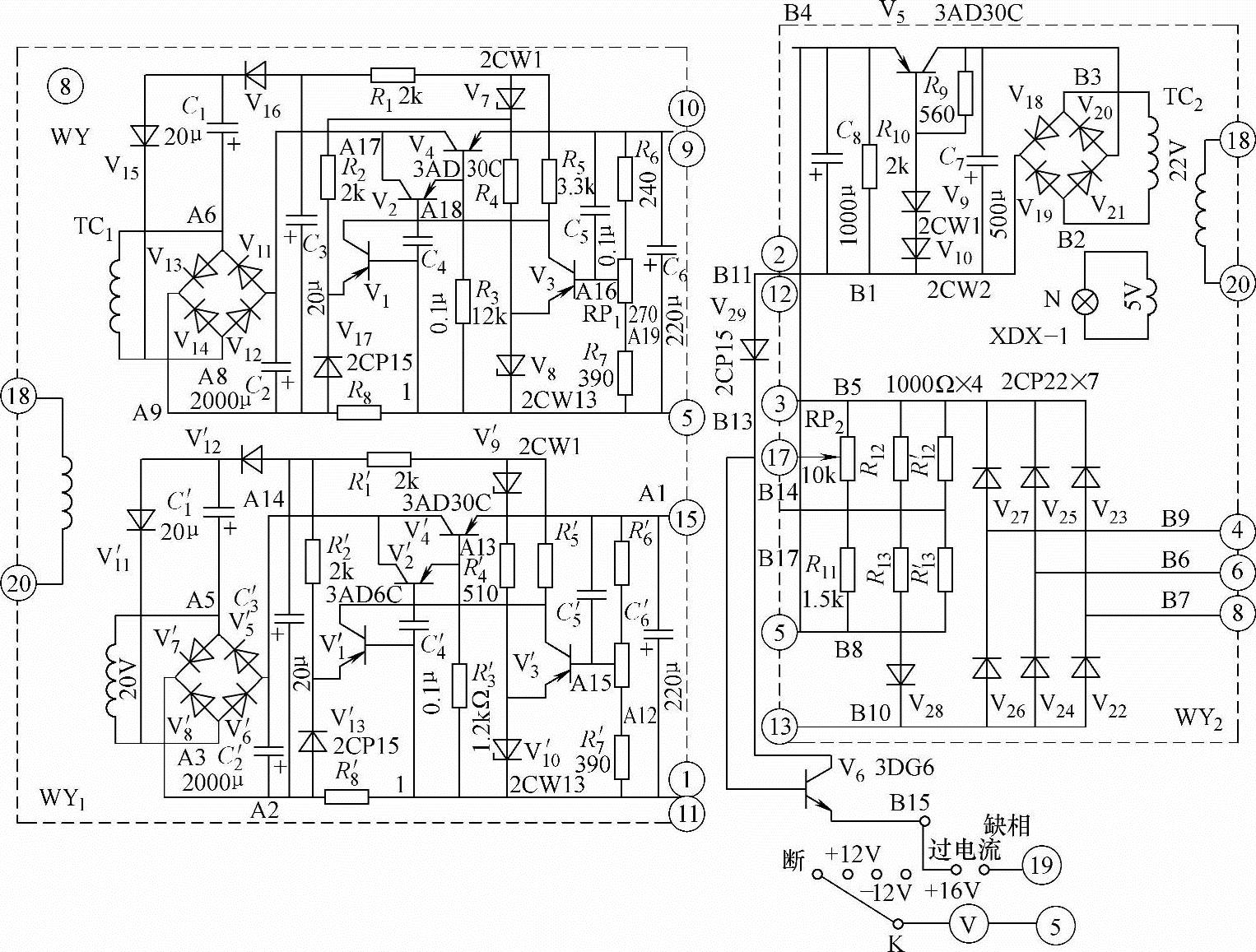
图5-63 稳压电源WY
速度调节器为带并联校正电路的PI调节器,并联校正在此能减小速度超调,R1、C1校正网络对抑制启动过程中的速度超调具有明显的效果。调节器输出的最大限幅值为±8V。电位器RP3和RP4分别为正限幅调节和负限幅调节。限幅绝对值的大小决定系统直流输出的最大电流。速度调节器的负向输出就是电流调节器的给定值。
RP2为比例调节电位器,12端为速度给定输入,13、14端之间为测速反馈输入,R6、R7作为测速反馈电压分压用。
保护环节的作用是:一旦过电流、超速、失磁,则系统即被拉入β区,封锁脉冲,并使事故继电器JJ动作。拉β信号由9端输出,JJ的常闭触点由2、4端作为事故信号输出。
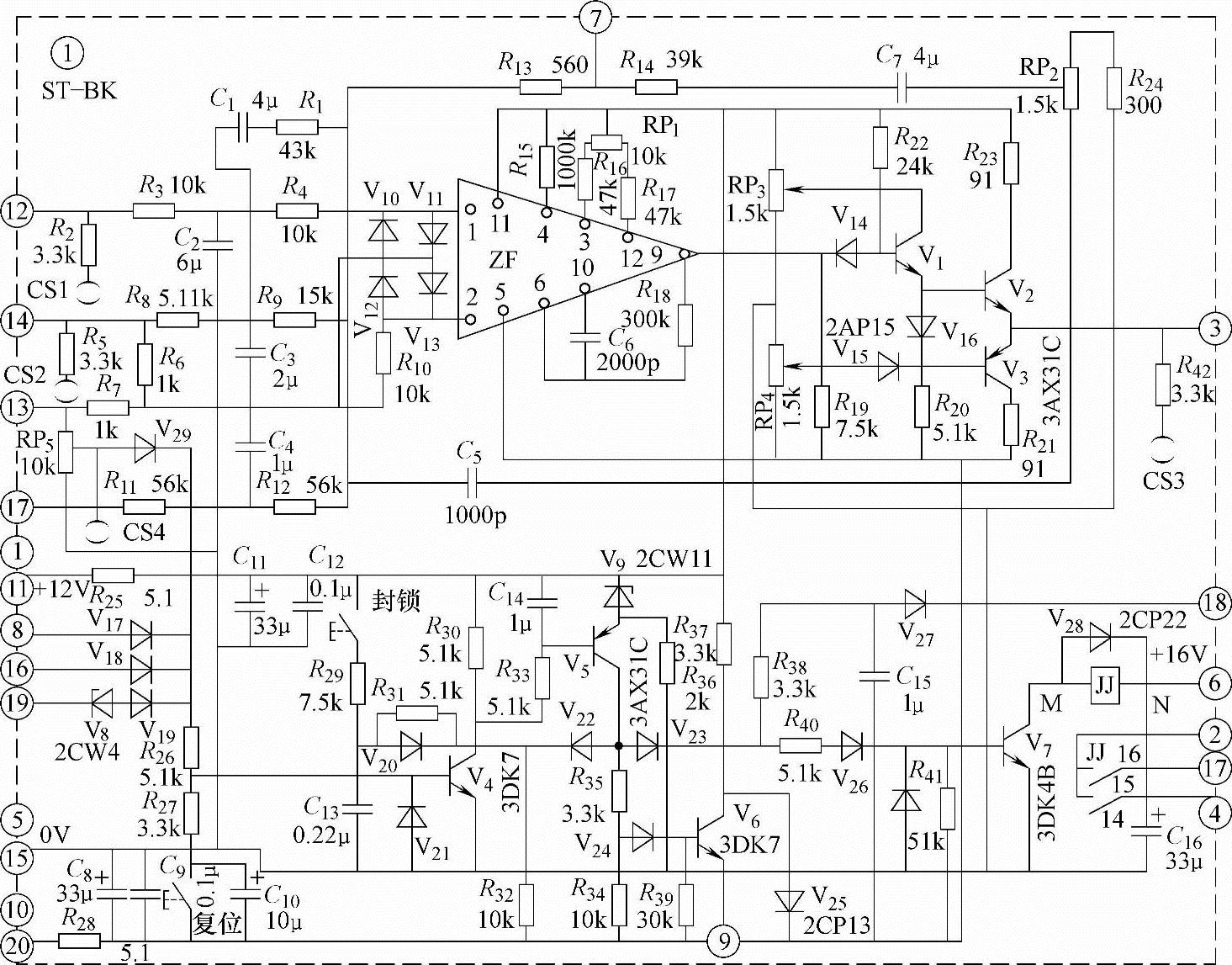
图5-64 速度调节器及保护开关电路ST-BK原理
注:1.R26及C7的参数在调整中确定,其范围分别为2~7.5kΩ及2~6μF。
2.图中未标号的二极管均为2CP15。
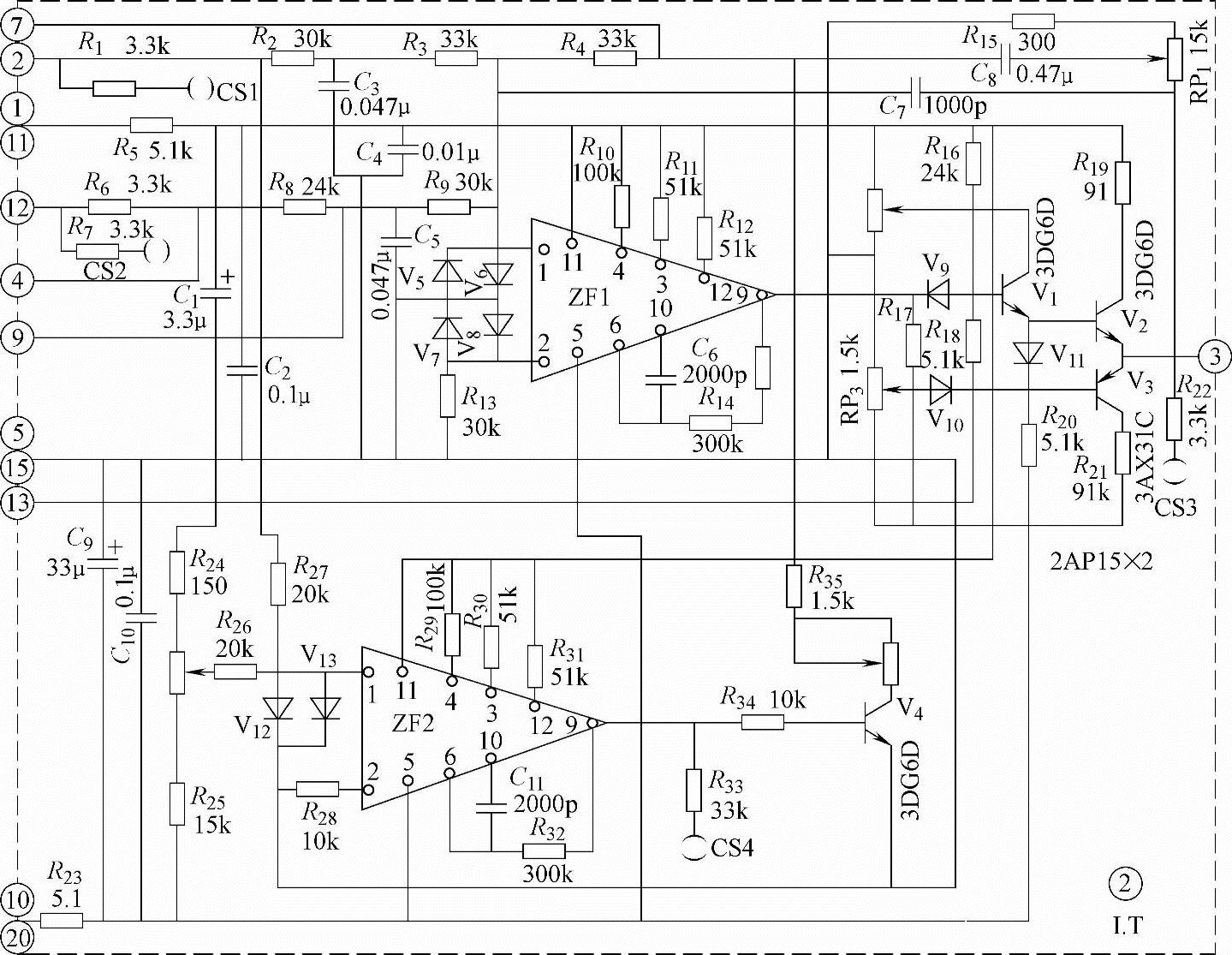
(3)电流调节器LT(见图5-65) LT由主调节器和电流自适应开关两部分组成。主调节器是一个PI调节器,其正负限幅值分别由RP2和RP3调整,它决定了αmin=30°,βmin=30°。ZF2构成的电平检测开关用来鉴别主回路电流的断续情况,开关的输出控制三极管V4的通断,以完成调节机构的自动切换,实现对电枢电流的自适应控制,使系统在整个负载范围内有良好的动特性。在LT的调节板上,RP1为比例调节器电位器,RP4为自适应电平调节器,RP5为积分调节电位器。
(4)移相触发器YCF(见图5-66) 移相触发器采用双锯齿波形电路,即在一个周期内产生两个锯齿波(相位差180°)。三相全控桥需要三个双锯齿波形电路,它们分别为YCF(U)、YCF(V)、YCF(W),其正负测试孔分别为+U、-U、+V、-V、+W、-W。2、3两端为同步输入端。
V4的基极综合了下列三个输入:锯齿波电压输入(UC)、以⑨端输入控制电压(US)、偏置电压输入。这三个信号综合的结果,决定了触发脉冲的出现时刻。为了满足整流电路的触发要求,在脉冲功率放大之前,还必须将这两个脉冲加以分段,通过V8、V12构成的两个门电路来实现。在脉冲变压器作为负载的情况下,通过功率放大后输出的两个脉冲(12端与7端、13端与8端)之间相差角为180°。触发器YCF各点波形如图5-67所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图5-65 电流调节器LT原理
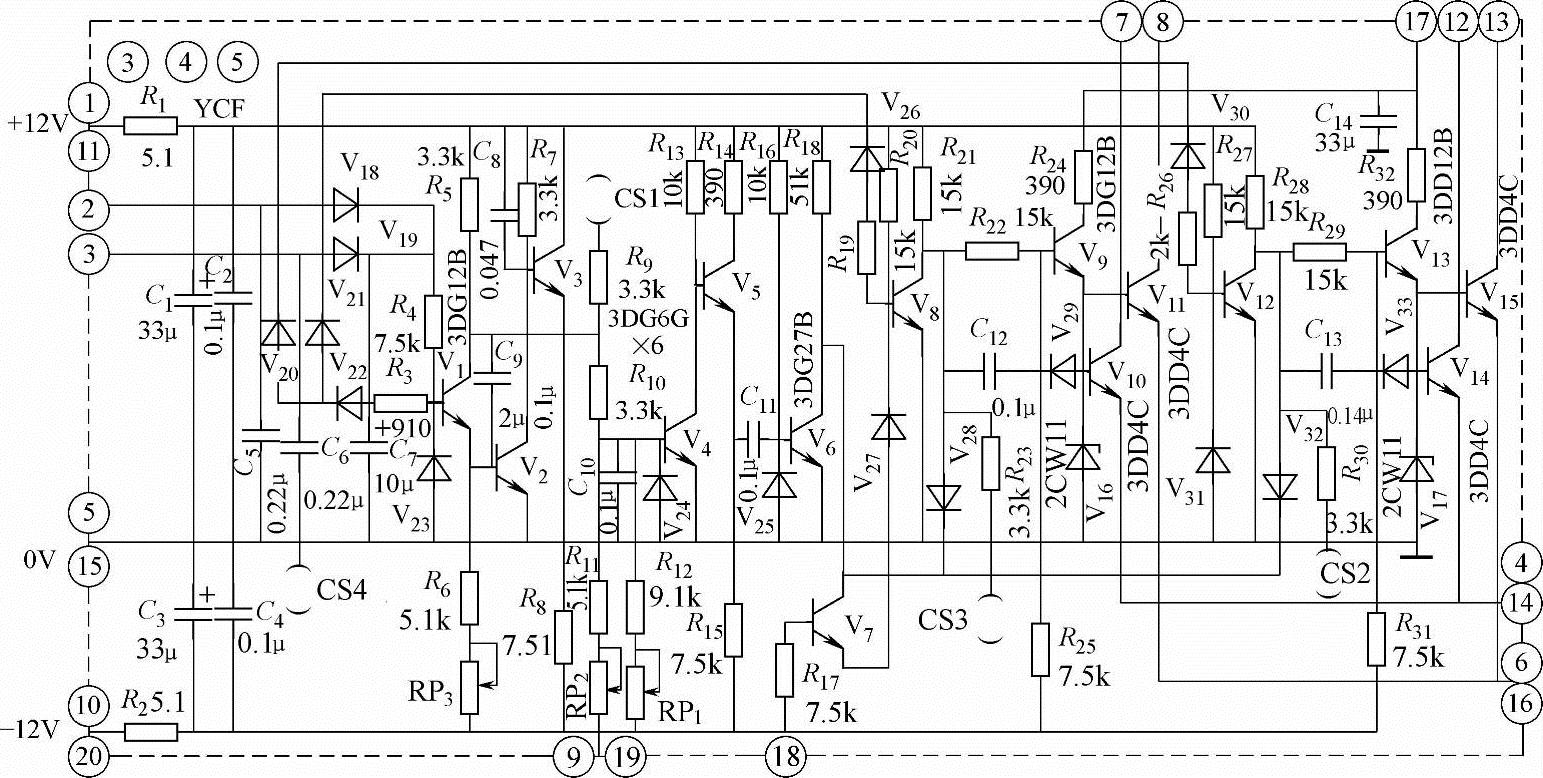
图5-66 移相触发器YCF原理
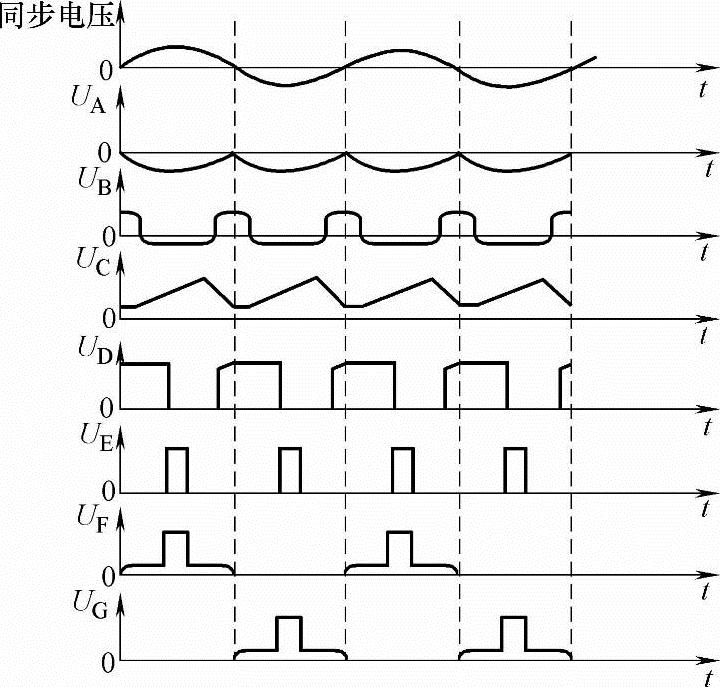
图5-67 触发器YCF各点波形(A、B、C)
(5)脉冲分配器MCP 脉冲分配器MCP原理如图5-72中⑥号板所示。脉冲分配器的作用是将来自移相触发器的脉冲进行适当分配,使之按照一定的规律依次同时触发两个晶闸管,触发间隔为60°电角度。在一周内(360°电角度),要求触发的顺序见表5-11。
表5-11 脉冲触发顺序表

脉冲分配器波形如图5-68所示。端子13~18波形基本相同,只是相位差60°。
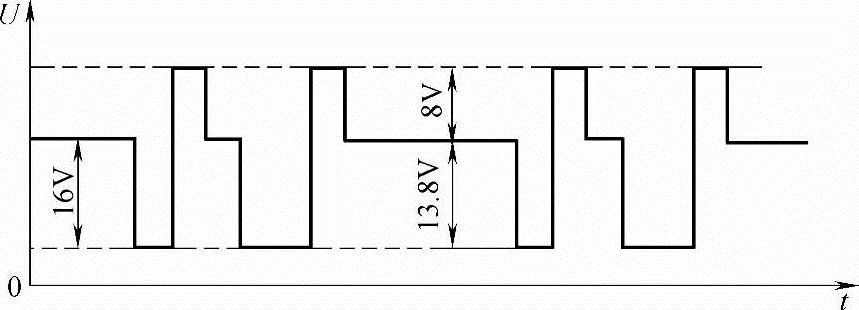
图5-68 脉冲分配器波形
(6)给定电源GD(见图5-69) 本单元包括:从3端与5端输出的速度给定信号,4端与12端输出的速度反馈信号,10端与19端输出的测速发电机励磁电流,8端与6端、9端与6端的通断分别控制正反组晶闸管的开或关,锁零继电器JS用来调整主拖动电动机欠磁电流阈值的电位器RP。
(7)同步电源BD(见图5-70) 同步变压器的联结组别为Dy1。本单元有相序指示电路,一旦相序有错,面板上的相序指示灯将熄灭。电流表用来指示输出电流的大小。
(8)主功率单元CF(见图5-71) 主要由6个功率晶闸管V1~V6组成三相全控桥式整流电路,向直流电动机提供调压调速的可控直流电源。改变三相全控桥式整流电路的输出电压,可实现无级平滑的调速。
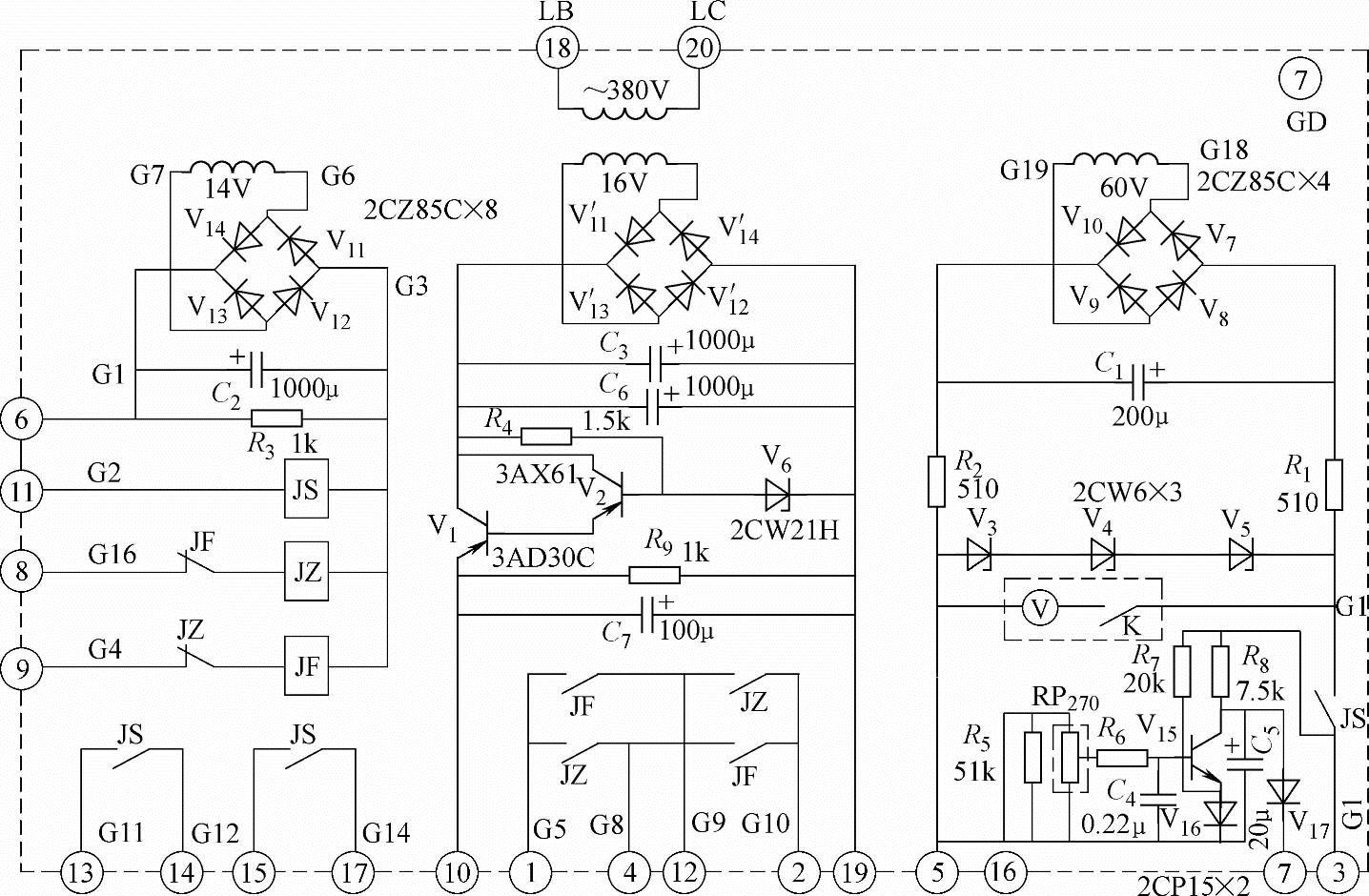
图5-69 给定电源GD原理图
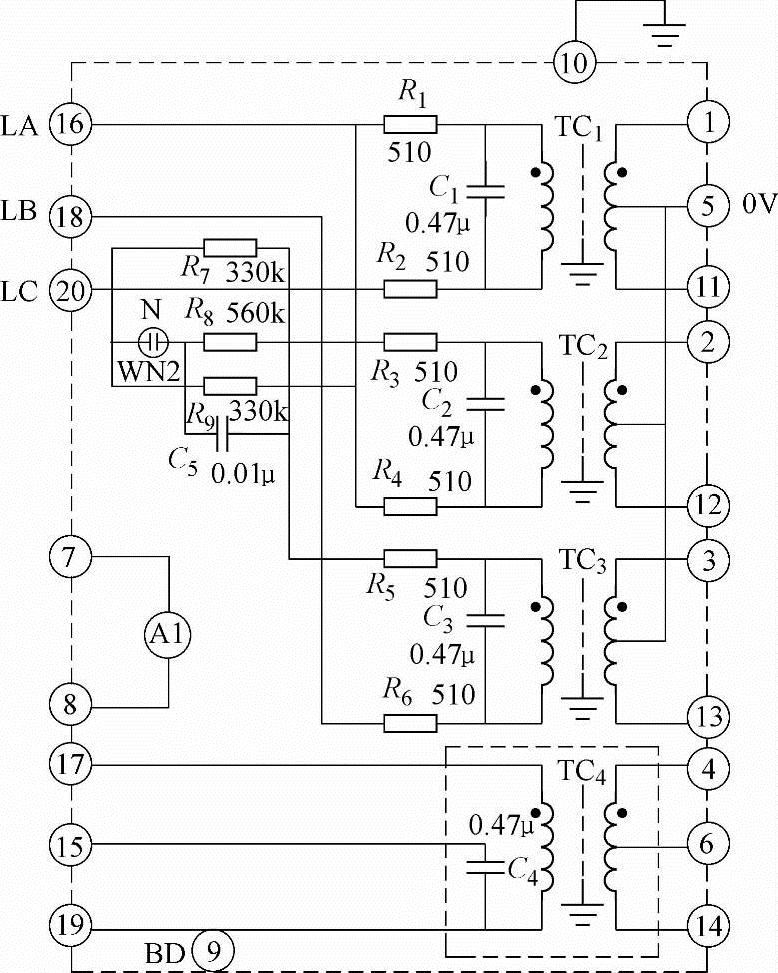
图5-70 同步电源BD原理图

图5-71 主功率单元CF原理图
(9)T6216C落地镗床电气控制原理总图识读 T6216C落地镗床电气控制原理总图如图5-72所示。它是由各单元的方框图和主回路及脉冲分配器组成的,各单元的相互连接使用其各自的出线端子号。
4.系统控制的动作原理识读分析
(1)启动过程 启动时,常闭触点K1、K2断开,速度给定电压Ugn加入速度调节器的输入端,其输出迅速达到限幅值。由于电动机的惯性,它的转速以及速度反馈电压Ufn的上升需一定时间。因此,在启动过程中,给定电压始终大于速度反馈电压,即ΔU=(Ugn-Ufn)>0,速度调节器的输出便一直处于限幅值。速度调节器不起作用,相当于转速环处于开环状态。这时,速度调节器的输出就是电流调节器LT的给定,也就是电枢电流的给定。在这个最大允许电流的作用下,LT的输出迅速上升,触发脉冲跟着前移(即α变小),使晶闸管整流装置输出电压迅速上升,电动机在最大限幅电流的作用下,以最大的加速度升速。随着转速的上升,给定电压Ugn和速度反馈电压Ufn的差值也随着减小,但由于速度调节器ST的高放大倍数和积分作用,其输出始终保持在限幅值。当转速大于给定转速时(少有超调),使速度反馈电压大于给定电压,ST的输入电压之差为负,即ΔU=(Ugn-Ufn)<0,ST退饱和,其输出下降,在电流降到小于负载电流时,转速又下降,直到转速反馈电压回到给定值为止。这时电动机进入稳定运行状态。
(2)稳定运行 这时电动机的转速等于给定转速,ΔU=0。但由于速度调节器ST的积分作用,其输出不为零,大小由负载决定,此值也就是电流调节器LT的给定,它和电流反馈电压之差为零。同样由于LT的积分作用,其输出稳定在某一个数值。
(3)突加负载时的运行状态 当负载突然增加时,转速n下降,速度调节器ST的输入之差ΔU>0,ST的输出(即LT的给定)增加,整流电压增加,电动机转速回升,直到速度反馈电压重新等于速度给定电压为止。这时的电流给定对应于新的负载电流,系统又处于新的稳定状态。
(4)零点漂移问题 速度调节器ST和电流调节器LT都是静态放大倍数的放大器,零点漂移问题较为严重。为了克服这个问题,在ST的输出端和阻容反馈之间,增加了一个常闭触点K1。在停车时,K1闭合,ST的放大倍数为1,在环境温度为-6~60℃的范围内,性能十分稳定,始终保持零输出。当电动机启动及运行时,K1又断开,ST又正常工作。
(5)停车时的保护 对于电流调节器LT,要求它在停车时的输出处于负向限幅值,因此,在其输入端9和正电源之间增加了常闭触点K2。在停车时,K2闭合,在正的输入电压作用下,LT的输出偏在负向限幅值,这时对应的触发脉冲处于βmin=30°的位置,系统被可靠地封锁住。当启动或运行时,K2断开,LT又恢复正常工作。
(6)速度超调问题由于ST的积分作用,在启动过程中,当Ufn>Ugn时,引起转速超调,这对机床是不利的。为了解决超调问题,在ST的输入端增设了电容C1和电阻R1,构成了速度微分反馈。由于在启动过程中速度反馈电压不断对电容C1充电,因此在C1和R1中有充电电流,这一附加输出使Ufn还没有上升到速度给定电压,ST的输出就提前下降了。如果适当选择C1和R1的参数可以使Ufn上升到等于给定电压,此时ST的输出正好下降到等于平衡负载电流所需要的值,这样就消除了速度超调。
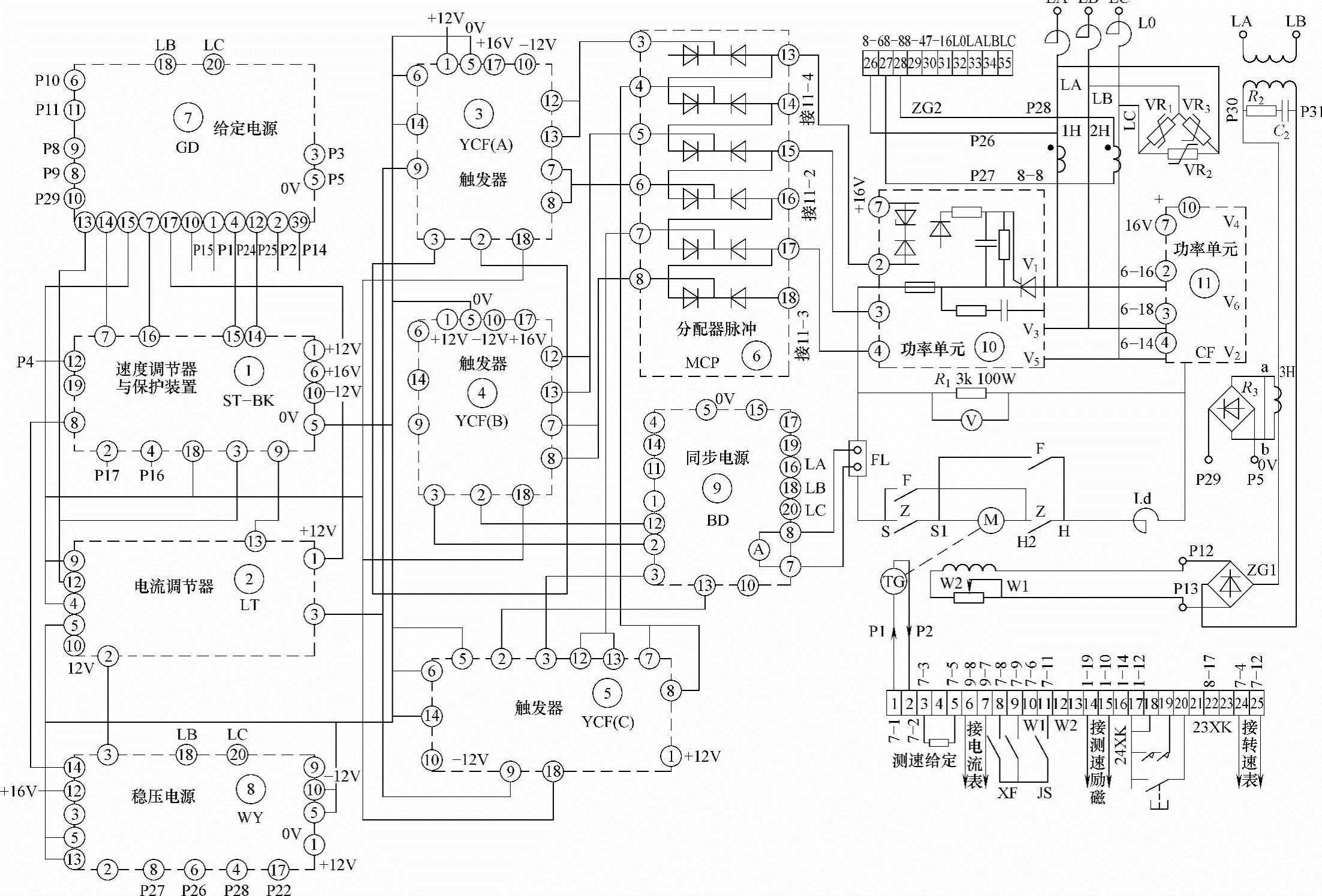
图5-72 T6216C落地镗床电气控制原理总图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。