



机构的扩展是指在原始机构的基础上,增加构件与之相适应的运动副,用以改变机构的工作性能或开发新功能。
1.引入虚约束
图3-50a所示的转动导杆机构可以传递非匀速转动,若将导杆的摆动中心C置于曲柄的活动铰链B的轨迹圆上,则导杆CB做等速转动,其角速度为曲柄AB角速度的一半,见图3-50b。但这种机构运动到极限位置时将会出现运动不确定的情况,为了消除运动不确定性,采取机构扩展的方法,加入第二个滑块,并将导杆设计成十字槽形的圆盘,见图3-50c,双臂曲柄两端滑块在十字槽中运动,圆盘和转臂绕各自的固定轴转动,由于是低副运动,可以实现较大载荷的传动,并且噪声低。串联两种这样的机构就可以获得1∶4的无声传动。但在引入虚约束时必须注意符合虚约束尺寸条件。
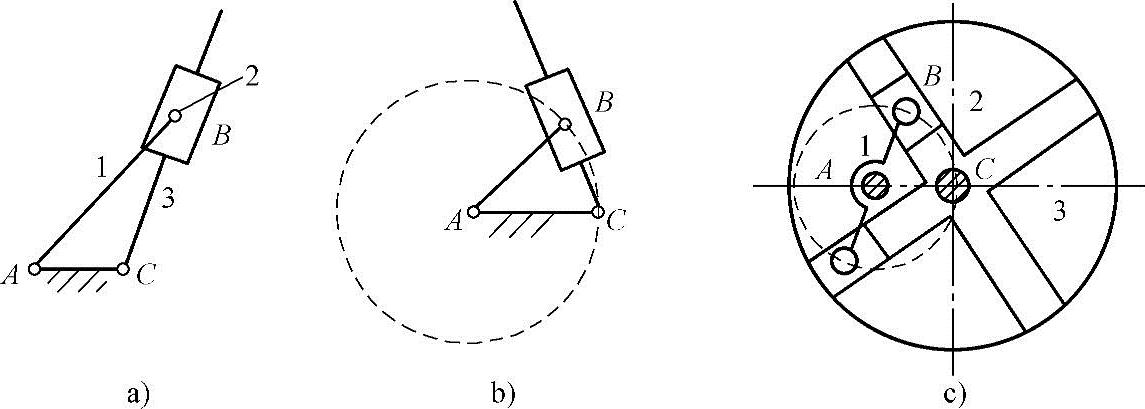
图3-50 无声传动机构
2.变换运动副
变换运动副的形状以适应机构扩展而引入虚约束。图3-51所示的三种凸轮机构具有明显的增程效果,机构的压力角没有增大,机构的尺寸也没有增大,而是利用凸轮的对称结构形状,增加从动件的同时改变凸轮固定转动副的性质所获得的。其中图3-51a是在凸轮轴上采用导向键连接,变转动副为圆柱副,增加了自由度,消除了因增加的从动滚子而带来的过约束;图3-51b和图3-51c可以看成是导向键的变异结构。
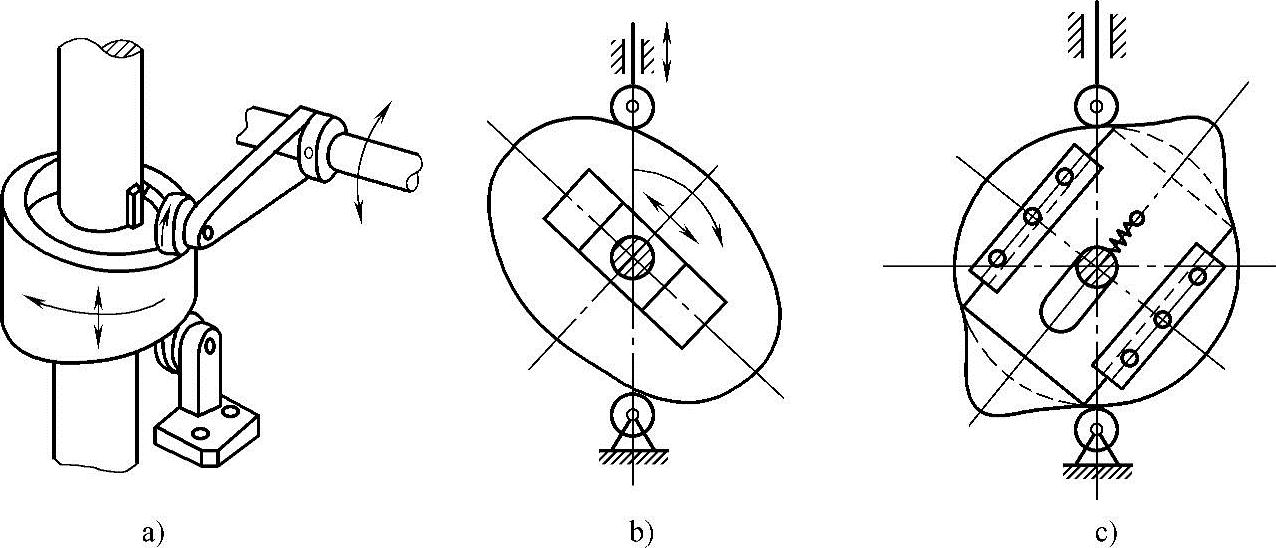
图3-51 增程凸轮机构
3.增加辅助机构
图3-52为可变廓线的凸轮机构,凸轮上装有4个具有弧槽的廓线片,每一片都可以根据设计需要旋转,然后通过弧槽内的螺钉固定,可以实现不同的运动规律。
同样,棘轮机构可以通过增加棘轮罩改变输出的摆角;在连杆机构中也常常增加辅助机构来调节杆长,以实现不同的运动规律。
4.机构的倒置
机构的倒置包括机架的变换与主动构件的变换。按照相对运动原理,倒置后的机构各构件相对运动关系并不改变,但可以改变输出构件的运动规律,以满足不同的功能要求;还可以简化机构运动与动力分析的方法,使机构设计与分析变得简单。
(1)平面连杆机构 在机械原理课程中介绍过由铰链四杆机构的机架变换可以生成曲柄摇杆机构,双曲柄机构与双摇杆机构,如图3-53a所示;由含有一个移动副的四杆机构的机架变换可以生成曲柄滑块机构、转(摆)动导杆机构、曲柄摇块机构、定块机构,如图3-53b所示;由含有两个移动副的四杆机构的机架变换可以生成双滑块机构、双转块机构、正弦机构、正切机构,如图3-53c所示。
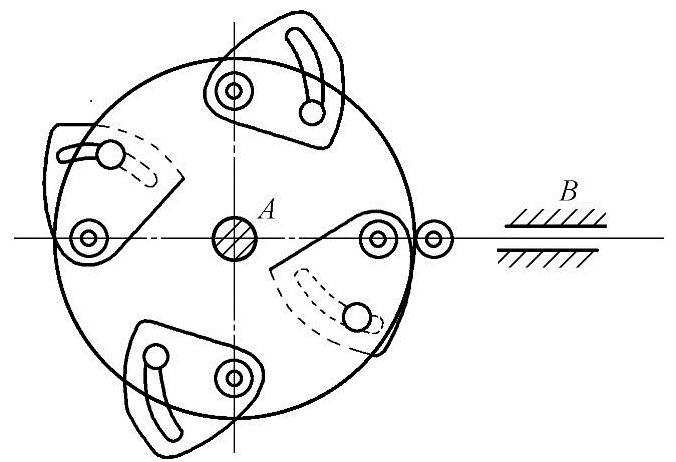
图3-52 可变廓线的凸轮机构
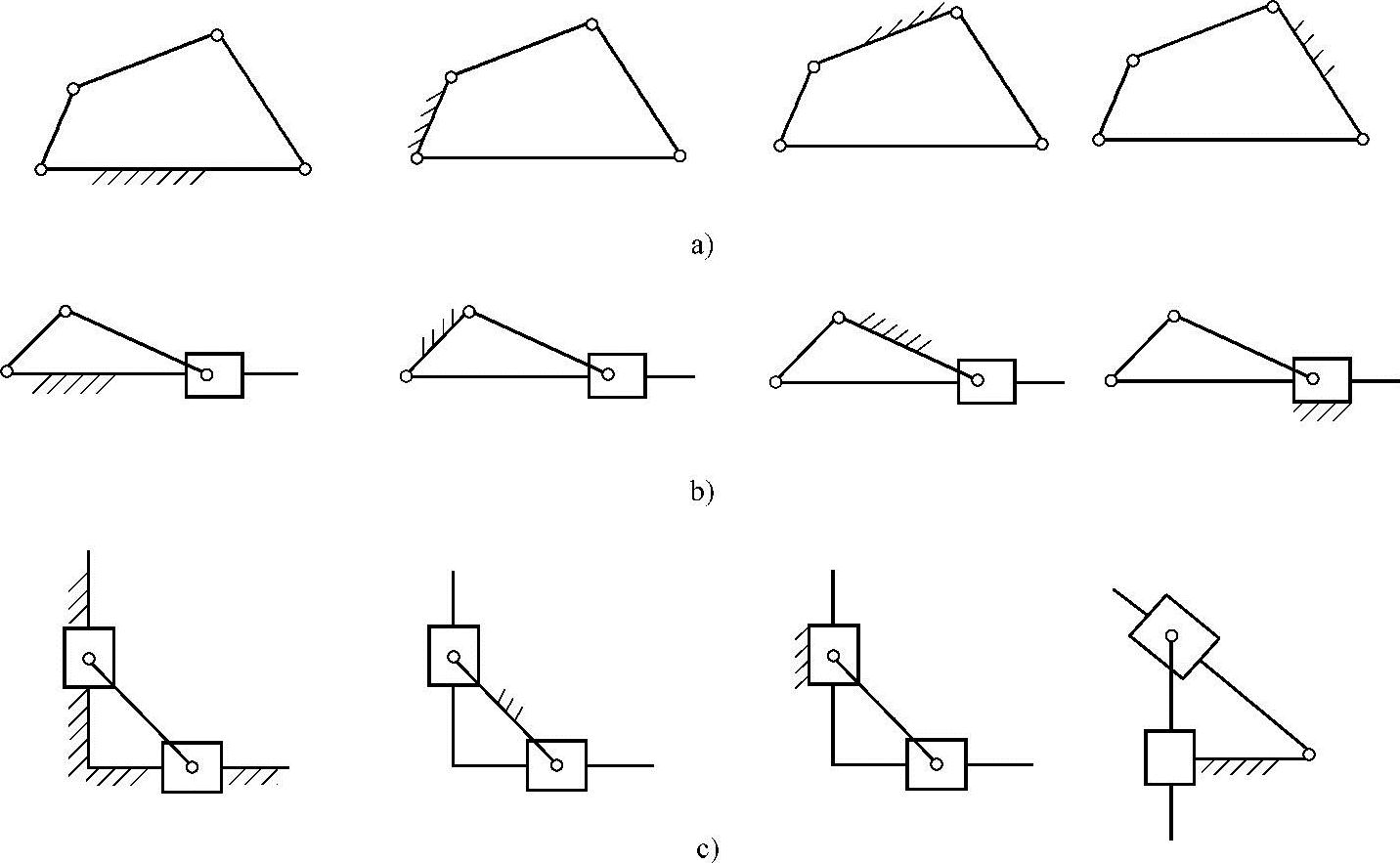
图3-53 平面四杆机构的机架变换
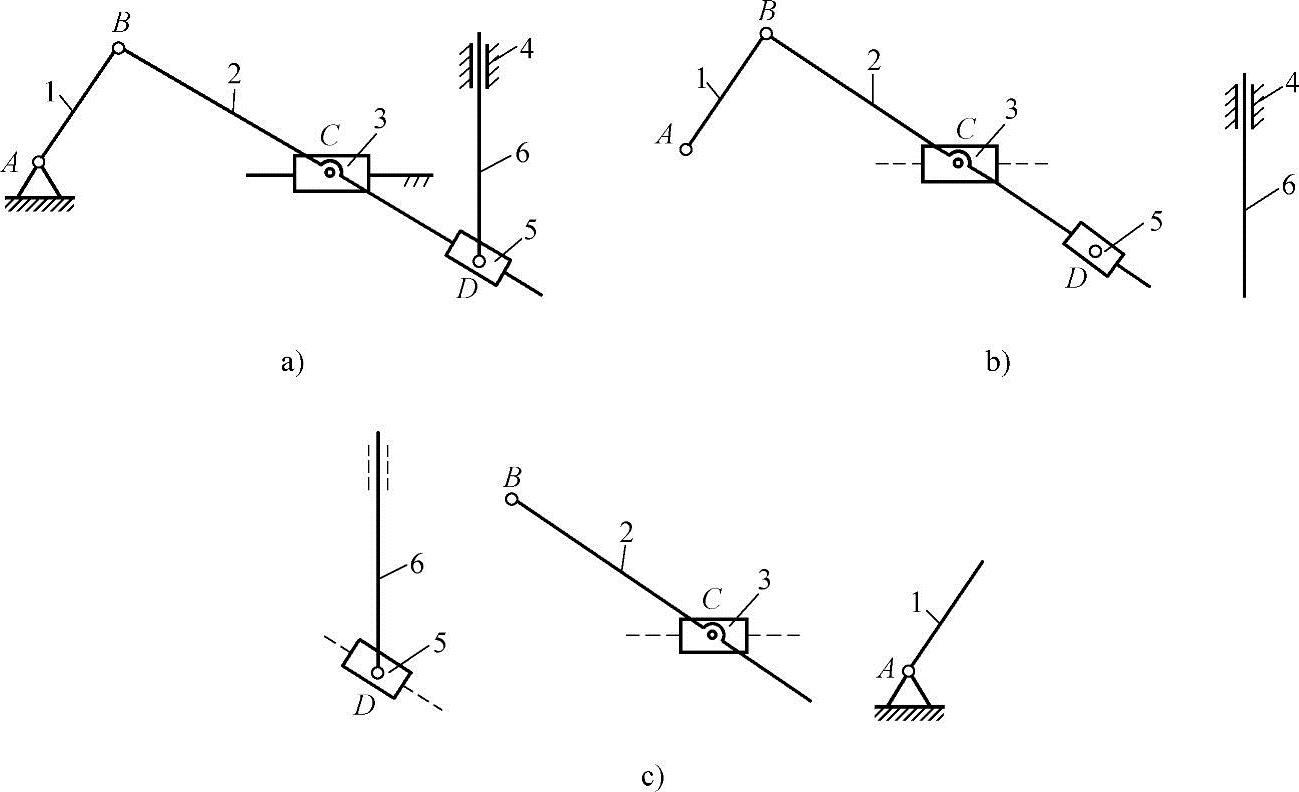
在图3-54a所示的六杆机构中,若以6杆为主动构件,则机构为Ⅲ级机构,如图3-54b所示;若以1杆为主动构件,则机构为Ⅱ级机构,如图3-54c所示。为简化运动与动力分析过程,常采用变换主动构件方法,将Ⅲ级机构转换为Ⅱ级机构进行分析,求出相对运动关系及其参数值,再确定所求的绝对运动或动力参数值。
 (https://www.xing528.com)
(https://www.xing528.com)
图3-54 变换主动件
1、2、6—杆 3、5—滑块 4—固定套筒
(2)凸轮机构 凸轮机构为三构件高副机构,三个构件分别是凸轮、推杆(或摆杆)、连接凸轮与推杆的二副杆(或机架)。以摆动从动件盘形凸轮机构为例。一般常用的工作形式如图3-55a所示,凸轮1为主动件,摆杆2从动件;如果对主动件进行变换,摆杆2为主动件,则生成了如图3-55b所示的反凸轮机构;如果对机架进行变换,构件2为机架,构件3为主动件,则生成了如图3-55c所示的浮动凸轮机构;或凸轮固定,构件3主动,则生成了固定凸轮机构。

图3-55 凸轮机构的倒置
1—凸轮 2—摆杆 3—构件
图3-56是反凸轮机构的应用,推杆1主动,做往复移动;凸轮2从动,做间歇转动。当杆1从图示位置向左移动时,右侧滚子使凸轮做逆时针转动。当杆1移动到左极限位置时,凸轮左侧齿尖越过左侧滚子。而推杆1再向右移动时,左侧滚子就进入齿间继续推动凸轮逆时针转动。
图3-57是固定凸轮机构的应用。圆柱凸轮1固定,在其沟槽内安置从动件2上的小滚子C,构件2与主动件3组成移动副。当构件3绕固定轴A转动时,构件2在随构件3转动的同时,还按特定的运动规律沿移动副B移动。
(3)其他传动机构
齿轮传动机构机架变换后就形成了行星齿轮机构,如图3-58a所示;齿形带或链传动等挠性传动机构机架变换后生成各类行星传动机构,如图3-58b所示。
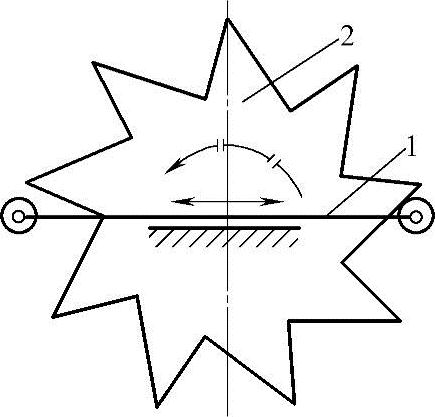
图3-56 反凸轮机构的应用
1—推杆 2—凸轮
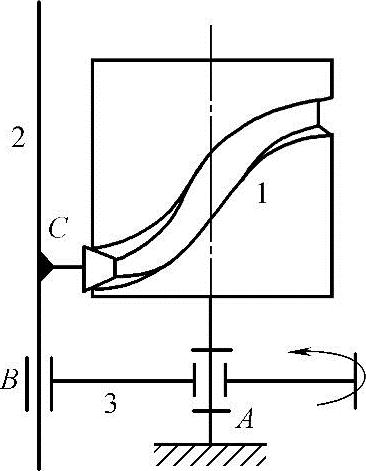
图3-57 固定凸轮机构的应用
1—圆柱凸轮 2—从动件 3—主动件

图3-58 齿轮与挠性件传动机构的机架变换
图3-59所示的是一个用于清洗汽车玻璃窗的挠性件行星传动机构。其中挠性件1连接固定带轮4和行星带轮3,转臂2的运动由连杆5传入。当转臂2摆动时,与行星轮3固接的杆a及其上的刷子做复杂平面运动,实现清洗工作要求。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。