



联轴器连接两轴,并在两轴间传递转矩,两轴之问的不同连接方式可以构成不同的联轴器类型。
刚性联轴器在两轴之间构成刚性连接。图4-10所示的凸缘联轴器和套筒联轴器就是刚性联轴器。刚性联轴器具有较强的承载能力,但是对所连接的两轴之间的位置精度有较高的要求。
为了使联轴器可以适应所连接两轴之间存在的位置及方向误差,可以将联轴器分解为两个分别安装在所连接两轴端的半联轴器,将两个半联轴器通过弹性元件相连接,构成有弹性元件的挠性联轴器。由于不同材料在性能上的差别,选用不同弹性元件材料对联轴器的工作性能也有很大的影响。可选做弹性元件的材料有金属、橡胶、尼龙等。金属材料具有较高的强度、刚度和寿命,所以常用在要求承载能力大的场合;非金属材料的弹性变形范围大,载荷与变形的关系非线性,可用简单的形状实现较大变形量,但是非金属材料的强度差,寿命短,常用在要求承载能力较小的场合。由于弹性元件的寿命短,使用中需要多次更换弹性元件,在结构设计中应为更换弹性元件提供可能和方便,应为更换弹性元件留有必要的操作空间,应使更换弹性元件所必须拆卸、移动的零件数量尽量少。图4-11表示了使用不同弹性元件材料的有弹性元件挠性联轴器的结构。
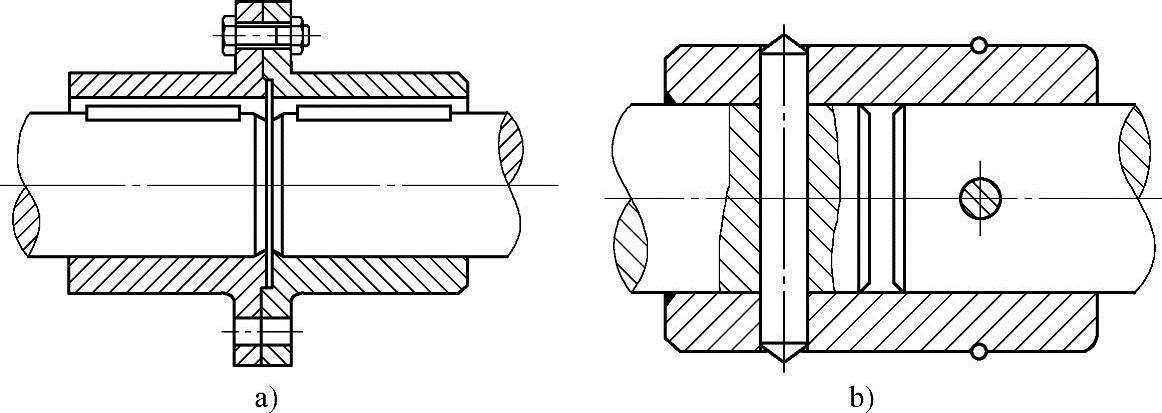
图4-10 刚性联轴器
a)凸缘联轴器 b)套筒联轴器
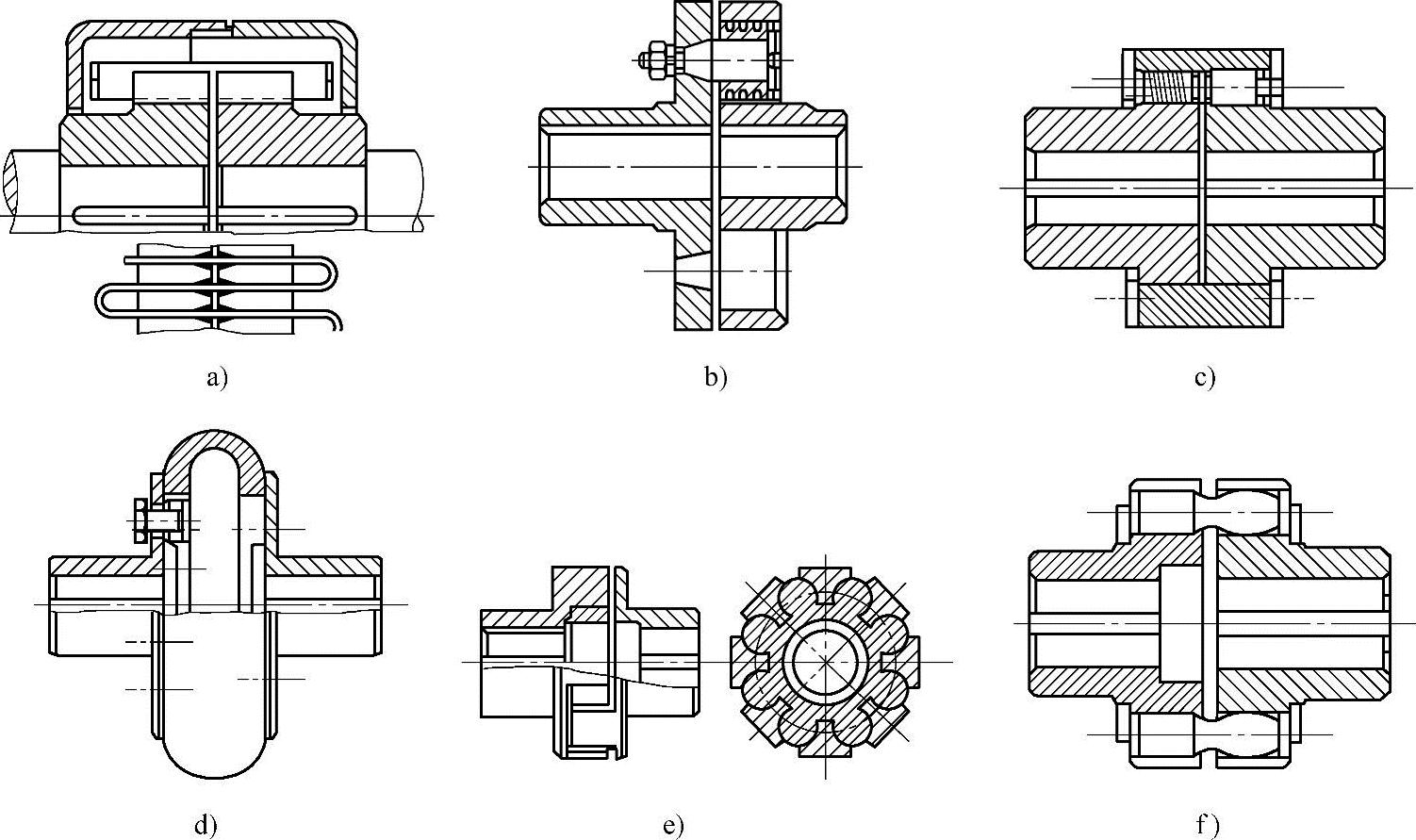
图4-11 有弹性元件的挠性联轴器
a)蛇形弹簧联轴器 b)弹性套柱销联轴器 c)弹性柱销齿式联轴器 d)轮胎联轴器 e)梅花形弹性联轴器 f)弹性销联轴器
可以将两个半联轴器用特定运动副连接,使两个半联轴器之间具有某些运动自由度,使联轴器可以适应所连接两轴之间存在的位置及方向误差。
图4-12所示的万向联轴器通过两组正交的铰链连接两个半联轴器,使联轴器具有调整两轴角度误差的能力。
图4-13所示的十字滑块联轴器通过半联轴器1、3与中间凸隼之间两个移动副连接两个轴,可以适应两轴之间的径向位置误差。
图4-14所示的平行轴联轴器用连杆通过两组平行铰链连接两个半联轴器,使两个半联轴器之间具有两个方向的移动自由度,适应两轴之间的径向位置误差。
图4-15所示的双万向联轴器将两个万向联轴器通过移动花键连接,可以适应两轴之间任意方向的角度误差和位置误差。
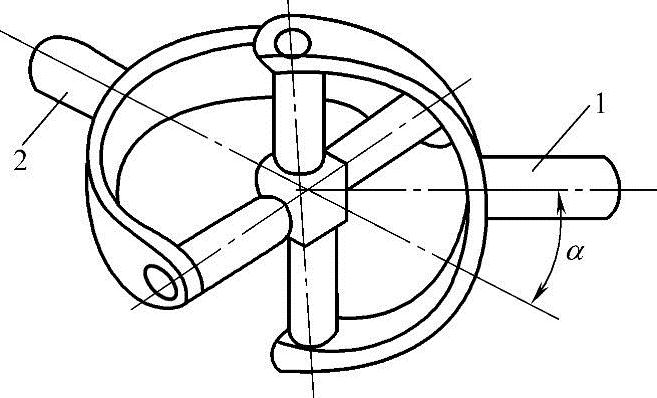
图4-12 万向联轴器
1、2—半联轴器(https://www.xing528.com)
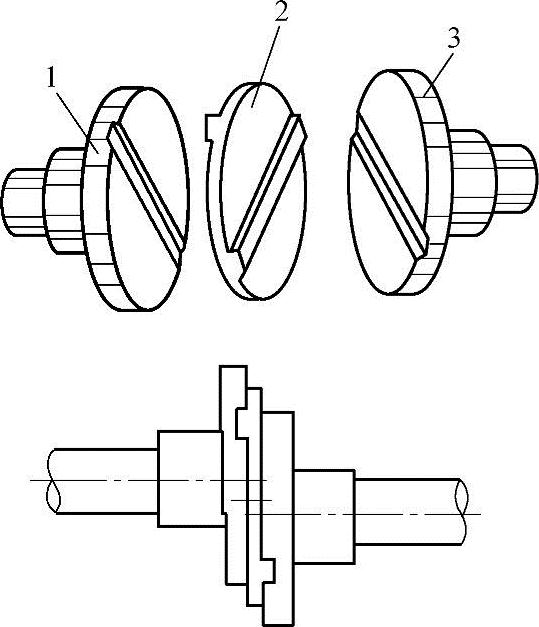
图4-13 十字滑块联轴器
1、3—半联轴器 2—凸隼
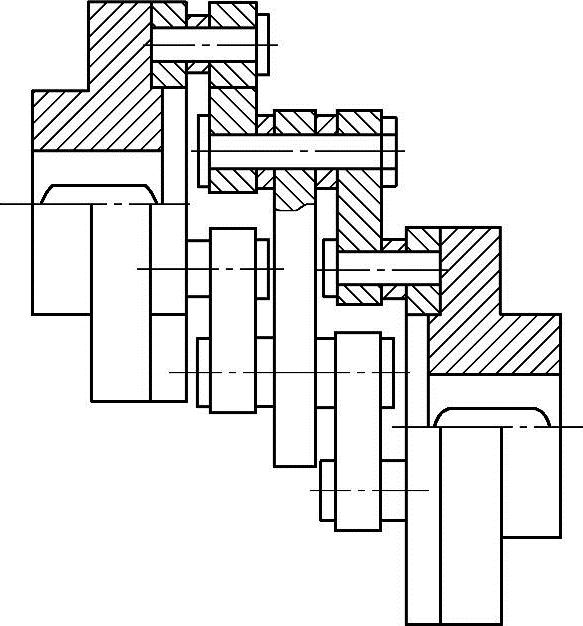
图4-14 平行轴联轴器
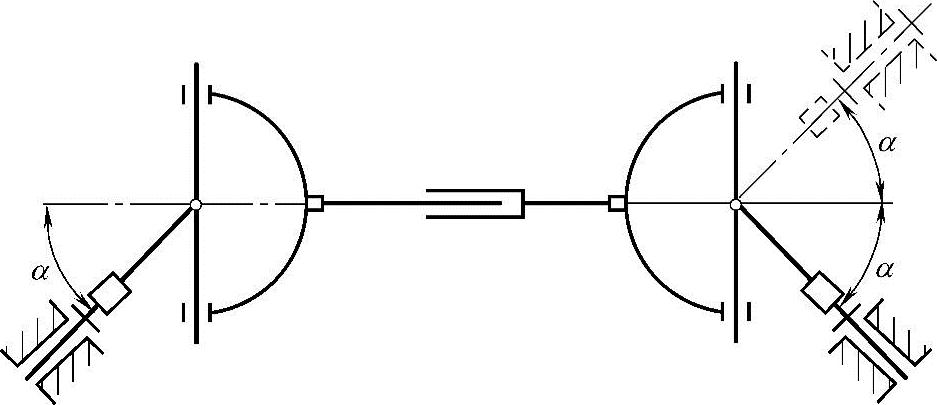
图4-15 双万向联轴器
图4-16所示的鼓形齿式联轴器的两端通过鼓形外齿轮与内齿轮啮合,使得联轴器可以适应所连接两轴之间任意方向的误差。
图4-17所示的液力耦合器通过充满其中的液体连接泵轮和涡轮,泵轮在输入轴的带动下转动,并通过腔内的叶片将输入的能量转变为液体的动能,液体通过涡轮腔内的叶片推动涡轮转动,通过涡轮所连接的输出轴对外做功输出能量。
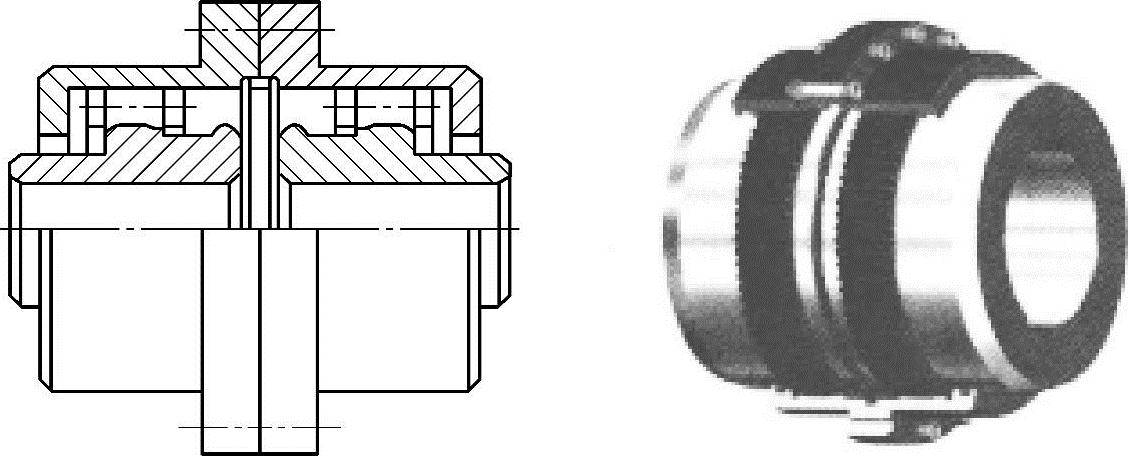
图4-16 鼓形齿式联轴器
图4-18所示的钢球碰撞联轴器的工作原理与液力耦合器相似,只是把工作介质换为钢球,通过钢球在主动半联轴器和被动半联轴器叶片之间的碰撞在两个半联轴器之间传递动力。如果用电场、磁场、气体或松散物质替换其中的工作介质,就可以派生出其他类型的联轴器。
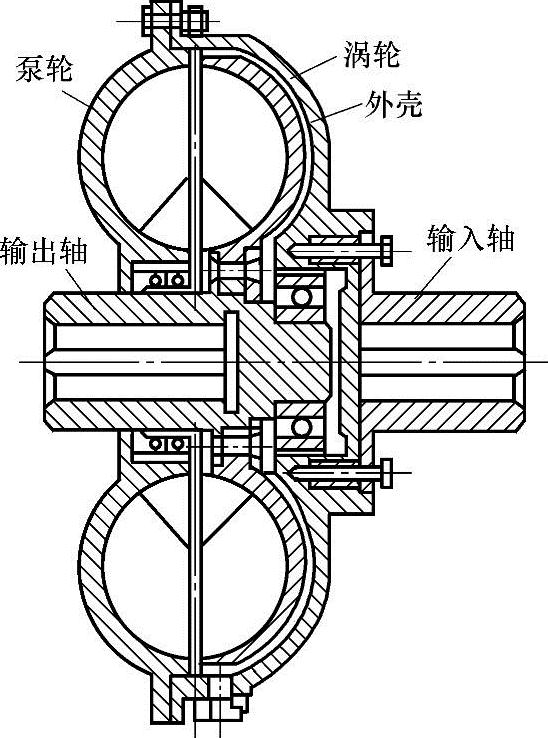
图4-17 液力耦合器
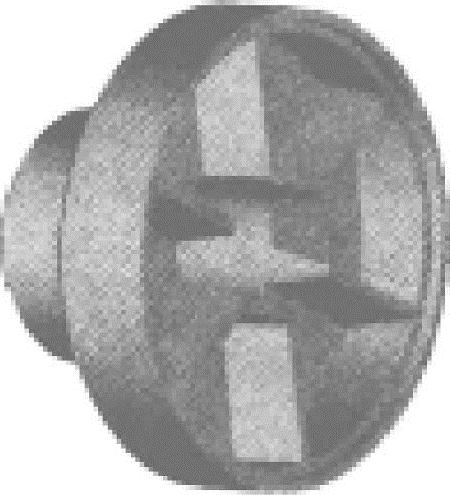
图4-18 钢球碰撞联轴器(半联轴器)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。