



1.自适应控制的定义与分类
自适应控制是不论外界发生巨大变化或系统产生不确定性,控制系统能自行调整参数或产生控制作用,使系统仍能按某一性能指标运行在最佳状态的一种控制方法。
自适应控制分为自校正控制(STC)和模型参考自适应(MRAC)控制。
自校正控制基于对被控对象数学模型的在线辨识,然后按给定的性能指标在线综合最优控制的规律。它与一般确定性或随机性最优控制的差别是增加了被控对象的在线辨识任务,它是系统模型在不确定情况下的最优控制问题的延伸。
模型参考自适应控制需要在控制系统中设置一个参考模型,要求系统在运行过程中的动态响应与参考模型的动态响应一致、状态一致或输出一致。当出现误差对,便将误差信号输入给参数自调节装置,来改变控制器参数或产生等效的附加控制作用,使误差逐步趋于消失。
2.神经网络自适应控制
神经网络自适应控制系统是基于自适应的基本原理、神经网络的基本特点和基本理论设计而成的,是两者的结合。目前,线性系统的自适应控制问题已基本解决,但非线性系统的自适应控制还存在很多难点。而神经网络因其学习能力和非线性特性,在这方面所具有的潜力,可以简化单纯自适应控制系统设计的复杂性,发挥了自适应与神经网络的各自长处,非常适于非线性系统的自适应控制。
神经网络自适应控制本质上是基于神经网络理论的自校正控制或模型参考自适应控制,就是说神经网络自适应控制也可分为两类:神经网络自校正控制和神经网络模型参考自适应控制。
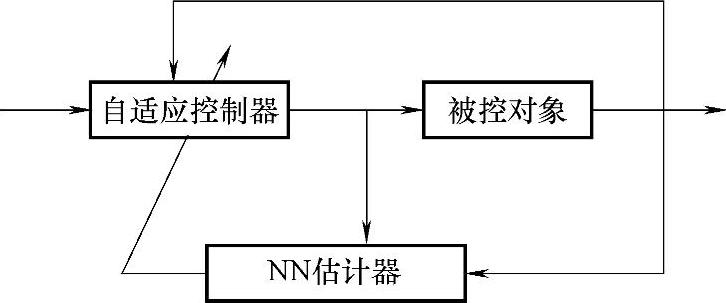
神经网络自校正控制根据系统正向或逆模型辨别结果,直接按自适应规律调节控制器的参数,使系统满足既定的性能指标。如图4-21所示,系统由常规自适应控制器和神经网络(NN)估计器组成,此种离线辨识的神经网络估计器需要足够高的建模精度。
 (https://www.xing528.com)
(https://www.xing528.com)
图4-21 神经网络自校正控制自适应控制
神经网络模型参考自适应控制又分为直接控制和间接控制两种,直接控制的神经网络模型参考自适应控制如图4-22所示,由参考模型、神经网经控制器(NNC)和被控对象组成,神经网络控制器根据误差调节参数。间接控制的神经网络模型参考自适应控制如图4-23所示,增加了一个神经网络,非线性系统即被控制对象,说明具有非线性性质,网络控制器可以在线修正。
模型参考自适应闭环控制系统的期望性能用一个稳定而优良的参考模型来描述,其控制目标是使被控制对象的输出响应y(t)渐近地趋于参考模型的输出响应y2(t),即

式中 E——给定小正数。

图4-22 直接控制的模型参考神经网络自适应控制
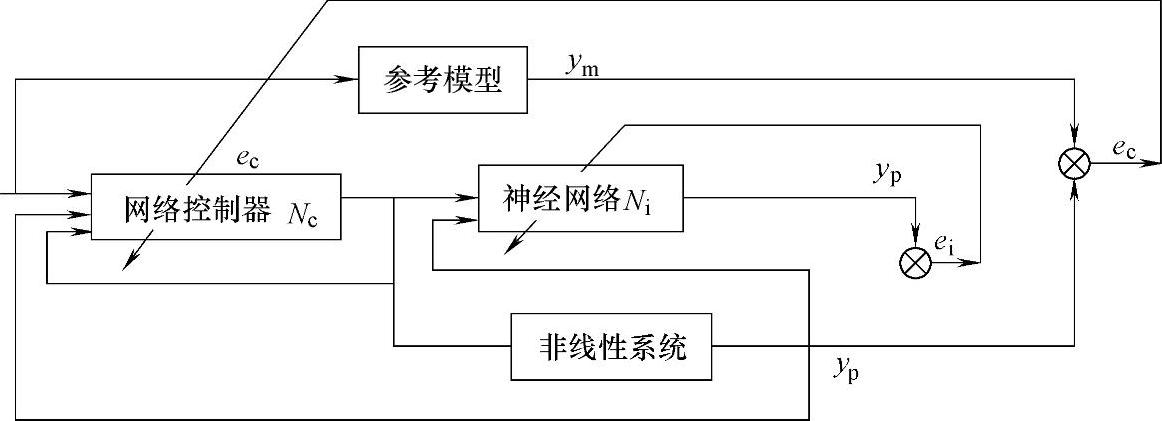
图4-23 间接控制的神经网络模型参考自适应控制
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。