



注塑机作为注塑制品的生产机械已被广泛使用。随着新型塑料的不断产生及对注塑制品质量要求的不断提高,提高注塑机本身的性能与精度已势在必行。随着自动化和计算机控制技术在注塑机上的应用,使智能控制注塑工艺过程的各参数达到最佳已成为可能。随着塑料工业的发展,日本和德国等国家相继推出了注塑机群控系统。这种方式可以保证注塑制品的精度,将最优工艺条件存储在计算机中,从而保证每一批注塑制品的质量,实现由单台注塑机控制向车间自动化管理发展。本方案针对目前大量使用的普通注塑机的特点,使用一台PC作为上位机,将数台注塑机作为下位机以实现注塑机的智能监控。该系统具有多功能人机接口,能存取数据,以各种画面显示注塑机参数、控制变量、不同制品的成型条件、异常情况等特点,在此基础上,进一步实现注塑工艺过程参数的自适应控制和制品质量控制,从而实现对多台注塑机的集中监督和管理。
1.智能监控系统的组成与主要功能
注塑机智能监控系统的结构,从功能上总体可分为基础控制级、过程监控级(上、下位机)两层。其中,基础控制层把逻辑控制、顺序控制和回路控制集成在一起进行控制,构成了整个自控系统的基础自动化部分,主要具有数据采集、通信、温度控制、数据存储、顺序控制等5个功能;过程监控层在基础控制系统的基础上,实现控制量输入、注塑工艺流程监视、工况显示、各种参数调节、数据处理、绘制实时曲线、存储历史数据、报警状态监视等功能,并提供友好的人机界面,将人与计算机结合起来,实现人对过程的干预和人与计算机的集成。本系统主要实现的是过程监控。智能监控系统的流程如图8-25所示。
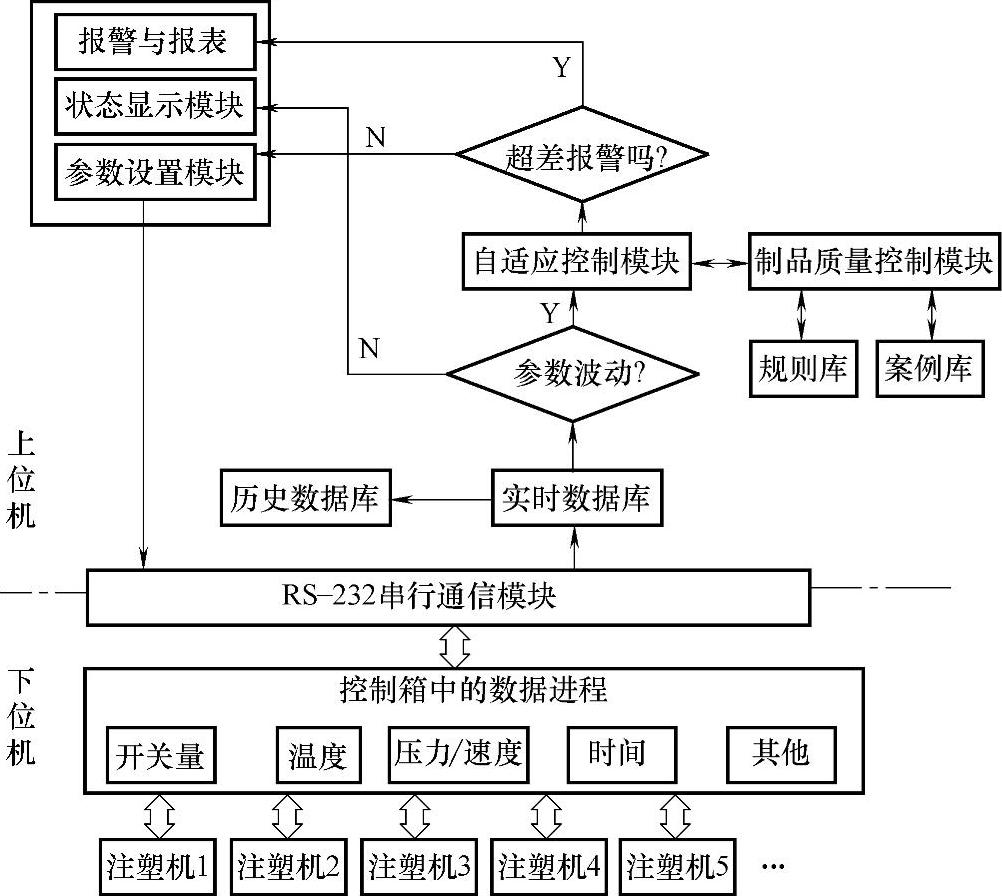
图8-25 智能监控系统的流程
智能监控系统上/下位机主要功能模块如下:
1)参数设置模块:根据不同的注塑制品要求,设置不同的初始化参数,对注塑机进行控制。
2)状态显示模块:显示设备的运行状态和各检测量的数值,虚拟注塑机的动作过程,利用智能仪表控件实时直观地显示各检测变量,通过状态指示灯显示开关量和报警。
3)数据管理模块:管理和维护系统的数据库,包括数据记录的增加、删除、修改和查询等功能。数据库作为系统数据记录的载体,记载的不仅是状态检测的重要数据,而且也是故障诊断的重要依据,要将从数据采集组件传来的实时数据及设备运行次数、故障时间、故障现象、故障原因、故障次数等数据存入库中,方便用户进行管理。
4)数据库接口组件:在注塑机监控系统中,多个功能模块都需要对数据库进行频繁的操作,每个模块对数据库的操作都可以通过数据库接口实现,以方便对数据库的使用和维护。
5)自适应控制模块:针对不同的制品缺陷修改一定的参数,如修改注塑压力或者注射温度等,最终提出制品缺陷和故障的优化改进措施。
6)制品质量控制模块:实现注塑机监控系统的案例库和规则库,利用已有的故障案例和缺陷分析案例找出故障点,提出诊断方案,以便及时排除故障,或者修改某个成型工艺参数来达到使制品完善的目的。
7)实时通信模块:实现数据采集与实时监控组件的数据通信,数据的传递要及时、准确。
8)下位机模块:采集注塑机上的热电偶、电流表、电子位置尺、液位计、液压马达、行程开关等模拟量和数字量,为上位机提供数据,并能及时响应上位机发出的控制命令。
2.注塑机智能监控系统的关键技术
(1)监控系统人机界面的设计
1)监控系统上位机主界面的设计。根据注塑机的工艺流程,利用VC++和MFC的强大功能编制注塑机监控界面,其组成如图8-26所示。监控界面上,注塑机系统的物理量有温度、压力、流量、速度、位移等。这些物理量在监控界面上通过采用ActiveX技术来实现。在用于ActiveX开发的所有工具中,MFC是功能强大且应用简便的一个,它提供了对应用程序开发大有益处的两个向导,即AppWizard和ClassWizard。按照面向对象思想,通过对控制对象进行类的合理抽象,该方案将其分为模拟量与数字量两个动态元素类及模拟界面的静态元素类。其中动态元素类需要根据现场数据实时改变其数值、外观显示等属性,而静态元素类的外观不需要实时改变,通过定时器和仪表指示图标的使用,显示参数的实时变化和对注塑过程的实时监控。
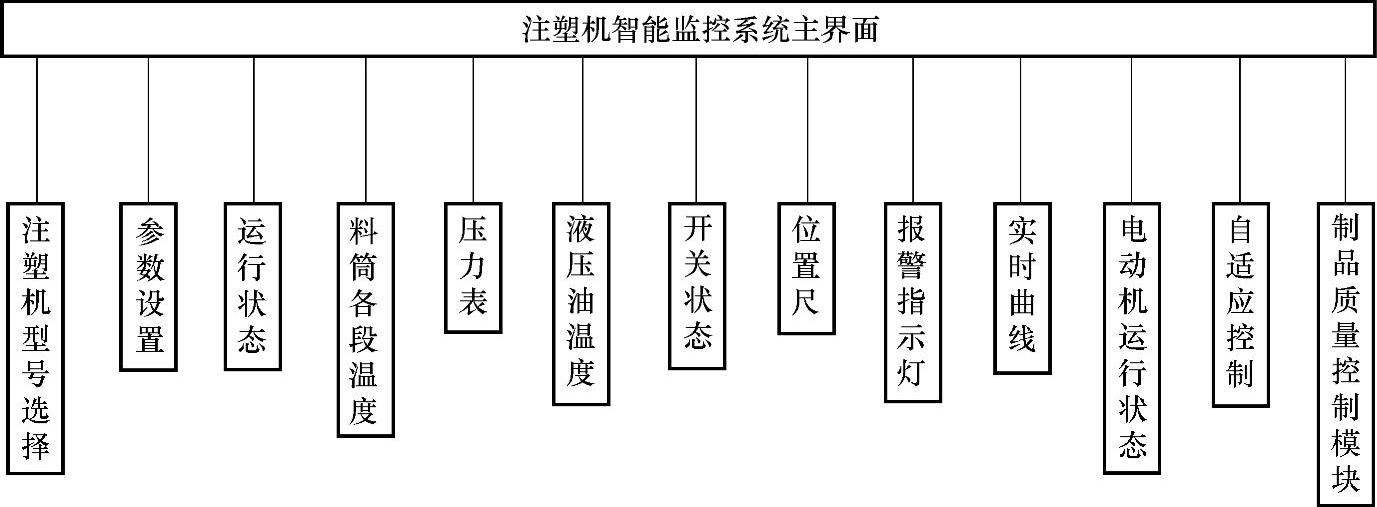
图8-26 注塑机监控界面组成
2)注塑过程工艺参数自适应控制与制品质量控制。本智能系统利用一个优化的BP神经网络,建立一个计算质量指标的数学控制模型,通过正交实验的现场数据和方差分析技术确定自适应控制参数的调整顺序,作为自适应模型的动态规则;通过研究专家知识和经验知识确定参数调整的变化方向,作为自适应模型的经验规则,从而实现对注塑制品成型过程工艺参数的实时智能控制。
注塑制品的质量与注塑过程工艺参数值的选择密切相关。当工艺过程中的各参数可以实现精确控制后,合理选定不同塑料在不同条件下的最佳工艺参数值,是保证制品质量的重要环节。为此,该智能系统应用Moldflow大型塑料仿真计算软件,得到制品结构特征变化时,各种塑料在注射成型过程中的最佳工艺参数的变化规律,由此建立各种注塑制品结构特征与最佳工艺参数值匹配的工艺数据库。依此数据库,只要输入制品的特定材料及特定结构特征,控制系统就能自给定相应的最佳工艺参数。考虑到实际使用条件与工艺数据库开发计算条件之间存在的各种差异,建立了依据制品缺陷对工艺参数自适应的模糊控制规则。系统工作时,只要配上制品缺陷检测手段或人机对话,就可以保证系统自动修正工艺参数给定值,以达到最优状态。
3)数据库技术在监控系统中的应用。在注塑机智能监控系统中,多个功能模块都需要对数据库进行频繁的操作,每个模块对数据库的操作都可以通过数据库接口实现,以方便对数据库的使用和维护。为了将用户所作的每次参数设定保存下来,需要采用数据库技术。该智能系统通过监控实时数据库来进行注塑机历史优化数据的存储与检索、注塑机故障报警的处理与存储、数据的运算处理、I/O数据连接。图形界面系统I/O驱动程序等以监控实时数据库为核心,通过高效的内部协议相互通信,共享数据,达到工艺初始化参数的传输、调整、接收过程,实现监控系统内部模块的关联性。
(2)串行通信技术
1)PLC的参数设置。PLC在通信之前必须对它的系统寄存器进行设置。PLC与PC的数据通信一般采用自由断口通信模式,参数设置的波特率为9600bit/s,每个字符为8位数据位,无奇偶效验,停止位为1。
2)通信协议的编制:注塑机的通信协议与其要实现的功能密不可分,规定好协议要实现的功能集合可减轻协议设计的复杂程度,最大限度地降低系统成本,提高系统的可靠性。总结实际用户对注塑机控制系统设计的基本要求及分析系统的硬件结构,注塑机通信协议要实现的功能有下列几点:
① 传输模具资料监控中心可任意跟踪单个或多个移动目标,同时设定目标巡检周期。(https://www.xing528.com)
② 监控工序状态。遇到异常情况时可向监控中心报警,中心锁定并跟踪该目标直到解除报警。
③ 监控参数。监控中心可以向监控目标发送预定义的指令,指示移动目标完成特定操作。
④ 监控系统I/O变化。
根据用户层协议要求的不同,编制的格式可以有适当的调整,通信协议编制的格式为
$Y,XXXX,①,②,③,……∗h1h2<CR><LF>
其中,$为串头;Y为注塑机型号;XXXX为串名,一般为英文大写字母,表达温度、压力、时间等;①,②,③,……为数据字段,数字表示参数值;∗为星号,串尾;<CR>为回车控制符;<LF>为换行控制符;h1h2为$与∗之间所有字符代码的校验和。需要注意的是,校验和h1h2为半字节校验,h1表示高4位校验和;h2表示低4位校验和。
3)软件实现。注塑机控制系统中的上位机需要不断接收注塑现场采集到的各种状态量和数值量,并将命令发送到下位机,以实现对下位机的实时监控。上位机与下位机之间的数据交换就是通过串行RS-232通信模块来实现的。通过编写串口通信程序,实现串行数据的分离、动态存储和动态显示,实现一台注塑机所有信号都通过计算机处理的全闭环控制系统。一般情况下的串行通信通常可采用的3种方法为:①利用Windows的通信API函数;②利用VC++(或其他语言)的标准通信函数inp和outp;③利用MSComm控件。本程序采用的是Windows的通信API函数。
添加串口通信类CSerialPort
在应用程序中,利用CScrialPort类编写串口通信的程序,按如下步骤进行:
① 将类文件SerialPort.h和SerialPort.cpp复制到工程所在的文件夹中,然后单击VC菜单Project->Add to Project->Files...,将SerialPort.h和Se-rialPort.cpp添加到当前工程中;同时要包含该类的定义头文件“SerialPort.h”,手工添加#include“Serial-Pnrt.h”。
② 声明CSerialPort类的一个对象CSerialPort mSerialPort;调用m_Serial-Port.InitPort(……)函数对串行口进行初始化。
③ 打开串行口.m_SerialPort.StartMonitoring()。
④ 用函数AfxBeginThread(Comm1Thread,this)启动串口通信线程函数Com-mThread(…),即可立即对所定义的串口进行监听。
⑤ 发送数据m_SerialPort.WriteToPort(char∗s),调用发送函数向指定的串口发送用户数据,参数s即为待发送的数据。
⑥ 一旦串口接受缓冲区有数据到达,通过On-Comm(WPARAM ch,LPARAM port)进入接收数据过程,利用自定义消息与主应用程序进行通信接收,这样应用程序就可以对所接收的数据进行各种处理。
⑦ 关闭串口m_SerialPort.C1osePort()。
读写串口的控制流程
该智能系统为一台上位机与多台下位机通信。图8-27和图8-28分别是上位机与一台下位机的通信流程图。通信从上位机开始,上位机发送欲呼叫的下位机的联络地址、下位机要接收的数据包等。分机收到联络地址后,进入中断服务程序。如果该联络地址与本机不相符,则退出中断,继续执行原来的程序。若相符,就将联络地址回发给本机,并禁止串口中断,准备和PC通信。完成通信后,分机退出中断服务程序,继续执行原来的程序。
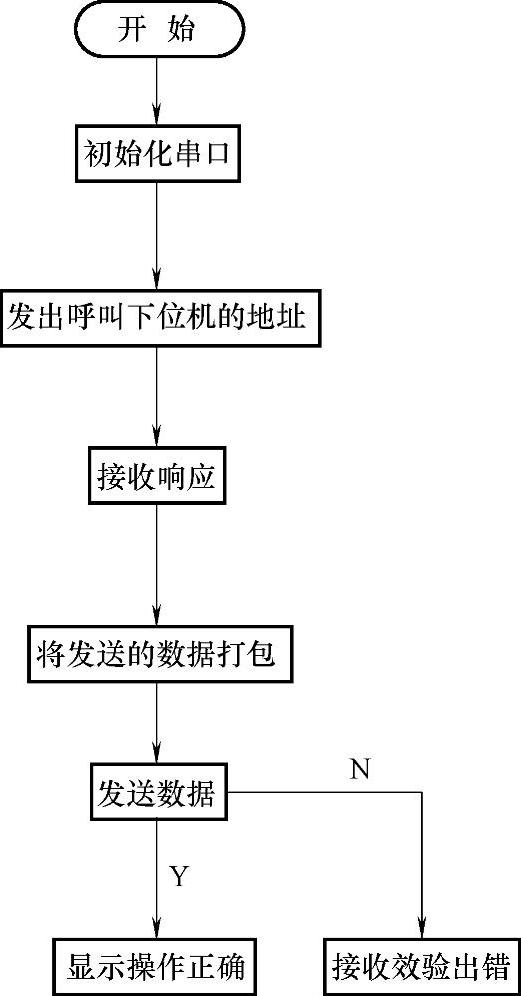
图8-27 上位机通信流程图
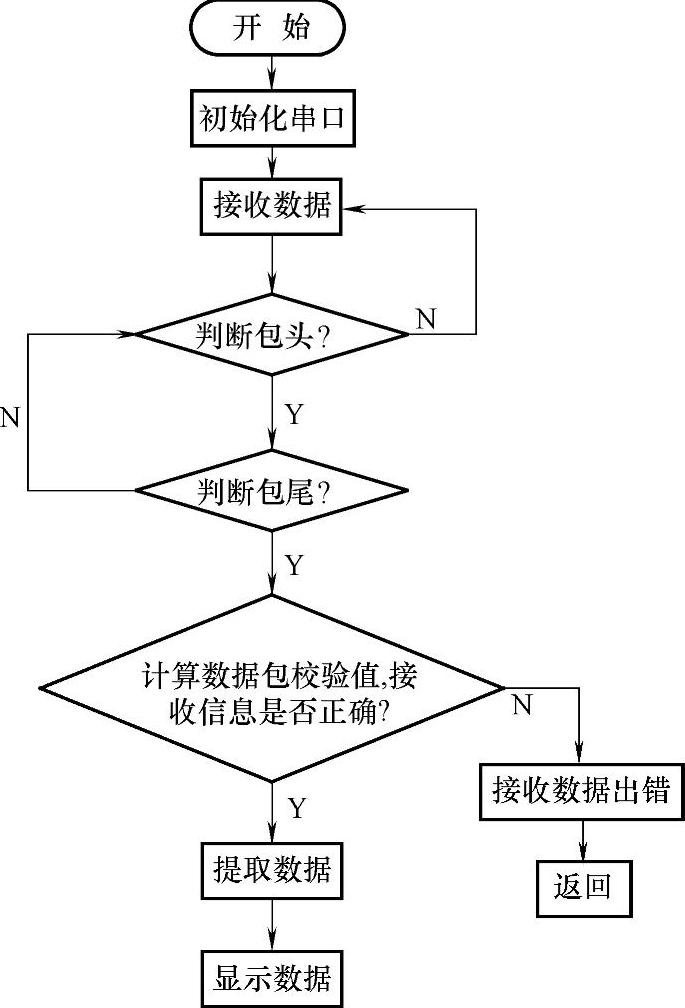
图8-28 下位机通信流程
3.结语
该智能监控系统使用一台PC作为上位机,多台注塑机作为下位机,实现了注射成型过程的全闭环控制。该智能监控系统实现了整个生产过程的实时控制,通过自适应控制模块和制品质量控制模块,使智能控制注塑工艺过程的各参数达到最佳,性能可靠稳定,降低了成本,减轻了劳动强度,达到了比较满意的结果。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。