



使用软起动器使电动机停止的方式有三种:自由停止、软停止和制动停止。
1.自由停止
这是最简单的工作方式,软起动器在接收到停止信号后,断开旁路接触器,并关断晶闸管,停止输出电压到电动机,电动机和负载在阻力矩的作用下自由停止,这是一种不受控的停止方式。
2.软停止
在电压控制形式下的软停止就是让电动机缓慢停下,如图16-35所示。对恒转矩负载TL,如果把电动机端电压从u1下调至u13,此时机械特性的最大转矩TBR3略小于负载转矩TL,转速一旦低于nBR,电动机便不能稳定运行,在负载转矩作用下停止。负载转矩与电磁转矩的差值随转速下降而逐渐增加。在此过程中,如果继续减少软起动器输出电压,就会获得更大的制动转矩,使电动机停止得更快。显然,电压斜坡控制方式并不能对电动机停止进行有效的控制。
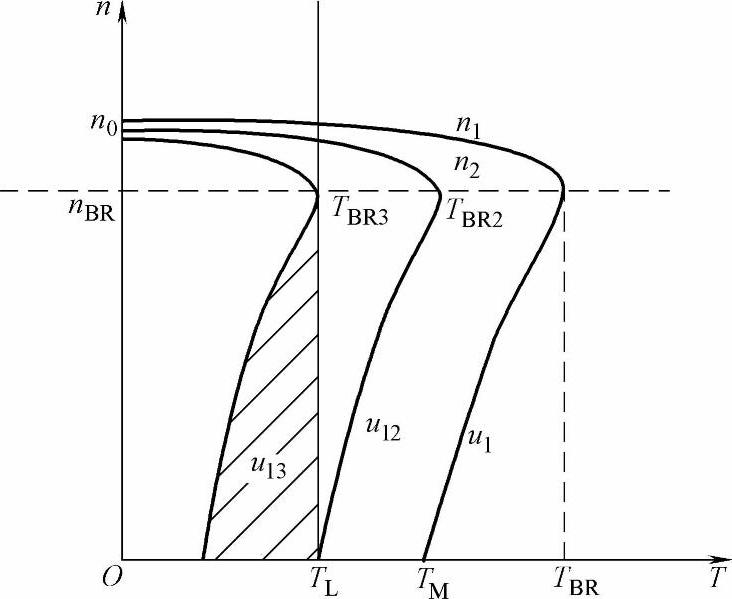
图16-35 异步电动机调压时的机械特性
对于泵负载,其转矩特性是抛物线形,所以电动机电压下降后的电动机转矩曲线与泵的转矩曲线有两个交点。图16-36中,电压为u13时,一个交点在nBR,另一个交点在n4。由于该点的负载转矩斜率小于电动机转矩斜率,所以泵可以在该点运行。也就是说,转速低于n4以后,需要对泵的转速进行有效控制,随着软起动器输出电压下降,泵的转速随之下降。
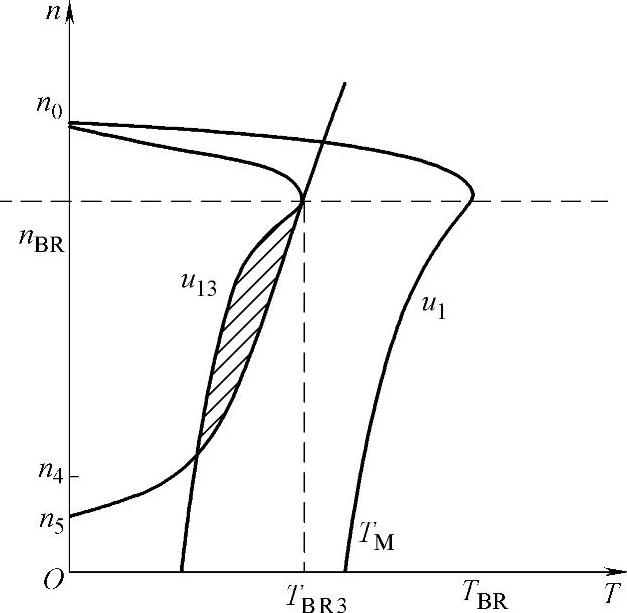
图16-36 异步电动机调压时的机械特性在泵类负载中的作用
软起动器在软停止时的输出电压曲线如图16-37所示。(https://www.xing528.com)
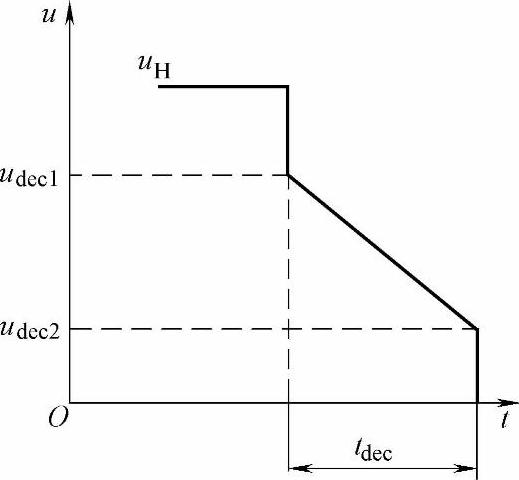
图16-37 软起动器减速斜坡
在接到停止命令后,软起动器的输出电压由额定电压下降到udec1。udec1的选择是电动机在该电压下的最大转矩TBR小于负载转矩,一般选70%~50%额定电压。当电压下降到udec2时,电磁转矩很小,对电动机的停止不起大的作用,此时可以关断晶闸管。udec2一般小于20%额定电压。减速时间tdec规定了斜坡电压从udec1下降到udec2的时间。
尽管软停止可以使泵缓慢地停止,但电动机在开始阶段下降很快,然后才缓慢下降。这与泵所要求的曲线有较大差距,会产生水锤现象。需要采用转矩控制,使电动机的停止曲线与泵要求的曲线接近。
3.直流制动停止
许多负载需要快速甚至准确停车,如一些加工机床、起重运输机械等。这就要求软起动器具有可控的制动能力,通常采用的是能耗制动方式。
异步电动机的能耗制动状态,是将运转中的电动机从三相电源断开后,迅速在其定子两相绕组内通入直流电,于是在定子内形成了一个不旋转的直流磁场,而旋转中的转子导体切割此磁场,从而在转子中产生感应电流,该电流与磁场产生的转矩正好与转子旋转方向相反,即为制动转矩。
异步电动机能耗制动机械特性如图16-38所示。它与异步电动机转子回路串电阻调速时的机械特性相似,只是将第一象限的机械特性从n0点向下平移到坐标原点,然后顺时针旋转180°。在定子直流励磁不变的情况下,改变转子回路外接电阻的大小,就改变了与最大转矩Tmax对应的转速nmax的值,例如图中曲线3对应的转子回路电阻比曲线1的转子电阻大。在转子回路电阻值不变的情况下,改变定子直流磁场电流的大小,就相应改变了最大转矩Tmax的大小。直流励磁越大,Tmax就越大,但它不改变对应的转速值nmax,它们具有相似的制动曲线。当电动机转速下降为零,制动转矩也下降为零,所以能耗制动能使电动机准确停止。
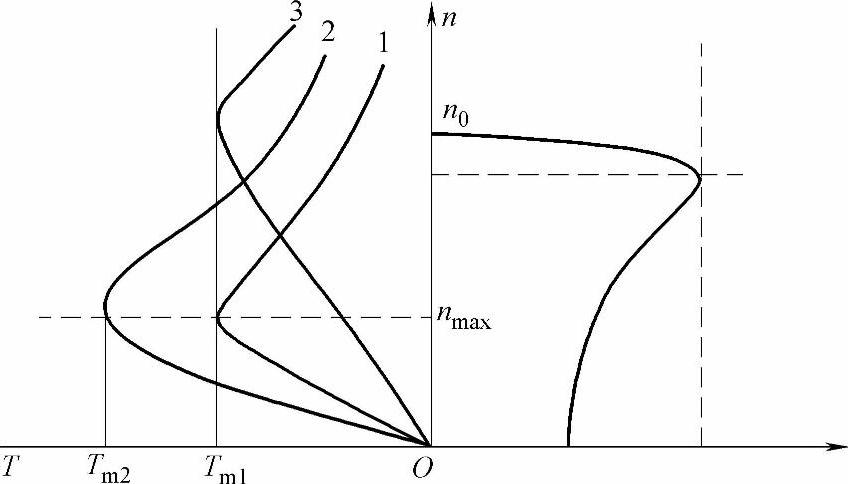
图16-38 异步电动机能耗制动机械特性
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。