



【摘要】:控制要求如图6-21所示,简易机械手由气动爪、水平移动机械手、垂直移动机械手、阀岛、水平移动限位开关、垂直限位开关、V80系列PLC、电源模块、按钮模块等组成。水平机械手处于右端极限位。2)停止状态下按下回原点按钮,机械手回原点。左移到位,垂直移动机械手下降。4)如果是自动循环运行,以上流程结束后,再自动重复步骤3开始的流程。自动运行的状态转移图1)PLC软元件分配①PLC外接元件名称、符号、作用见表6-4。
(1)控制要求
如图6-21所示,简易机械手由气动爪、水平移动机械手、垂直移动机械手、阀岛、水平移动限位开关、垂直限位开关、V80系列PLC、电源模块、按钮模块等组成。
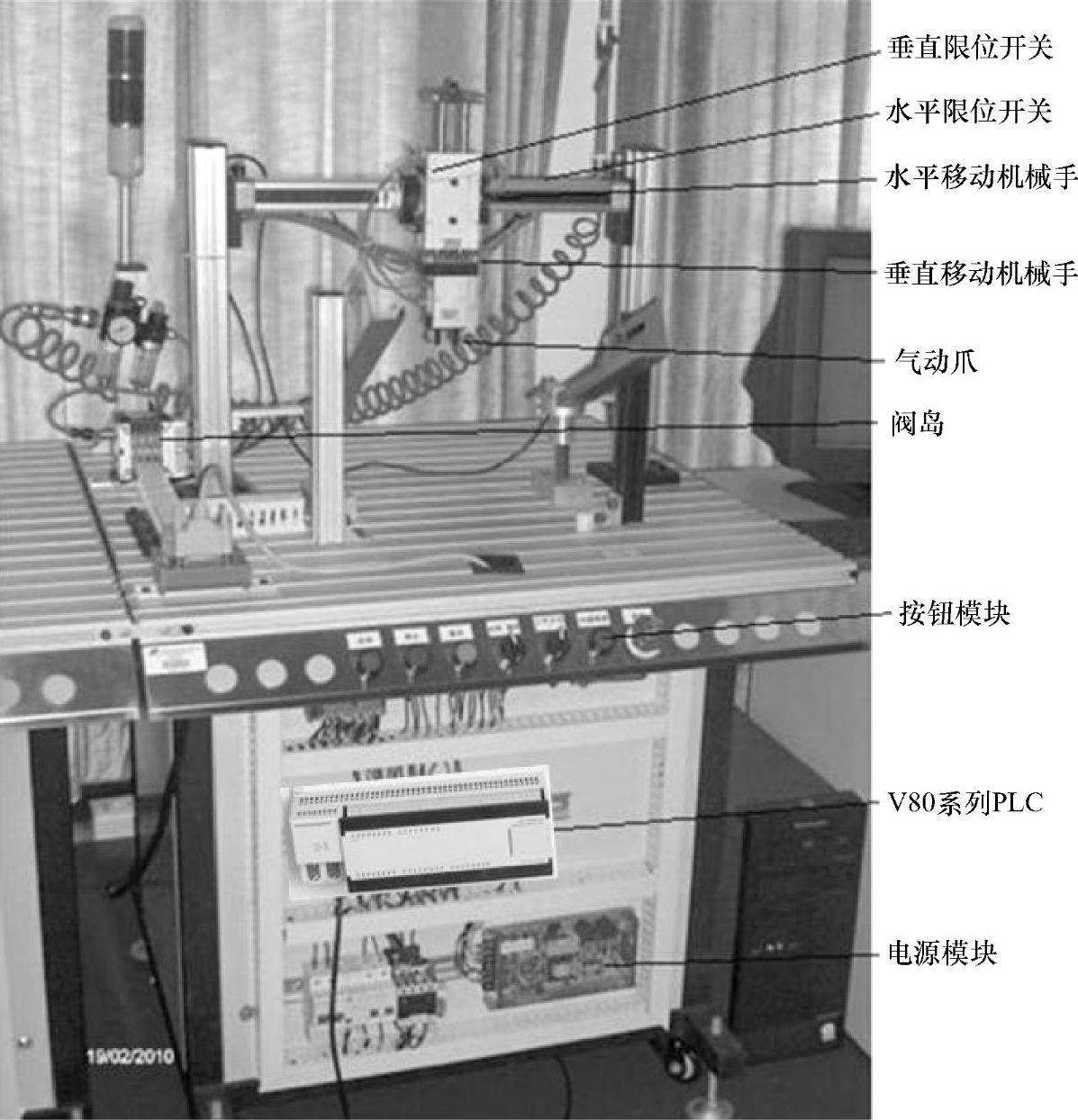
图6-21 简易机械手
机械手的原点位置:
垂直移动机械手在垂直方向处于上端极限位。
水平机械手处于右端极限位。
气动爪处于放松状态。
1)按下停止按钮,机械手停止。
2)停止状态下按下回原点按钮,机械手回原点。
3)回原点结束后按下起动按钮,垂直移动机械手下移,到位后,夹紧工件,垂直移动机械手上移。上移到位,水平移动机械手左移。左移到位,垂直移动机械手下降。下降到位,放松工件,垂直移动机械手上升。上升到位后,水平移动机械手右移,右移到位,完成一次单循环。
4)如果是自动循环运行,以上流程结束后,再自动重复步骤3开始的流程。
(2)自动运行的状态转移图
1)PLC软元件分配
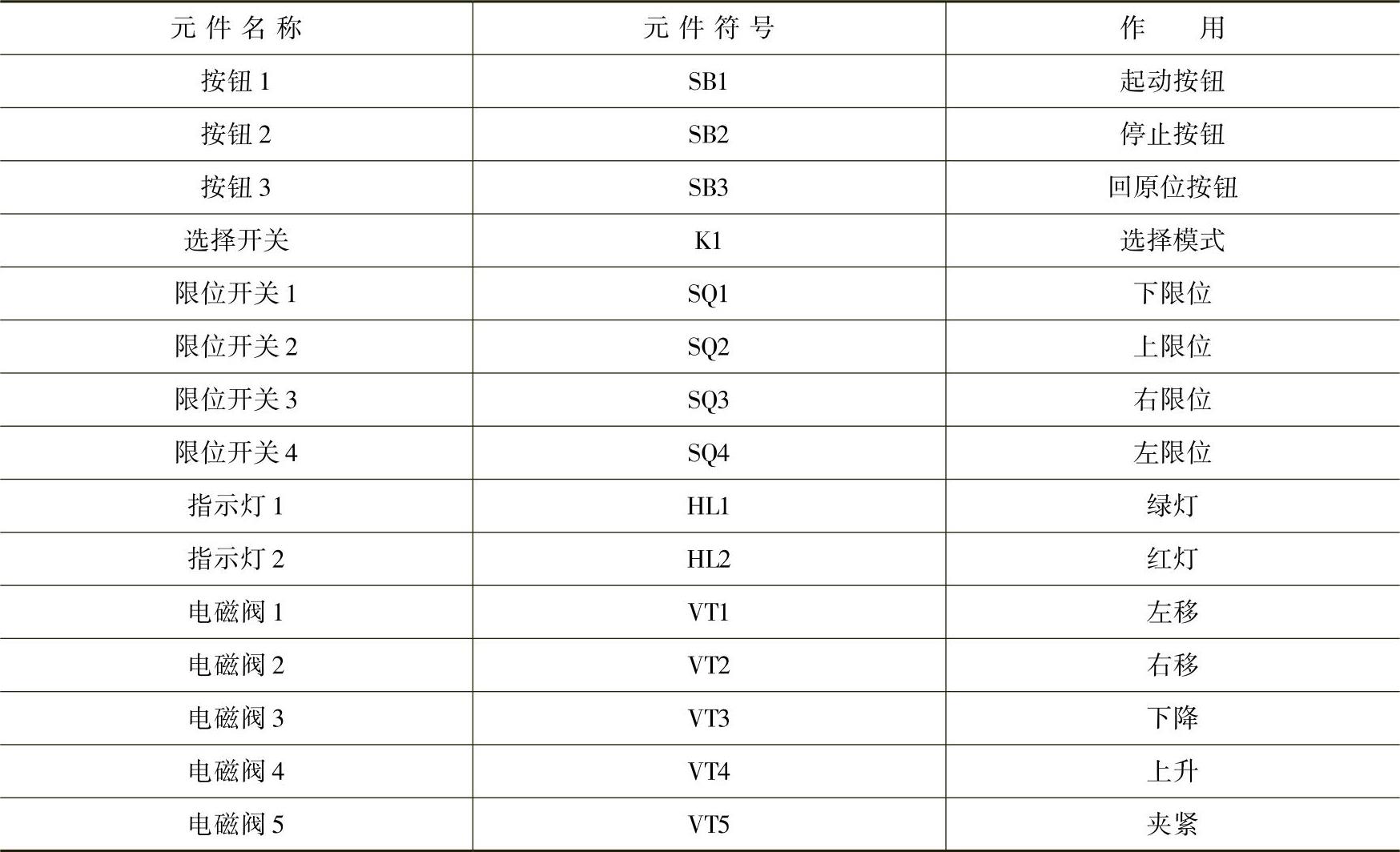
①PLC外接元件名称、符号、作用见表6-4。(https://www.xing528.com)
表6-4 元件名称、符号、作用
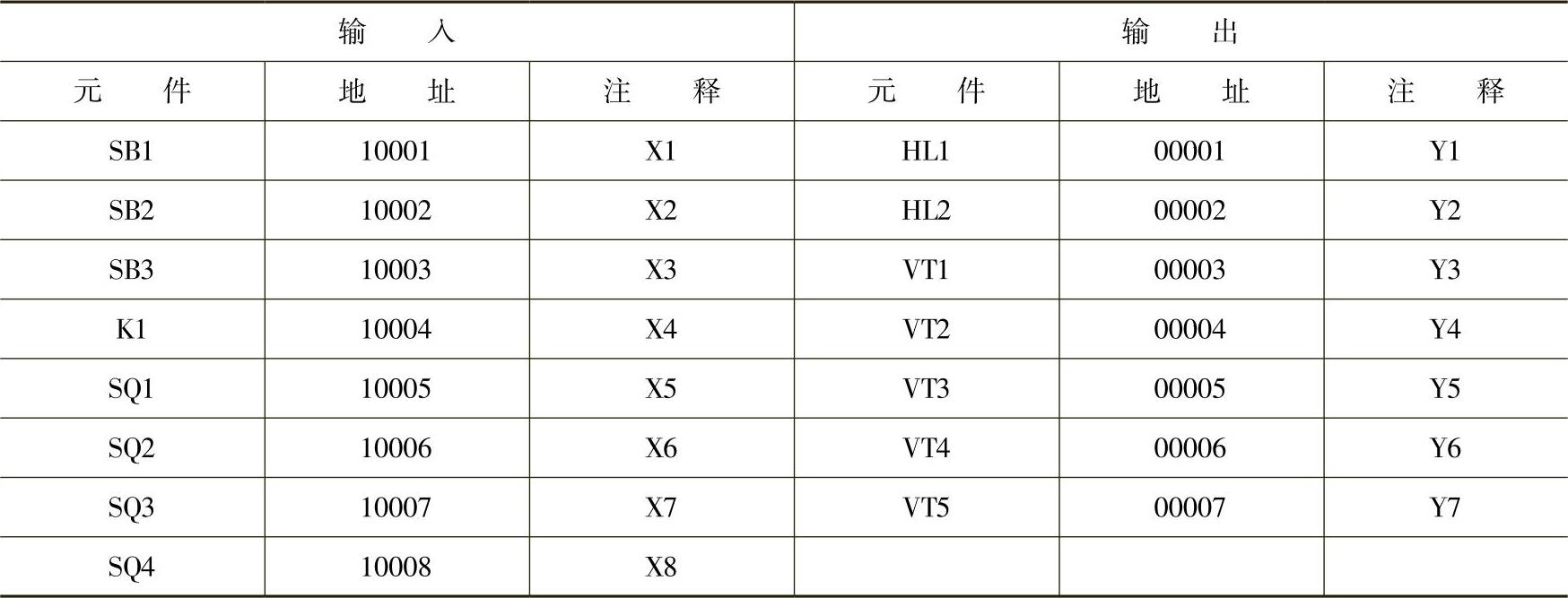
②PLC输入、输出I/O分配见表6-5。
表6-5 输入、输出I/O分配
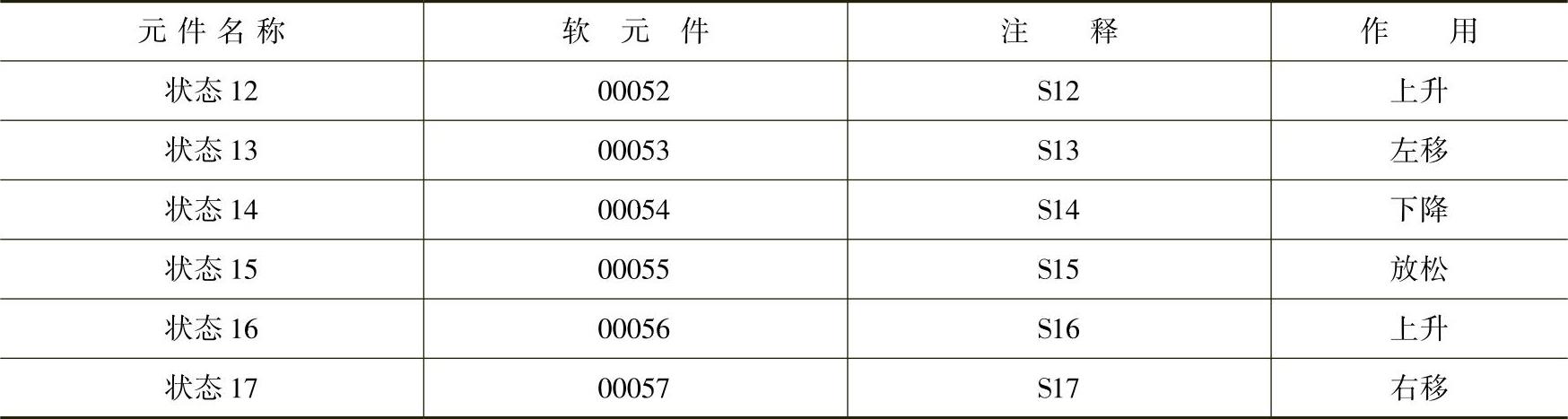
③其他软元件分配见表6-6。
表6-6 其他软元件分配

(续)
2)根据控制要求设计自动运行的状态转移图如图6-22所示。
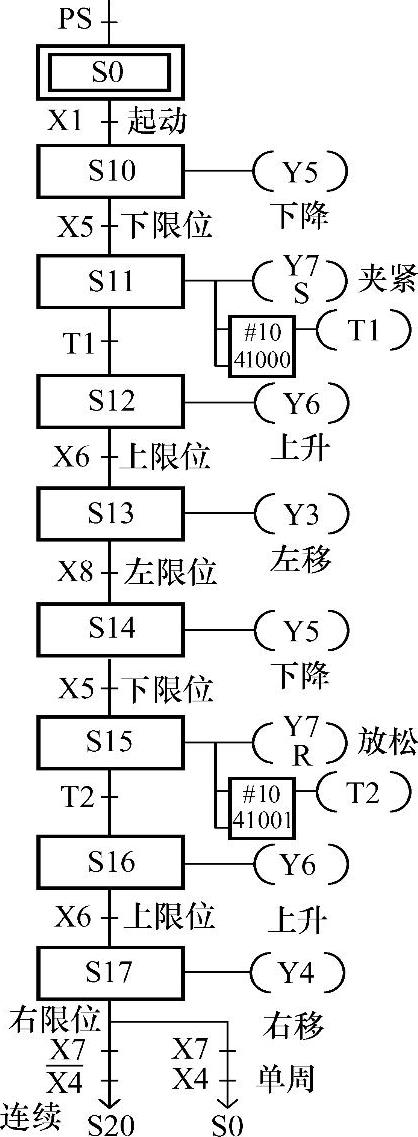
图6-22 自动运行的状态转移图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。