



永磁辅助同步磁阻电机控制环路主要包括电流环和速度环,合理设计电流环和速度环参数,可以提高电机动态性能和稳定性。因电流环和速度环的实现方式太多,本书不一一介绍,本书所讨论的电流环和速度环都是基于PI控制实现的。
1.电流环参数设计
电流环是永磁辅助同步磁阻电机系统构成的根本,其动态响应特性直接关系到矢量控制等策略的实现,直接影响整个系统的动态性能。电流环主要由电流调节器、永磁辅助同步磁阻电机、逆变器组成,其作用是使永磁辅助同步磁阻电机电枢绕组电流能实时、准确地跟踪电流指令。根据电流解耦控制的需要,电流环分为励磁电流环和转矩电流环,励磁电流环的目的是使永磁辅助同步磁阻电机在动态、静态过程中获得近似解耦,转矩电流环的目的是能够得到快速、高精度的转矩控制。虽然两个电流环是独立的,但由于转矩电流环和励磁电流环在控制方式上是相同的,故其控制参数设置一般也相同,在讨论电流环控制参数整定过程时,常以转矩电流环为研究对象。
(1)电流环控制框图。
电流环的控制对象为电流前向滤波、电流采样与滤波、PWM逆变器以及永磁辅助同步磁阻电机的电枢回路。
永磁辅助同步磁阻电机励磁电流环和转矩电流环控制框图如图5-33和图5-34所示。
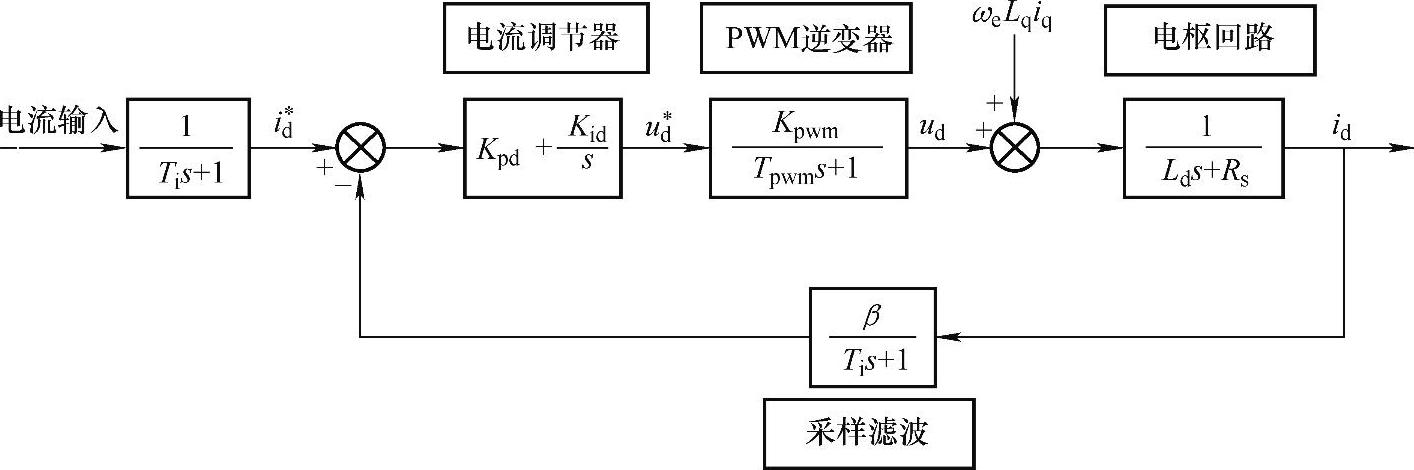
图5-33 励磁电流环控制框图
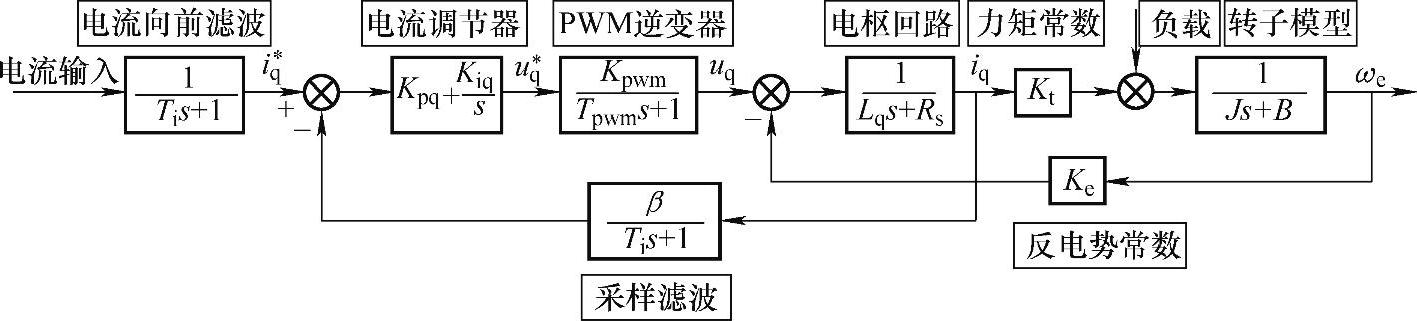
图5-34 转矩电流环控制框图
(2)电流环各部分传递函数说明。
1)PWM逆变器传递函数。
由谐波分析可知,采用SPWM调制时,逆变器输出线电压的基波分量为

逆变器输出相电压的基波分量为

式中 M——调制深度(正弦调制信号幅值与三角载波信号幅值之比)。
若给定正弦控制电压的幅值为UB,则三相脉宽调制逆变器的放大系数Kpwm为

采用SVPWM调制时,逆变器输出线电压的基波分量为

逆变器输出相电压的基波分量为

若给定正弦控制电压的幅值为UB,则三相脉宽调制逆变器的放大系数Kpwm为

故逆变器可以看成是一个纯滞后的放大环节,其放大系数为一常数。
逆变器的滞后作用可认为由开关器件关断延时、死区延时以及DSP处理延时3部分组成,其中以DSP处理延时为主。DSP处理延时主要包括电流采样延时和PWM调制波更新延时两部分。
综上所述,PWM逆变器环节的传递函数可近似为

2)电枢回路传递函数。
电枢回路方程如式(5-11)和式(5-12),可以写成

拉普拉斯变换后整理得到q轴电枢回路的传递函数为
 (https://www.xing528.com)
(https://www.xing528.com)
3)电流采样滤波传递函数。
电流采样环节可简化为比例环节,其放大系数为β。
PWM逆变器输出的电流(或电压)与来自电流检测单元的反馈信号中都含有交流高次谐波分量,易造成系统振荡,应该用低通滤波器进行滤波。电流中的谐波分量主要来源于PWM逆变器,其边带谐波主要集中在(2πfs±nω),其频率远小于fs,所以电流滤波时间常数Ti通常选择为Ti=(0.3~0.5)Ts。
综上可得电流采样滤波环节的传递函数为

(3)电流环控制框图简化。
1)小惯性环节合并。电流采样滤波、PWM逆变器控制滞后是造成电流环延迟的主要原因,这两个环节均可看成是小惯性环节,可以将其按照小惯性环节的处理方法,合并成一个小惯性环节TΣ=(Tpwm+Ti)。
2)忽略感应电动势影响。电机电枢回路可以看成一阶惯性环节,但是电机存在感应电动势,虽然它的变化没有电流的变化快,但它会影响电流环的调节。低速时,由于电动势的变化与电机转速成正比,因此相对于电流而言,在一个采样周期内,可以认为它是一个恒定扰动,其低速时的数值相对于直流电压而言较小,对于电流环的动态响应过程可以忽略不计。高速时,由电机电枢回路控制方程可以看出,由于逆变器直流电压为恒值,因此电机电动势随转速上升而增加,加在电枢绕组上的电压减小,电流变化率降低,实际电流和参考电流间将出现明显的幅值和相位的偏差,严重时(电机速度很高时),实际电流将无法跟踪参考电流的变化。
简化后的电流环开环传递函数如图5-35所示。

图5-35 电流环开环传递函数
(4)电流调节器设计。
如图5-35所示,可以得到电流环开环传递函数为

为抵消大惯性环节对系统的延迟作用,提高电流环的响应速度,取τi=Td(电气时间常数),则调节后电流环的开环传递函数为

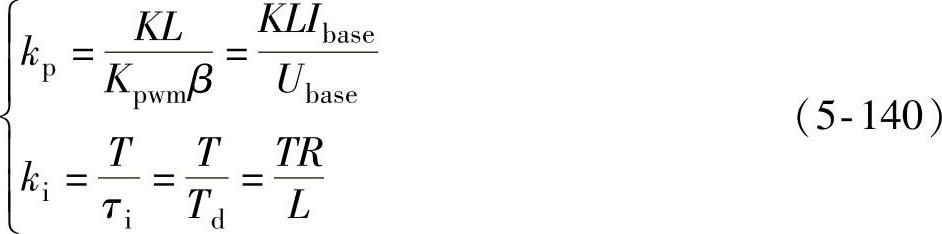
电流环开环增益K为

可以得到电流环PI调节参数如式(5-140)。
2.速度环参数设计
速度环设计直接影响电机系统的动态响应性能和电机速度输出范围。下面以id=0的控制方式来介绍速度环环路参数设计。因为电流环是内环,速度环是外环,所以电流环是速度环调节中的一个环节,电流环可以当做是惯性环节,实现降阶设计,得到

式中 Ka=KiqKpwmβ/Rs。
速度环控制框图如图5-36所示。
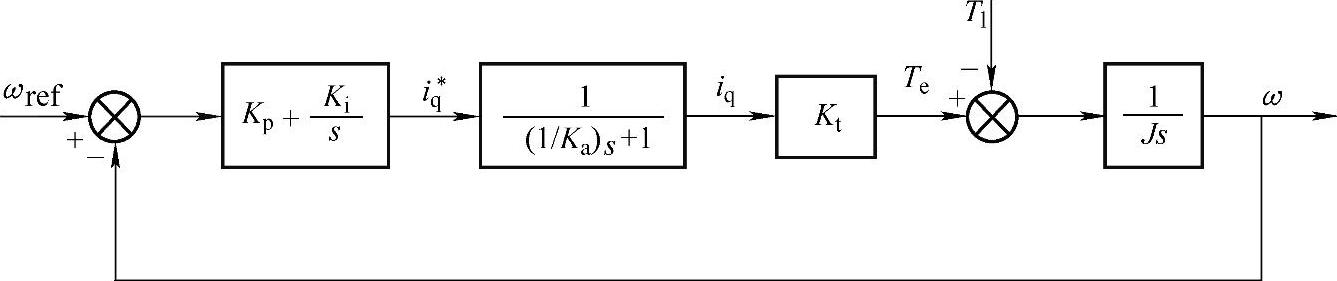
图5-36 速度环控制框图
根据图5-36所示,速度环的开环传递函数可以写成

为实现速度无静差,将速度环校正成典型的Ⅱ型系统,得到
取h=5,又由Ka≈ωc得到速度环的PI参数为

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。