



由上面建立的三相PWM整流器数学模型(参见式(5-89))可见,d轴和q轴电流之间存在交叉耦合,这会给控制系统的设计带来一定的困难。为了消除d、q轴耦合作用的影响,在控制器设计中需要采用交叉耦合前馈补偿的方法以实现解耦。
为了便于说明VOC控制策略的工作原理,现将式(5-89)的前两式整理后得
当PWM整流器稳态工作时,为了便于分析做如下定义

对式(5-91)做拉普拉斯变换后可得

由于式(5-92)为一阶惯性环节,所以可通过设计PI调节器得到。因此,对u∗d和u∗q可重新定义为
式中,KP、KI分别为电流内环的比例增益和积分增益;i∗d、i∗q分别为电流内环的给定值。(https://www.xing528.com)
将式(5-93)、式(5-91)代入式(5-90)可得

根据式(5-94)可得到三相PWM整流器的电流前馈解耦补偿环节,如图5-18所示。
通过电流前馈解耦环节使d轴和q轴电流之间解耦,消除耦合影响。由于采用了电网电压前馈补偿,电网电压的扰动也得以消除。引入前馈补偿后,d轴和q轴电流环的模型基本相同,从而进一步简化了控制系统设计。
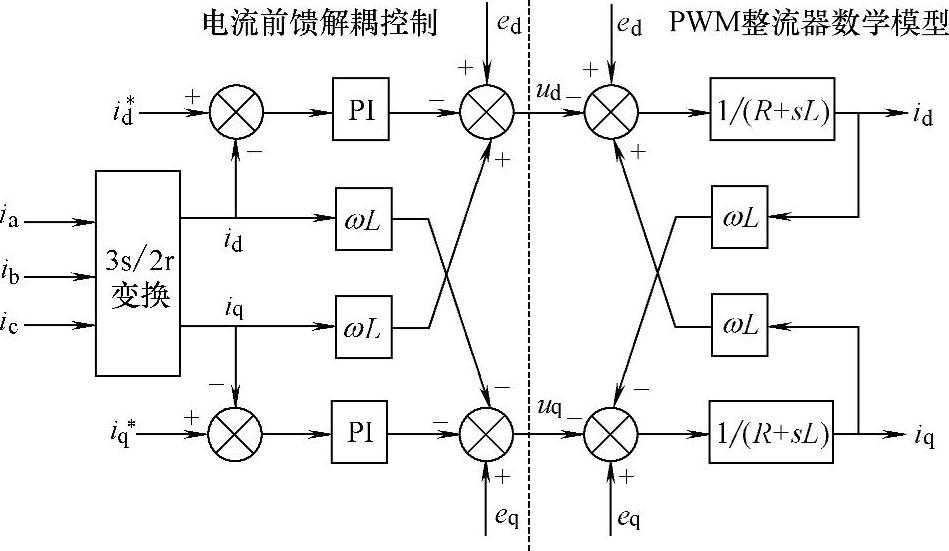
图5-18 三相PWM整流器电流前馈解耦及其数学模型图
三相PWM整流器的VOC控制框图如图5-19所示,为电压电流双闭环的控制策略。
由图5-19可见,外环是直流母线电压环,其主要作用是控制直流母线电压稳定,同时也决定了PWM整流器的功率流向,通过PI调节器对直流母线的误差进行调节,得到有功电流给定值i∗d。内环是电流环,其主要作用是实现d轴和q轴电流对给定值的无静差跟踪控制,从而实现网侧功率因数为1,通过PI调节器对d轴和q轴电流环的误差进行调节,并对电网的扰动和交叉耦合扰动进行前馈补偿。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。