



1.行程保护的方法
从安全、可靠运行的角度考虑,数控机床的进给轴行程保护原则上应具有软件限位、硬件限位、超极限急停3层保护措施。
1)软件限位。软件限位是通过CNC参数设定对进给轴行程所进行的限制和保护,它通常在轴完成回参考点操作、机床坐标系建立后才能生效。
软件限位是CNC根据进给轴的实际位置(手动)或指令位置(自动),通过软件判别坐标轴是否超程或可能出现超程的功能,当加工程序自动运行时,它可在运动指令执行前检测。软件限位一旦生效,CNC将产生软件限位报警,对应的进给轴减速停止。软件限位可禁止进给轴在指定方向的运动,但通常可通过JOG方式的反向运动退出。
软件限位的位置有时可选择多个,例如,在802S/C/D上,当软件限位选择信号V380∗1000.2/V380∗1000.3为0时,可选择CNC的第一软件限位设定参数MD36100/36110作为软件限位位置。如信号V380∗1000.2/V380∗1000.3为1,则可选择CNC的第二软件限位设定参数MD36120/36130作为软件限位位置等。
2)硬件限位。硬件限位是通过PLC信号对进给轴行程进行的限制和保护,它需要在机床上安装行程限位开关,并编制相应的PLC处理程序。
无论进给轴是否完成回参考点操作、机床坐标系是否建立,硬件限位保护功能都将始终有效,因此,它也可用于进给轴回参考点前的手动操作保护。硬件限位信号一旦为“1”,进给轴将立即减速或快速停止,CNC上显示硬件限位报警。硬件限位同样可禁止进给轴在指定方向的运动,但通常也能通过JOG方式的反向运动退出。
3)超极限急停。超极限急停是通过紧急分断驱动器对进给轴行程进行的紧急保护,它需要通过紧急分断安全电路实现。超极限急停一旦生效,无论CNC、PLC处于何种状态,电气控制系统都将直接通过安全电路(强电控制线路)紧急制动驱动电动机、并分断驱动器主电源。进给轴出现超极限急停时,原则上只能通过驱动器断开时的机械手动操作,才允许退出超极限位置。
软件限位、硬件限位、超极限急停的保护位置一般按图6.3-4所示设置。软件限位通常设定在略大于正常加工区(1~2mm)的位置上;硬件限位的位置应位于软件限位之后;超极限急停则位于硬件限位之后。超极限急停开关动作时,应保证进给轴能够通过紧急制动,在产生机械碰撞或机械部件(如滚珠丝杠)损坏前停止。
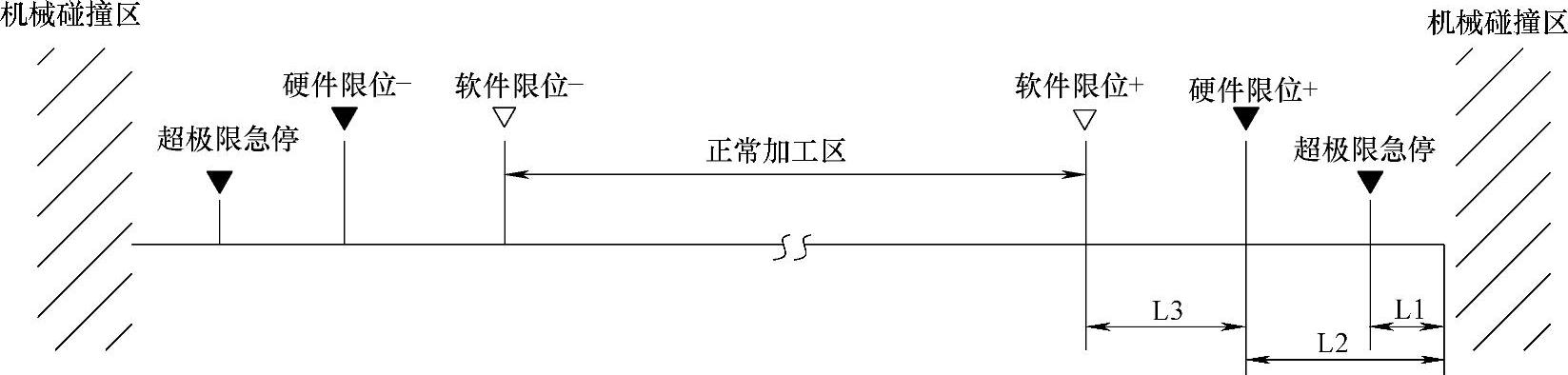
图6.3-4 行程保护的设置
2.程序设计要求(https://www.xing528.com)
3种行程保护的PLC程序设计基本要求分别如下。
1)软件限位。软件限位功能由CNC实现,因此,设计PLC程序时,只需要提供软件限位选择信号V380∗1000.2/V380∗1000.3,以选择不同的CNC软件限位参数。例如,在主轴移动式换刀的加工中心上,可将换刀时的轴运动范围作为第2软件限位区,而将正常加工时的轴运动范围作为第1软件限位区。当机床执行自动换刀指令时,通过PLC程序,使V380∗1000.2或V380∗1000.3为1,将行程保护区由第1软件限位切换至第2软件限位等。
2)硬件限位。硬件限位需要安装行程检测开关。设计PLC程序时,只需要将对应轴、对应方向上的硬件限位开关输入信号转换为进给轴的硬件限位信号V380∗1000.1/V380∗1000.0,程序示例如图6.3-5所示。
3)超极限急停。超极限急停是通过紧急分断安全电路进行的驱动器紧急分断,其控制由强电线路实现,有关内容可参见《数控机床电气设计典例》(机械工业出版社出版)一书。超极限急停时,CNC急停输入断开,故可通过第5章的急停控制PLC程序,控制CNC和驱动器急停。
3.硬件限位程序设计
硬件限位的PLC程序设计实例如图6.3-5所示。
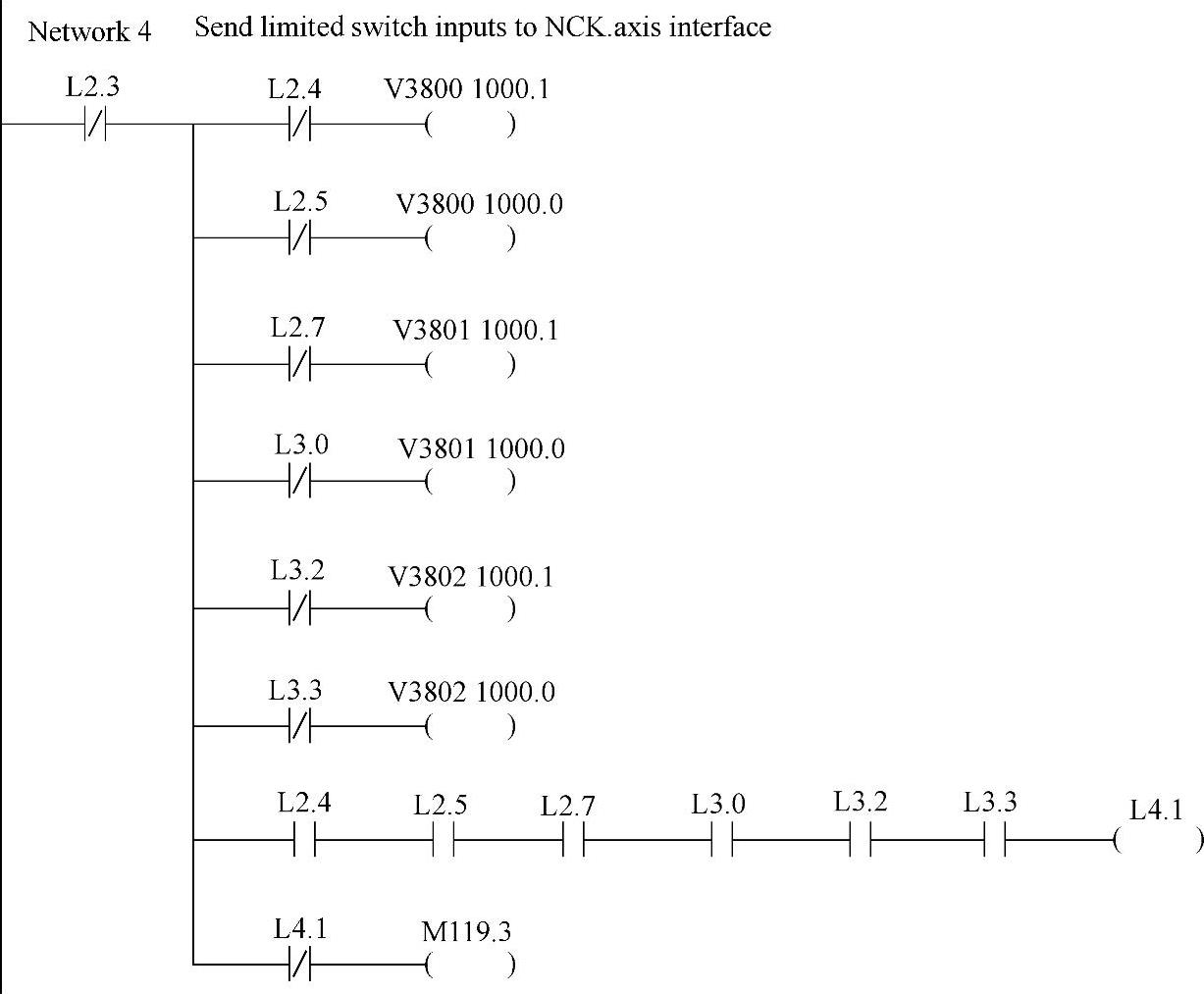
图6.3-5 硬件限位保护程序
对于802S/C/D,当机床I/O信号按模板程序要求连接时,其X、Y、Z轴的硬件限位开关+XOT/-XOT、+YOT/-YOT、+ZOT/-ZOT的输入地址分别为I0.0/I0.4、I1.2/I1.4、I0.1/I0.5,以上输入经第5章的I/O初始化子程序SBR62(FILTER)进行使能和极性变换处理后,其输入状态(常闭)缓冲寄存器分别为M100.0/M100.4、M101.2/M101.4、M100.1/M100.5。因此,当局部变量按表6.3-1赋值时,只需要将局部变量依次转换为进给轴的硬件限位信号V380∗1000.1/V380∗1000.0。
Network4中,进给轴的正/负硬件超程信号可在对应的硬件限位开关动作(常闭触点断开)时输出1;在超程退出或输入超程解除信号(L2.3=1)时恢复为0。程序中的M119.3是用于前述进给停止控制程序的硬件限位动作信号,在任一硬件限位开关动作时,其状态将成为1。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。