



位左/右移指令是使指定长度的位软元件每次左/右移指定长度。
1.指令表现形式
位左移指令(SFTL)和位右移指令分别如图8-148、图8-149所示。指令使用说明如下:

图8-148 位左移指令表现形式

图8-149 位右移指令表现形式
1)指令只能执行16位操作数;
2)指令可以采用连续执行方式,也可以采用脉冲执行方式。建议采用脉冲执行方式。
3)指令中操作数说明:
①[S.]:右移后在移位数据中保存的起始位软元件编号。操作数种类:X、Y、M、S。
②[D.]:右移的起始位软元件编号。操作数种类:Y、M、S。
③n1:移位数据的位数据长度(或者说目标D的数据位数)。n2≤n1≤1024
④n2:右移的位点数(或者说为源数据的位数)。n2≤n1≤1024
2.功能动作
图8-148所示位左移指令动作如图8-150所示,当X0为ON时,对于Y10开始的9位数据(n1=K9),左移3位(n2=K3),移位后,将X10开始的3位(n2=K3)数据传送到Y10开始的3位中。
指令在执行过程中,源的内容不会发生改变。(https://www.xing528.com)
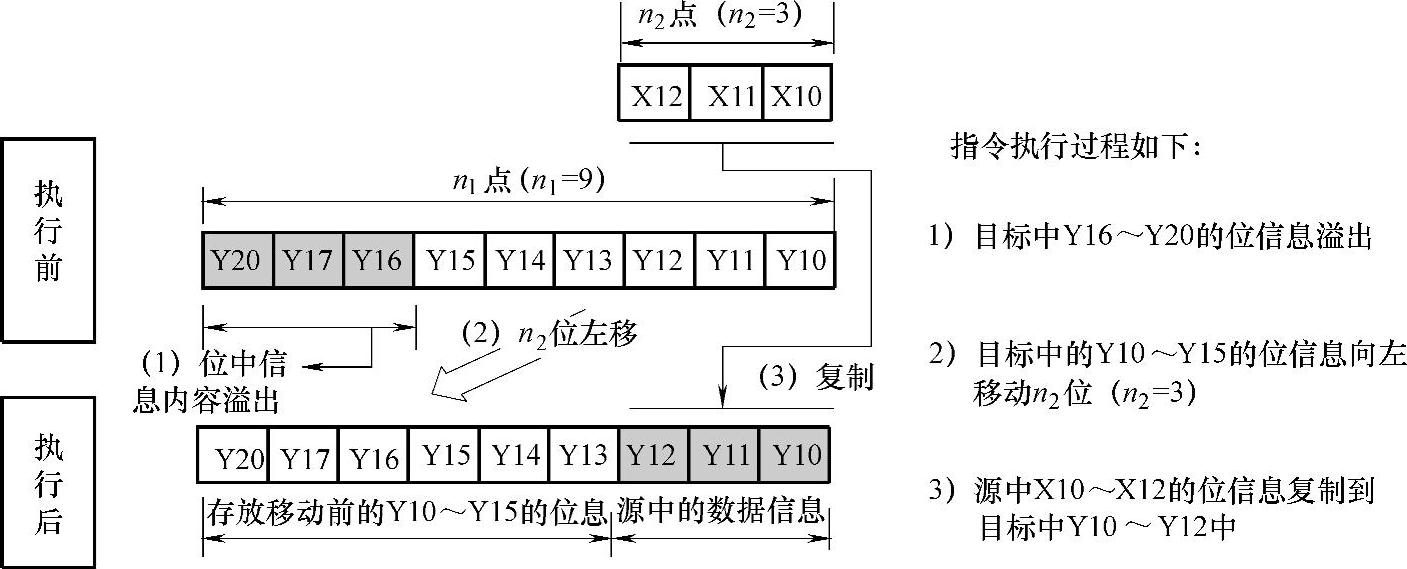
图8-150 位左移指令动作执行过程
位右移指令动作过程参考位左移指令,此处省略。
【例8-30】多台电动机控制
有5台三相异步电动机M1~M5控制。起动时,按下起动按钮,起动信号灯亮5s后,电动机按从M1到M5每隔5s起动一台,电动机全部起动后,起动信号灯灭。停止时,再按下停止按钮,停止信号灯亮,同时电动机按从M5到M1每隔3s停止一台,电动机全部停止后,停止信号灯灭。
参考程序如图8-151所示,图中I/O口如下:X0起动信号,X1停止,X2急停,Y0起动指示,Y1~Y5为电动机1~电动机5,Y6停止运行指示。
【例8-31】步进电动机控制
以位移指令实现步进电动机正反转和调速控制。有一三相三拍步进电动机,脉冲列由Y010~Y012(晶体管输出)送出,作为步进电动机驱动电源功放电路的输入。
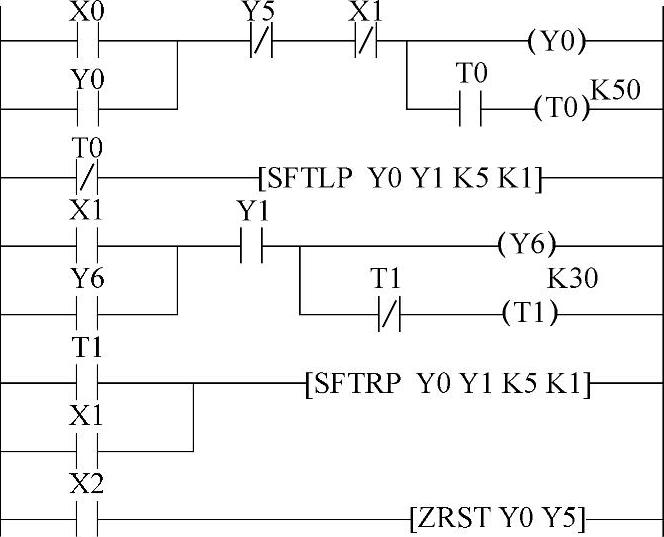
图8-151 参考程序
程序中采用积算型定时器T246为脉冲发生器,设定值为K2~K500,定时为2~500ms,则步进电动机可获得500步/s~2步/s的变速范围。X000为正反转切换开关(X000为OFF时,正转;X000为ON时,反转),X002~X004分别为起动、减速、增速按钮。
本例分析:以正转为例,程序开始运行前,设M0=0。M0提供移入Y010~Y012的“1”或“0”,在T246的作用下最终形成011、110、101的三拍循环。T246为移位脉冲产生环节,INC指令及DEC指令用于调整T246产生的脉冲频率。T0为频率调整时间限制。
调速时,按住X003(减速)或X004(增速)按钮,观察D0的变化,当变化值为所需速度值时,释放。梯形图如图8-152所示。
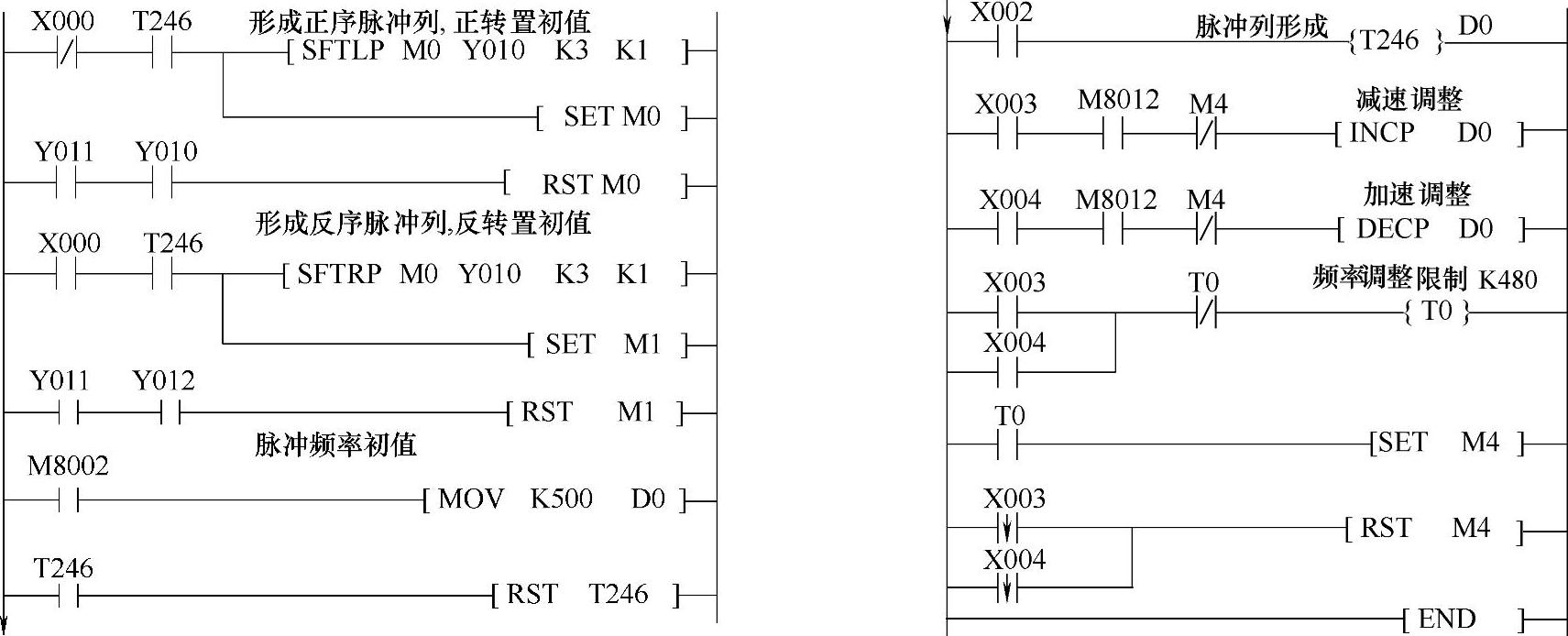
图8-152 步进电动机控制参考程序
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。