



液力透平轴功率的测量方法有天平式测功机和转矩式测功机。
1.天平式测功机
用天平式测功机测量转矩是传统测量方法之一,可用普通交流电动机改装,如图2⁃21所示。
把电动机的定子用轴承支起来,电动机定子通电后,由于电磁转换关系,给转子以旋转力矩,使转子旋转,而转子给定子以大小相等、方向相反的反作用力矩。此力矩使定子以轴承为支点摆动,其大小可以用砝码质量来平衡。
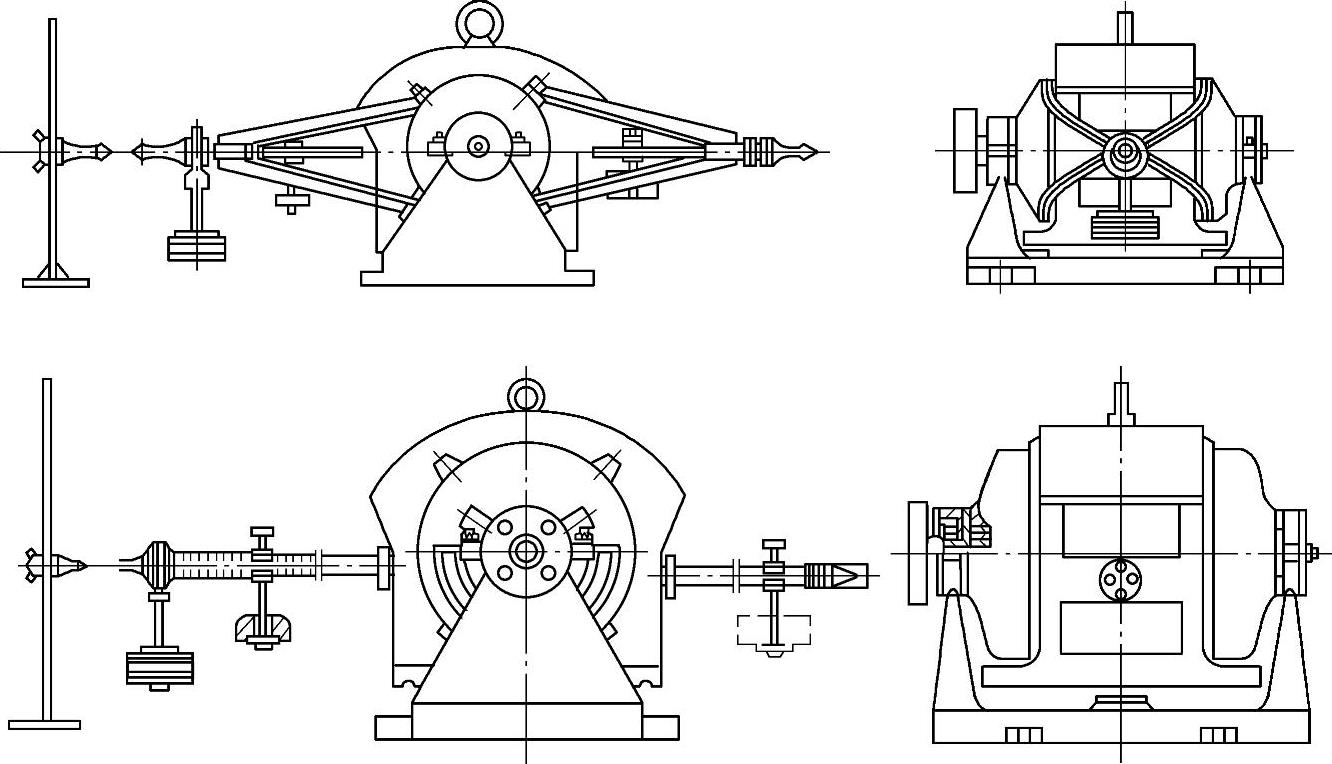
图2⁃21 测功电动机
天平测功机的不灵敏度Δ即引起天平离开平衡位置的最小负荷,当力臂长度等于0.974m时,其不灵敏度不得超过表2⁃6规定。当力臂长度大于或小于0.974m时,负荷Δ数值可以成比例地减小或增加。
表2⁃6 不同转速下天平测功计允许不灵敏度极限值 (单位:N·m)
测量时,先将天平测功机的联轴器与透平脱开空转,调整砝码,使两力臂平衡,当天平测功机与透平连接后测得的力矩,即是透平轴上的转矩M,此时轴功率即为

式中 ω——角速度(rad/s);
n——转速(r/min);
M——透平轴上的转矩(N·m),M=mgL;
m——砝码质量(kg);
L——力臂长度(m)。
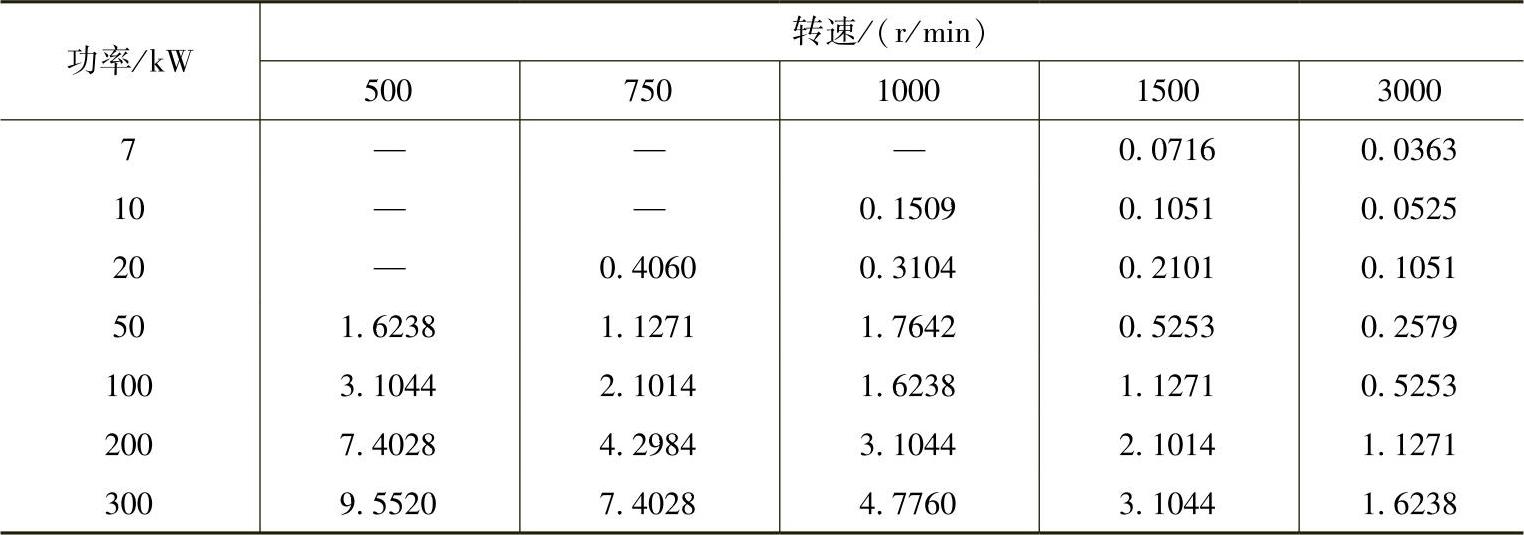
一种自动电动机⁃天平测功机如图2⁃22所示,其构成也是按天平原理设计的。将步进电动机6悬挂在支架上,形成一个摆动系统,由一个力矩传感器、一个平衡传感器和一个测速传感器组成,与数字式转矩⁃转速测量仪配套构成转矩、转速测量系统。力矩传感器固定在摆动体上,它由步进电动机6、丝杆2和游码5组成,步进电动机6与丝杆2直接连接,能正反旋转,使游码5做左右移动。平衡传感器装在固定的龙门架上,摆杆左右触及时发出信号。转速传感器用齿盘装在电动机轴端,采用前面介绍的磁电式测速法。
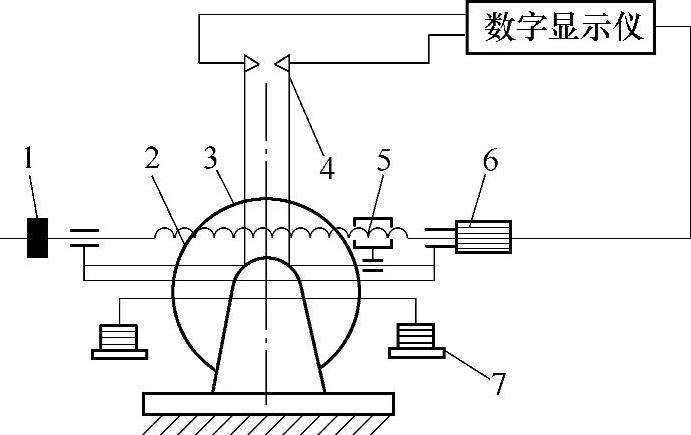
图2⁃22 自动电动机⁃天平测功机
1—平衡配重 2—丝杆 3—电动机定子 4—电触点 5—游码 6—步进电动机 7—固定砝码
当透平转矩发生ΔM1变化时,自动测功机的平衡传感器发生偏摆,产生了不平衡信号,通过数字式转矩⁃转速仪的控制,使力矩传感器的步进电动机转动,从而带动丝杆,使丝杆上的游码移动了L距离后,摆动系统达到新的平衡。
游码移动后所产生的力矩为
ΔM2=mgL=mgKN(2⁃23)
式中 K——一个工作脉冲,是步进电动机带动游码所移动的步距量,是测功机丝杆确定的常数,K=0.05mm;
m——游码质量(kg);
N——转矩⁃转速仪传送给步进电动机的工作脉冲。
按力的反作用原理,ΔM2=-ΔM1。使用时,先在测功机的摆动系统的固定臂杆上放置一定数量的砝码(按测量范围定),配重砝码对摆动系统产生一个力矩M1,在转矩⁃转速仪上预置M1的数。当测功机转动,输出轴功率时,测功机摆动系统除了平衡M1的力矩外,再驱动步进电动机,使游码移动,产生ΔM的力矩,此时力矩M=M1+ΔM,使测功机的平衡系统达到平衡,则在仪器上的数码显示M=M1+M2,直接反映了测功机的转矩量[27]。
天平式测功机的使用范围存在一定限制,不同转速、不同输出功率的试验透平就需要配不同的天平测功机。
2.转矩传感器
(1)磁电式转矩传感器这是利用转轴受扭后产生的弹性变形来测量转矩大小的转矩传感器,其结构如图2⁃23所示。(https://www.xing528.com)
传感器中间为一根标准的弹性轴1、两端安装有两个相同的齿轮3,在两个齿轮的外侧各安装一块绕有线圈的磁钢4。当弹性轴1转动时,由于磁钢4与齿轮3间隙磁导的变化,在信号线圈2中分别感应出两个电动势u1和u2。当外加转矩为零时,这两个电动势有一个恒定的初始相位差θ0。θ0只与两只齿轮在轴上安装的相对位置和两个磁钢的相对位置有关。当外加转矩时,弹性轴产生扭转变形,轴的一端相对另一端产生一个偏转角Δθ,当轴在弹性限度内,其扭转角Δθ与外加转矩M成正比,即Δθ=KM,此时,在两个信号线圈中的感应电动势u1和u2的相位差也随之发生变化,这一相位差变化的绝对值与外加转矩M成正比。
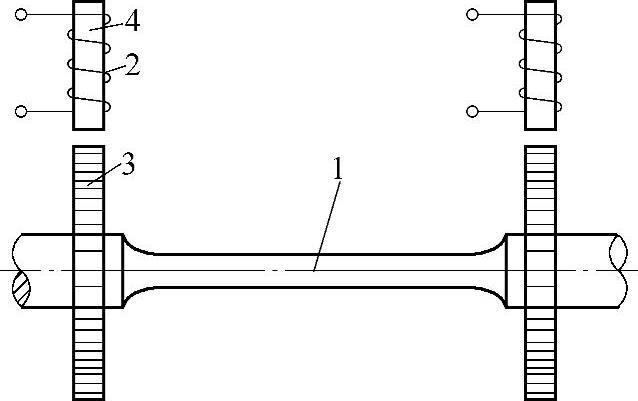
图2⁃23 磁电式转矩传感器结构
1—弹性轴 2—信号线圈 3—齿轮 4—磁钢
两个感应电动势分别为
u1=UmsinZωt(2⁃24)
u2=Umsin(Zωt+2θ)(2⁃25)
式中 Z——齿轮的齿数;
ω——轴的角速度(rad/s);
θ——两个齿轮间的空间偏转角(rad)。
θ角由两部分组成:一部分是齿轮安装时的初始角θ0;另一部分是由于受转矩M后,弹性轴变形而产生的偏转角Δθ=KM。因此
u1=UmsinZωt
u2=Umsin[Zωt+Z(θ0+Δθ)] (2⁃26)=Umsin(Zωt+Zθ0+ZKM)
相位差式传感器的两路电动势u1和u2,分别经过放大整形后送入检相器。检相器输出为矩形波,其宽度t1正比于u1和u2的相位差Zθ,即

其波形如图2⁃24所示。
因此,转矩的测量就是两个电动势的相位差的测量。数字转矩显示仪就是用适当的电路将标准时间脉冲填入相位差信号,从而达到转矩测量的数字显示。
另外,两个感应电动势u1和u2的频率f与转速及齿轮数的乘积成正比,即
f=Zn (2⁃28)
这种测量方法对转矩传感器的安装有下述要求:
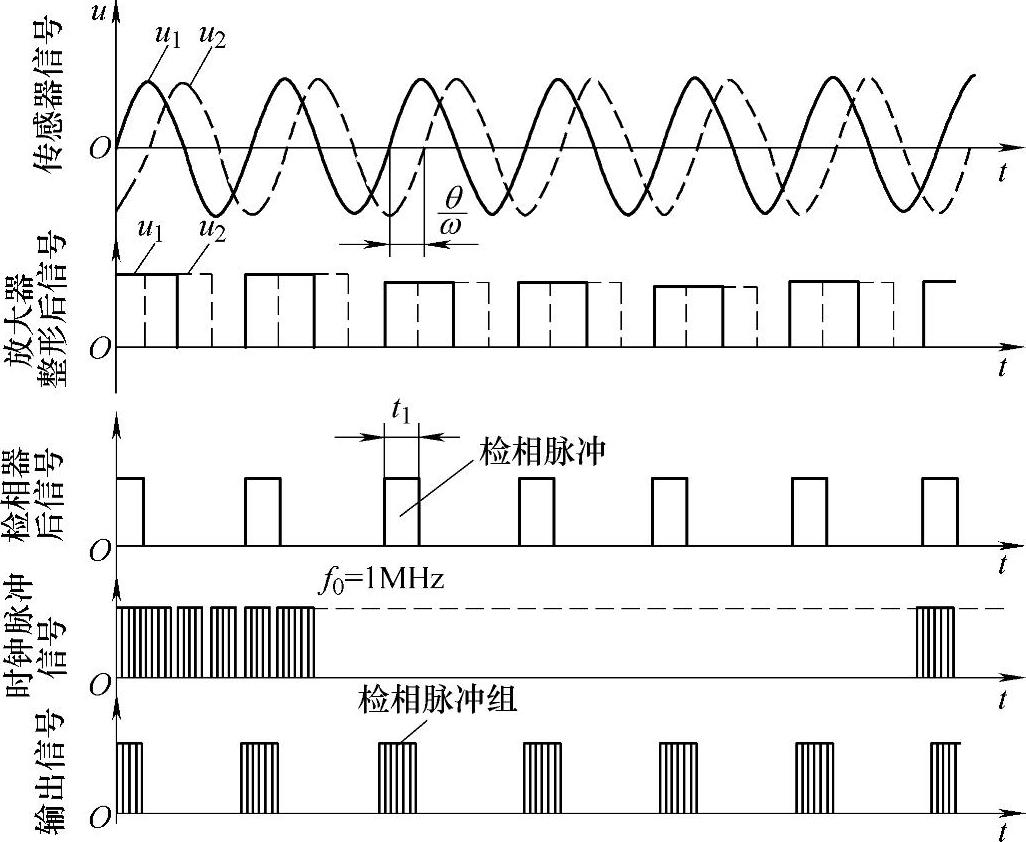
图2⁃24 检相器输出波形图
1)试验透平、传感器、负载三者应安装在同一稳固的基础上,必须避免各部件发生振动。
2)为了避免在传感器弹性轴上产生弯矩,安装时必须使试验透平、传感器和负载三者具有较好的同心度。当存在弯矩时,不但降低测量精度,而且在某种情况下甚至会使弹性轴损坏。
3)在可能的条件下,应尽量减小联轴器的质量。
(2)应变式转矩传感器应变式转矩传感器的检测敏感元件是电阻应变桥。将专用的测扭应变片用应变胶粘贴在被测弹性轴上以组成应变电桥,只要向应变电桥提供电源,即可测得该弹性轴受扭的电信号;然后将该应变信号放大,再经过压/频转换变成与扭应变成正比的频率信号。传感器的能源输入及信号输出是由两组带间隙的特殊环形旋转变压器承担的,因此可实现能源及信号的无接触传递,如图2⁃25所示。
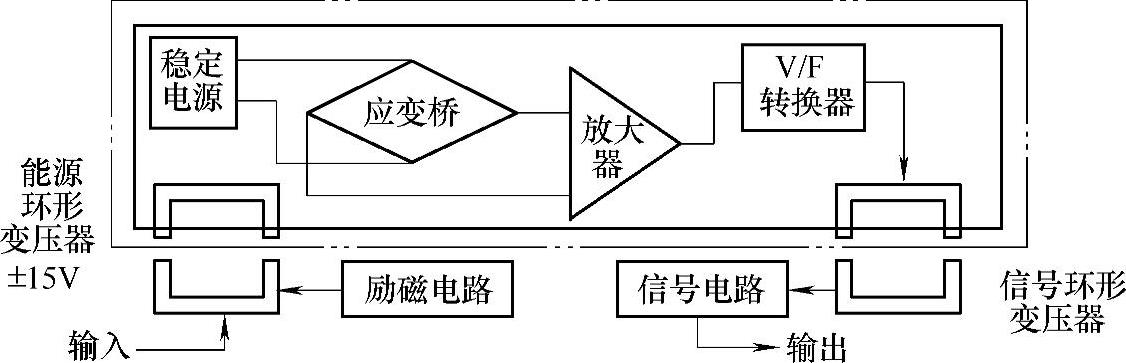
图2⁃25 应变式转矩传感器测量原理
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。