



视频测速通过对摄像机拍录的视频序列进行分析以实现车辆的定位和测速。当前常用的方法主要有虚拟线圈法和目标跟踪法。目标跟踪法效果更为理想,但实现起来较为困难;虚拟线圈法易于实现,精度不高。
(一)视频测速的方法
1.虚拟线圈视频测速系统
最早出现的视频原理测速监测系统是虚拟线圈视频测速系统,它是在视频图像中的车道上,相距30~50m处设两个虚拟线圈,利用车辆通过两个虚拟线圈的时间差得出其车辆运行速度。
在虚拟线圈技术中,主要有两种方法:一种是将检测区域分成许多个虚拟线圈,结合基于方向的运动矢量检测对区域中的物体进行检测。另一种较为常用的是把图像按照车道分为不同的检测区域,在检测区域中设置检测线,每次只扫描检测线,对区域中的若干检测线进行分析。
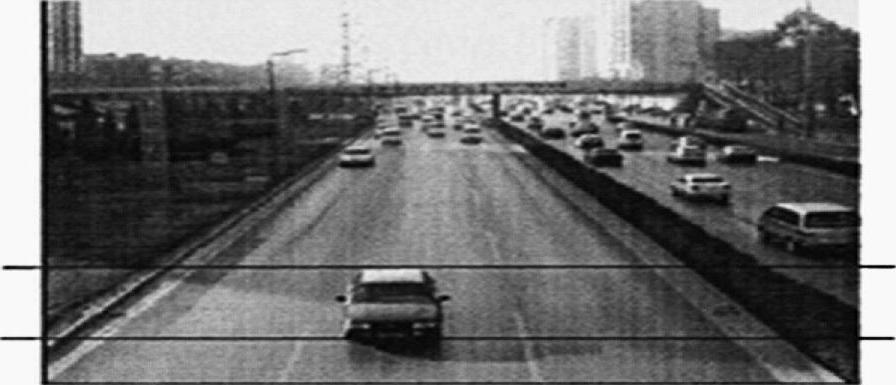
图8-17 虚拟线圈设置示意图
常用的第二种虚拟线圈检测方法的基本原理:在待测车道上垂直于车辆运动方向上画两条直线作为虚拟线圈。其示意图如图8-17所示。在两条检测线上检测车辆是否压线,得到同一辆车经过两个线圈的时间间隔Δt,两条检测线的距离通过摄像机标定可以得知,经过计算得出车辆的车速V=ΔS/Δt。
优点:方便,简单,不破坏路面,不更换线圈。
缺点:测速误差太大;凡经过虚拟线圈的物体均被记录下来,无效数据多,误判车辆多;一次只能对一个车道一辆车进行测速。两辆车或数辆车过近时无法测速、无法判别。因此误判车辆较多以及测速误差太大。
虚拟线圈视频测速系统在视频图像中的车道上现在已经用得非常多了,只不过误差比较大有时候需要人工计算筛选。
2.目标识别与跟踪视频测速系统
目标识别与跟踪视频测速系统是对多条车道的所有车辆进行目标识别与跟踪,并描述其运动轨迹。通过轨迹得到其精确车速。
目标识别技术为图像的特征模式识别,其基本原理是对所要识别的目标特征进行详细的描述和建模。正确建模是该技术的关键。目标跟踪技术也可称为目标锁定跟踪技术,就是在一定的区域范围内不丢失目标。该系统应用在机动车测速方面,应保证在几十米距离内不丢失机动车目标。
(1)基本原理
通过多路采集卡将测速及车牌摄像机的图像信号实时传送到计算机中,由计算机进行实时分析计算。对图像进行目标识别,在判别出真正的目标后进行目标锁定并对锁定的目标进行实时跟踪,同时计算出车辆的精确位置并得出目标运动的矢量轨迹曲线图。图像中车辆的位置都是可以准确确定的,而每幅图像的采集时间固定不变,所以,可得出非常精确的位移差ΔS和时间差Δt。从矢量曲线图中取A、B两点,即可得出其位移差ΔS和时间差Δt:
V=ΔS/Δt式中V——汽车运动速度;
ΔS——A、B两点之间的精确距离;
Δt——汽车由A点到达B点所需的准确时间。
摄像机由上向下,俯视看路面,路面上任何车辆的一举一动都会在系统的监视之下。可以最大限度地获取路面上的车辆信息,所以得到的速度非常精确。
(2)特点
多目标识别与跟踪技术不受拍摄角度的限制;可同时监测三条车道,跟踪16个机动车目标,在60m内锁定不丢失,精确计算每辆车车速;测速精度高,无误判;适合于固定点测速,不易移动测速。
(二)视频测速的实现
视频测速的实现是通过使用软件算法对视频信号进行分析和运算完成的。
1.视频测速流程
第一步:从视频信号中获取目标物体在一定时间内运动的像素距离;(https://www.xing528.com)
第二步:将该像素距离与实际距离相对应,以获得在一定时间内目标车辆所运动的实际距离;
第三步:根据速度公式求取目标实际运动速度。
第一步牵涉到在视频信号中对于物体的定位,这种定位是通过软件算法来实现的。第二步涉及了镜头坐标至世界坐标之间的转换,属于计算机视觉领域的范畴,通常需要首先对摄像头进行参数标定,而且这种标定要求摄像头是固定安装且不动的。
其流程如图8-18所示。
2.摄像机的标定
摄像机的成像过程可以通过一个数学模型来大致的模拟,通过它可以获得被测物体与图像之间的几何关系。其标定方法如图8-19所示。
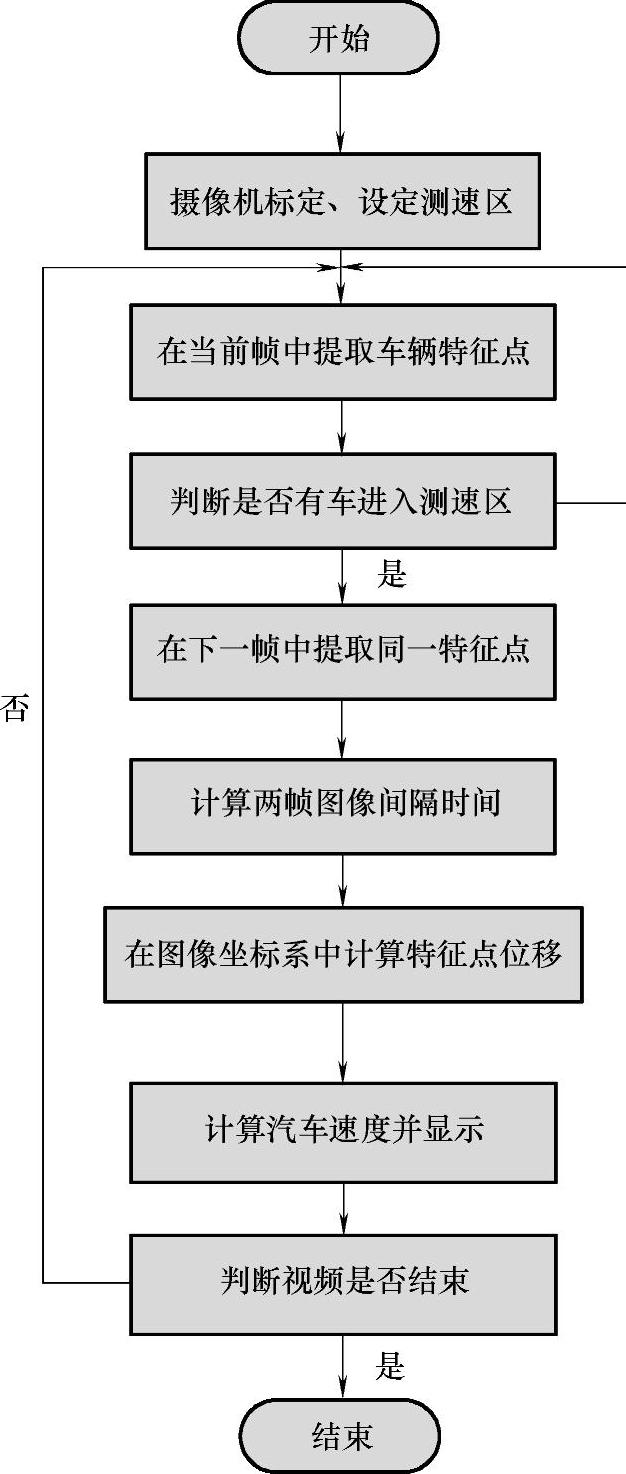
图8-18 视频测速流程图
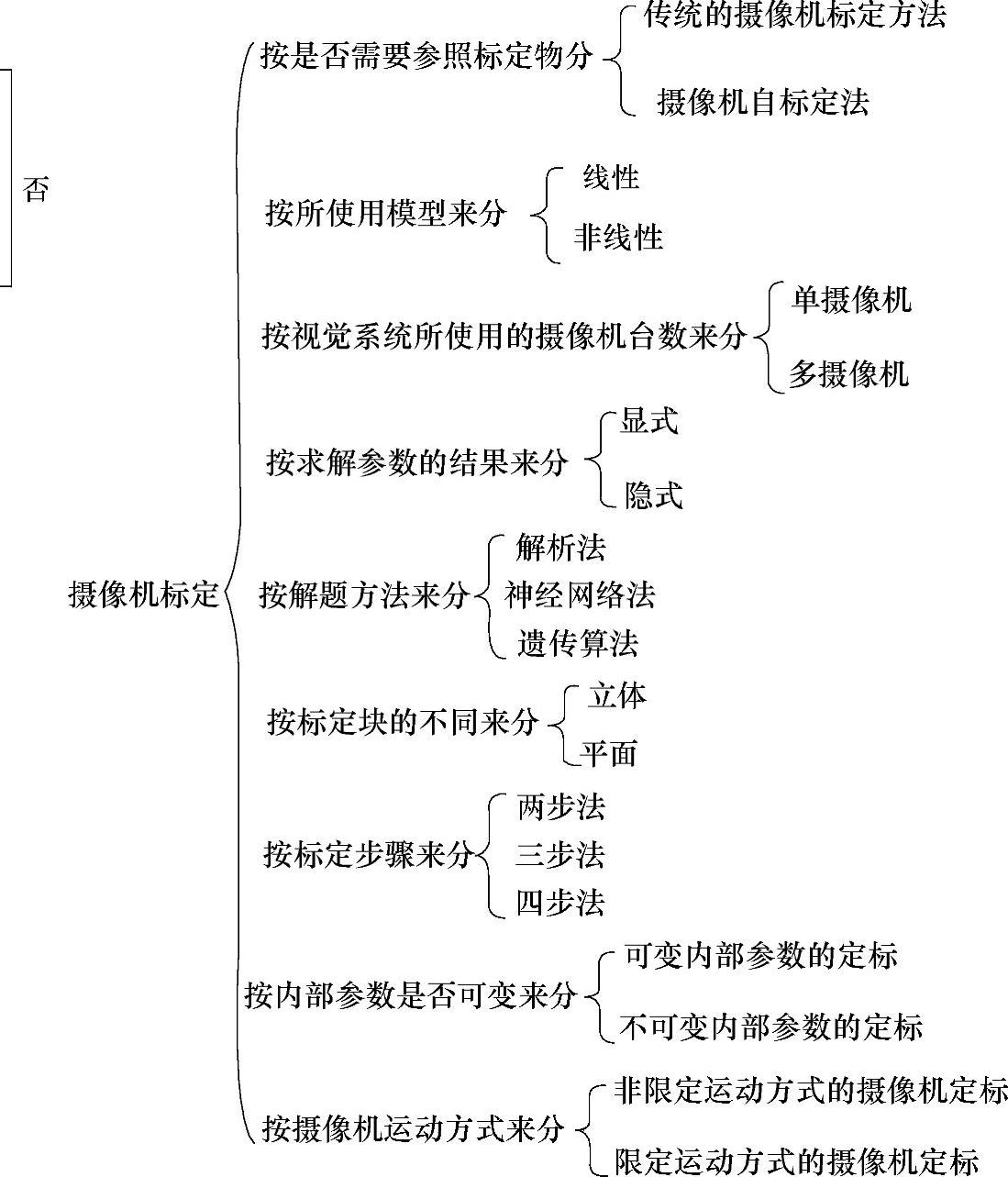
图8-19 摄像机的标定方法
3.常用坐标系及其关系
计算机视觉常用坐标系采用右手准则来定义,图8-20表示了三个不同层次的坐标系统:世界坐标系、摄像机坐标系和图像坐标系(图像像素坐标系和图像物理坐标系)。
(1)世界坐标系(Xw,Yw,Zw)
也称真实或现实世界坐标系,或全局坐标系。它是客观世界的绝对坐标,由用户任意定义的三维空间坐标系。一般的3D场景都用这个坐标系来表示。
(2)摄像机坐标系(xoy)
以小孔摄像机模型的聚焦中心为原点,以摄像机光轴为ozc轴建立的三维直角坐标系。x、y一般与图像物理坐标系的X,Y平行,且采取前投影模型。
(3)图像坐标系
图像坐标系又分为图像像素坐标系和图像物理坐标系两种:
图像物理坐标系:其原点为透镜光轴与成像平面的交点,X与Y轴分别平行于摄像机坐标系的x与y轴,是平面直角坐标系,单位为毫米。
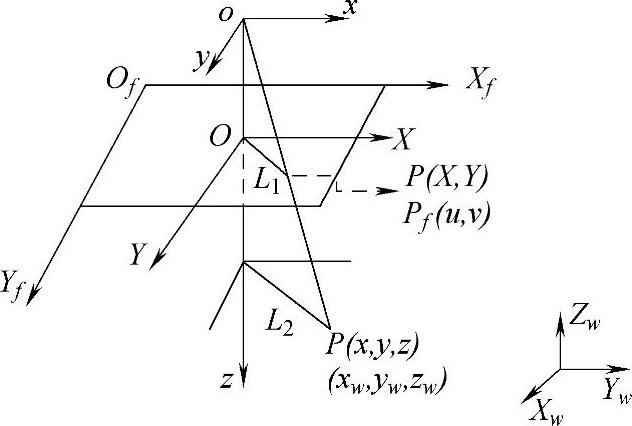
图8-20 摄像机标定系统的常用坐标系
图像像素坐标系:固定在图像上的以像素为单位的平面直角坐标系,其原点位于图像左上角,Xf、Yf平行于图像物理坐标系的X和Y轴。对于数字图像,分别为行列方向。
根据三个坐标系的设定和针孔摄像机成像原理可建立世界坐标系与图像坐标系变换关系为
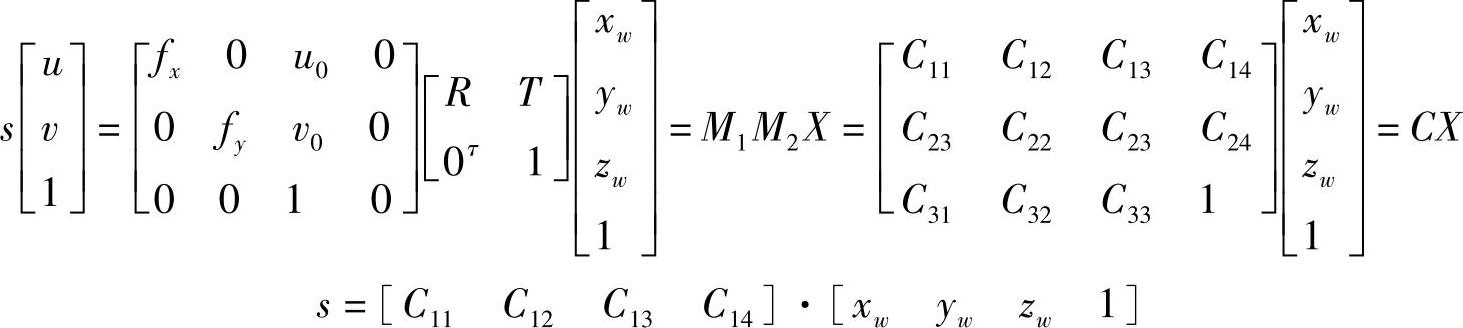
式中,u0,v0是图像中心(光轴与图像平面的交点)坐标,fx和fy分别是X和Y方向的等效焦距。fx、fy、u0和v04个参数只与摄像机内部结构有关,因此称为摄像机内部参数。上式中的11个参数摄像机矩阵C可以用最小二乘拟合的方法求出,该方法需要至少6组数据,每组设局包括图像点和对应被观测的3D点。摄像机的标定的目的就是为了得到这个11个参数矩阵,来建立像素点在给定的摄像机的图像阵列中的位置与3D场景中要成像的实值点的关系。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。