



在自动换刀数控机床中,机械手的形式也是多种多样的,常见的有图3-43中的几种形式。
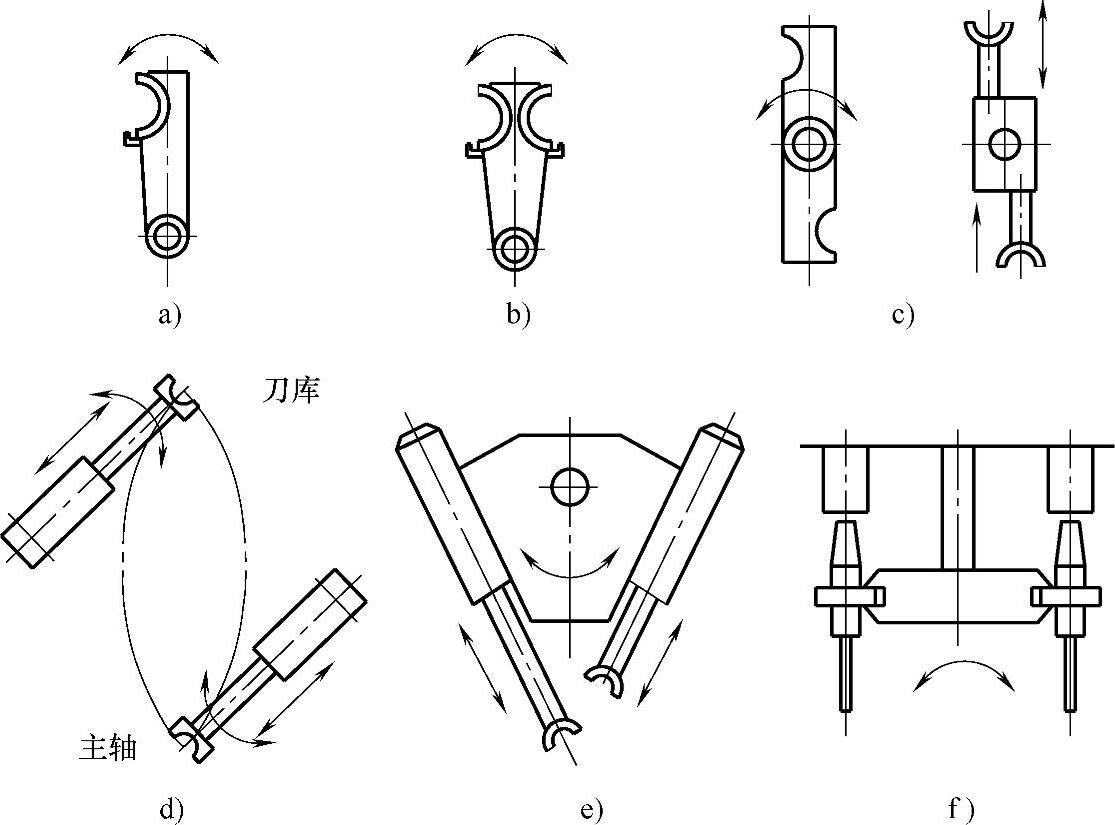
图3-43 各种形式的机械手
a)单臂单爪回转式 b)单臂双爪回转式 c)双臂回转式 d)双机械手 e)双臂往复交叉式 f)双臂端面夹紧式
1)单臂单爪回转式机械手。单臂单爪回转式机械手的手臂可以回转不同的角度,进行自动换刀,手臂上只有一个卡爪,无论在刀库上或是在主轴上,均靠这一个卡爪来装刀及卸刀,因此,换刀时间较长,见图3-43a。
2)单臂双爪回转式机械手。单臂双爪回转式机械手的手臂上有两个卡爪,两个卡爪有所分工,一个卡爪只执行从主轴上取下“旧刀”送回刀库的任务。另一个卡爪则执行由刀库取出“新刀”送到主轴的任务,其换刀时间较上述单爪回转式机械手要少,见图3-43b。
3)双臂回转式机械手。双臂回转式机械手的两臂各有一个卡爪,两个卡爪可同时抓取刀库及主轴上的刀具,回转180°后又同时将刀具放回刀库及装入主轴。换刀时间较以上两种单臂机械手均短,是最常用的一种形式。图3-43c右边的一种机械手在抓取或将刀具送入刀库及主轴时,两臂可伸缩。
4)双机械手。双机械手相当于两个单臂单爪机械手,互相配合起来进行自动换刀。其中一个机械手从主轴上取下“旧刀”送回刀库,另一个机械手由刀库取出“新刀”装入机床主轴,见图3-43d。
5)双臂往复交叉式机械手。双臂往复交叉式机械手的两手臂可以往复运动,并交叉成一定角度。一个手臂从主轴上取下“旧刀”送回刀库,另一个手臂由刀库取出“新刀”装入机床主轴。整个机械手可沿某导轨直线移动或绕某个转轴回转,以实现刀库与主轴间的运刀工作,见图3-43e。
6)双臂端面夹紧式机械手。双臂端面夹紧式机械手只是在夹紧部位上与前几种不同。前几种机械手均靠夹紧刀柄的外圆表面以抓取刀具,这种机械手则夹紧刀柄的两个端面,见图3-43f。
在各种类型的机械手中,双臂回转机械手最为常用。其手的结构有钩手如图3-44a所示、抱手如图3-44b所示、伸缩手如图3-44c所示和叉手如图3-44d所示。这几种机械手能够完成抓刀、拔刀、回转、插刀以及返回等全部动作。为了防止刀具掉落,各机械手的活动爪都必须带有自锁机构。由于双臂回转机械手的动作比较简单,而且能够同时抓取和装卸机床主轴和刀库中的刀具,因此,换刀时间可以进一步缩短。(https://www.xing528.com)
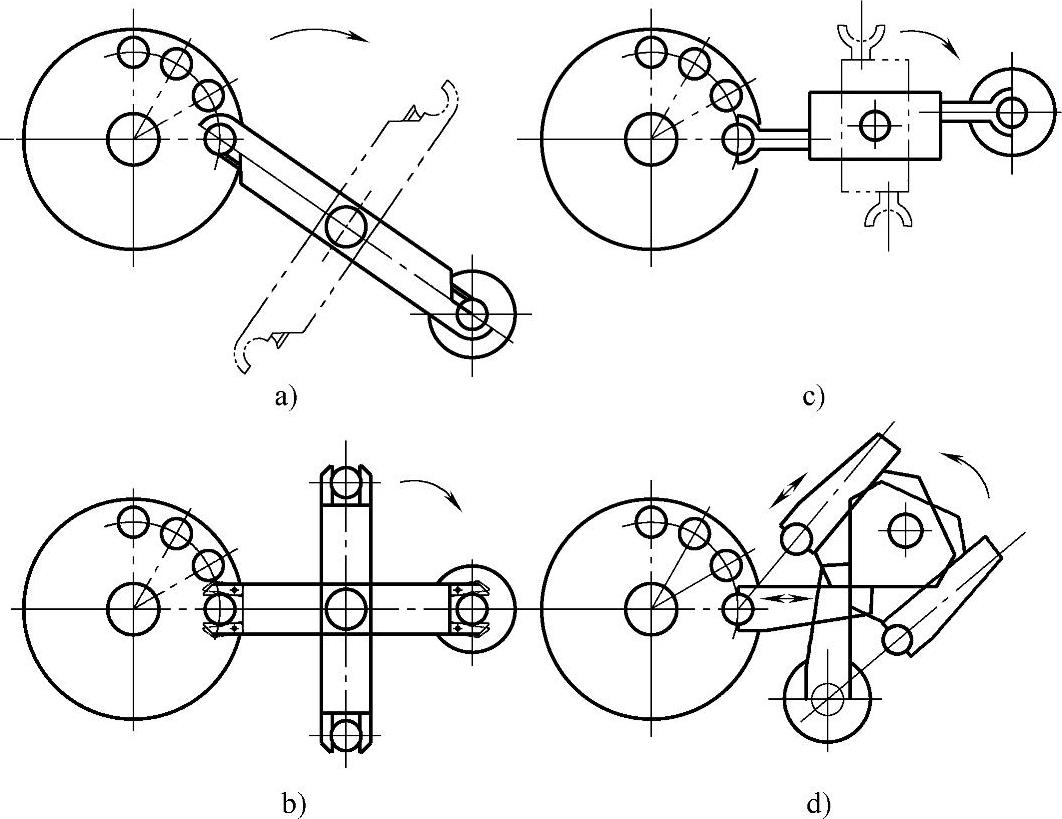
图3-44 双臂机械手常用机构
图3-45是双刀库机械手换刀装置,其特点是用两个刀库和两个单臂机械手进行工作,因而机械手的工作行程大为缩短,有效地节省了换刀时间。还由于刀库分设两处使布局较为合理。
根据各类机床的需要,自动换刀数控机床所使用的刀具的刀柄有圆柱形和圆锥形两种。为了使机械手能可靠地抓取刀具,刀柄必须有合理的夹持部分,而且应当尽可能使刀柄标准化。图3-46所示是常用的两种刀柄结构。V形槽夹持结构如图3-46a所示,适用于图3-43的各种机械手,这是由于机械手爪的形状和V形槽能很好地吻合。使刀具能保持准确的轴向和径向位置,从而提高了装刀的重复精度。法兰盘夹持结构如图3-46b所示,适用于钳式机械手装夹,这是由于法兰盘的两边可以同时伸出钳口,因此,在使用中间辅助机械手时能够方便地将刀具从一个机械手传递给另一个机械手。
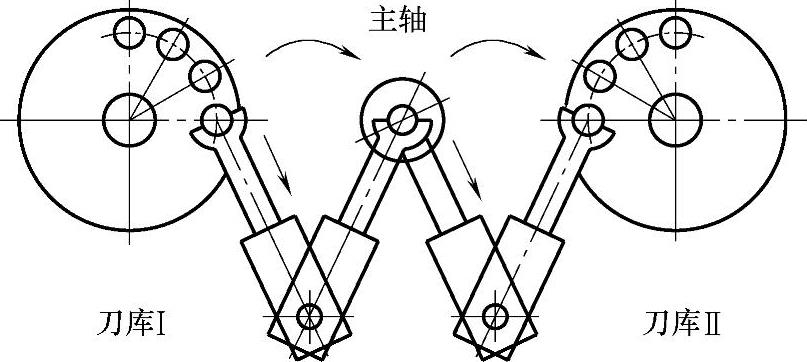
图3-45 双刀库机械手换刀装置
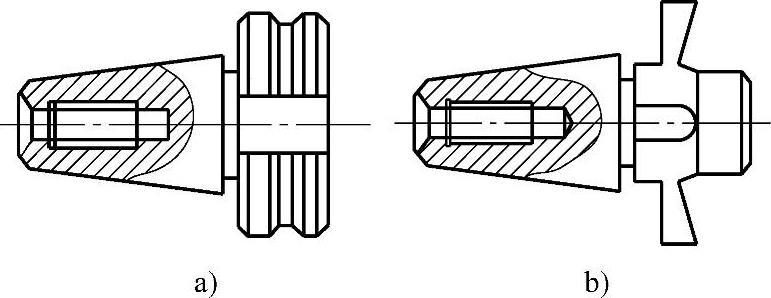
图3-46 刀柄结构
a)V型槽式 b)法兰盘式
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。