



本章设计的机器人PIC单片机系统已经集成了一个完整的单片机系统,并且具有环境感知、语音交互、电动机控制以及串口通信接口。利用该平台可以快速地建立一个物联网节点,并通过ZigBee或无线串口与其他节点实现资源共享。图5-3所示为系统设计框图。
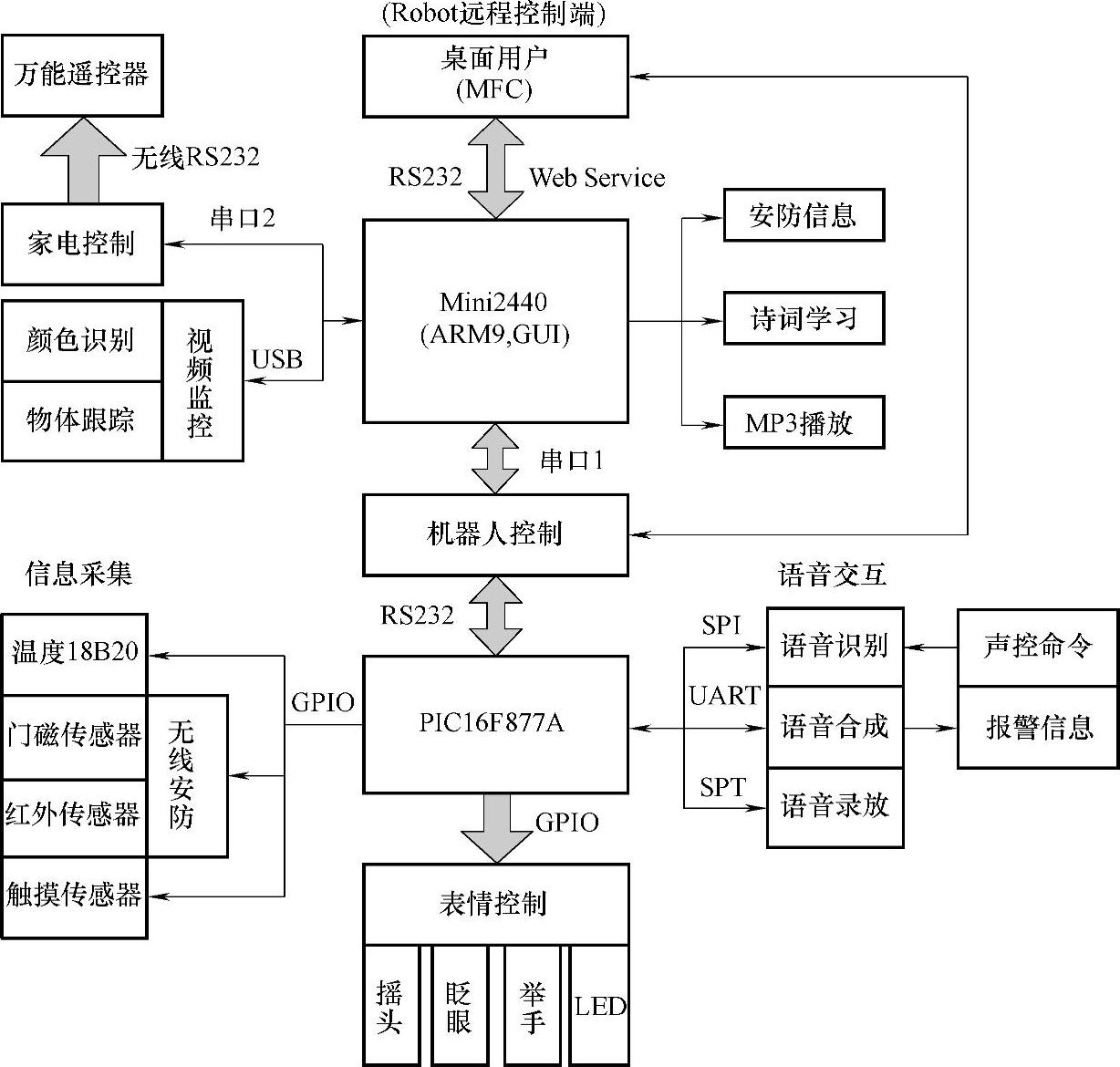
图5-2 系统总体设计框图
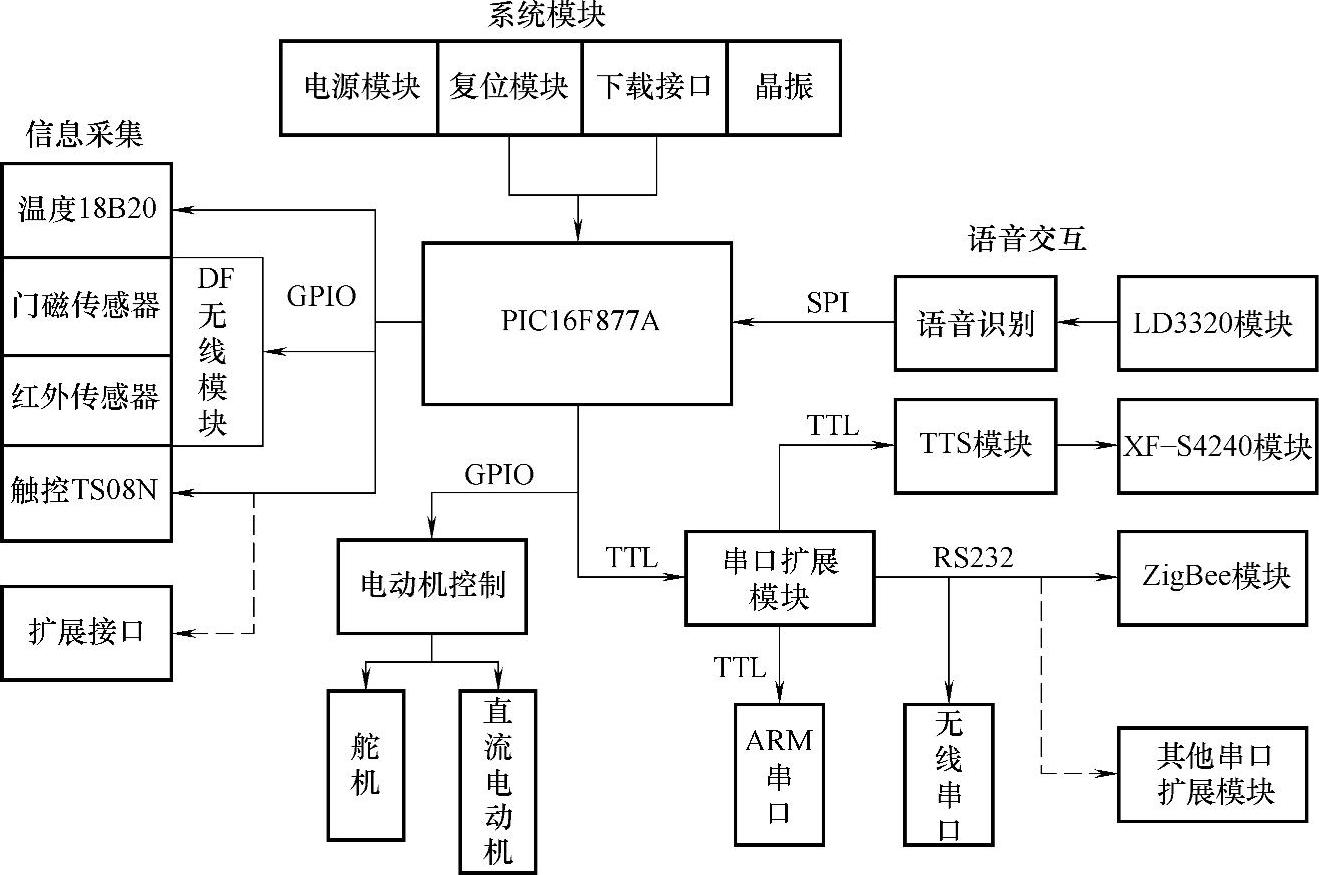
图5-3 PIC系统设计框图
1.单片机最小系统设计
本系统选用单片机的型号为PIC16F877A,采用TQFP封装,共有44引脚,主要使用了UART接口、SPI接口以及GPIO接口,SPI接口分配给语音识别,GPIO接口通过译码电路控制多个模块的选择以及电动机和无线接口,UART接口用于同PC和ARM系统通信。本系统还集成了程序下载接口和备用的GPIO接口。PIC模块原理图如图5-4所示。
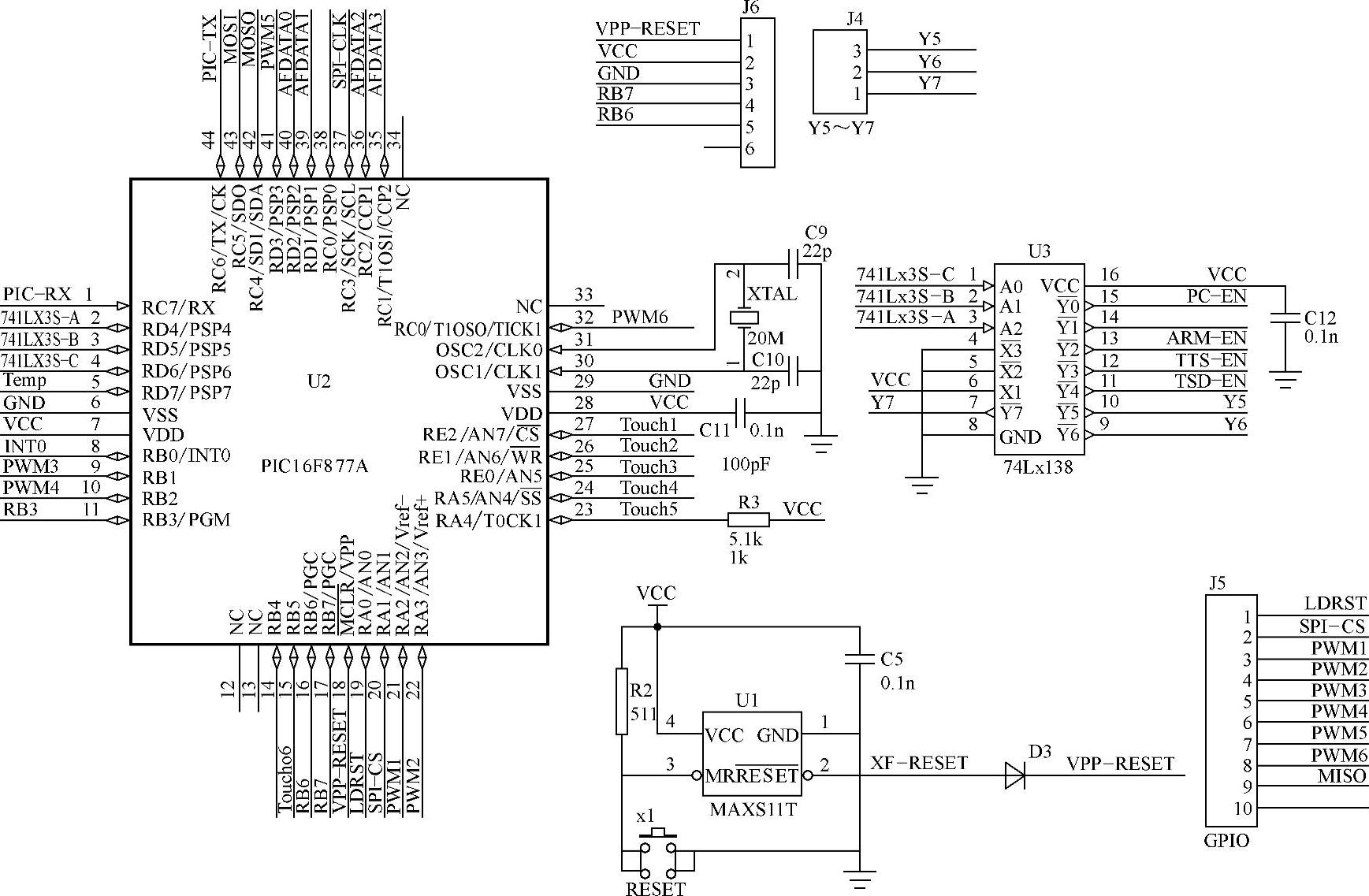
图5-4 PIC单片机模块
2.电源电路设计
本系统由于单片机采用5V电源,语音识别与合成模块采用3.3V电源,所以利用线性稳压芯片LM1117-5和LM1117-3.3为整个电路提供电源。其原理图如图5-5所示。
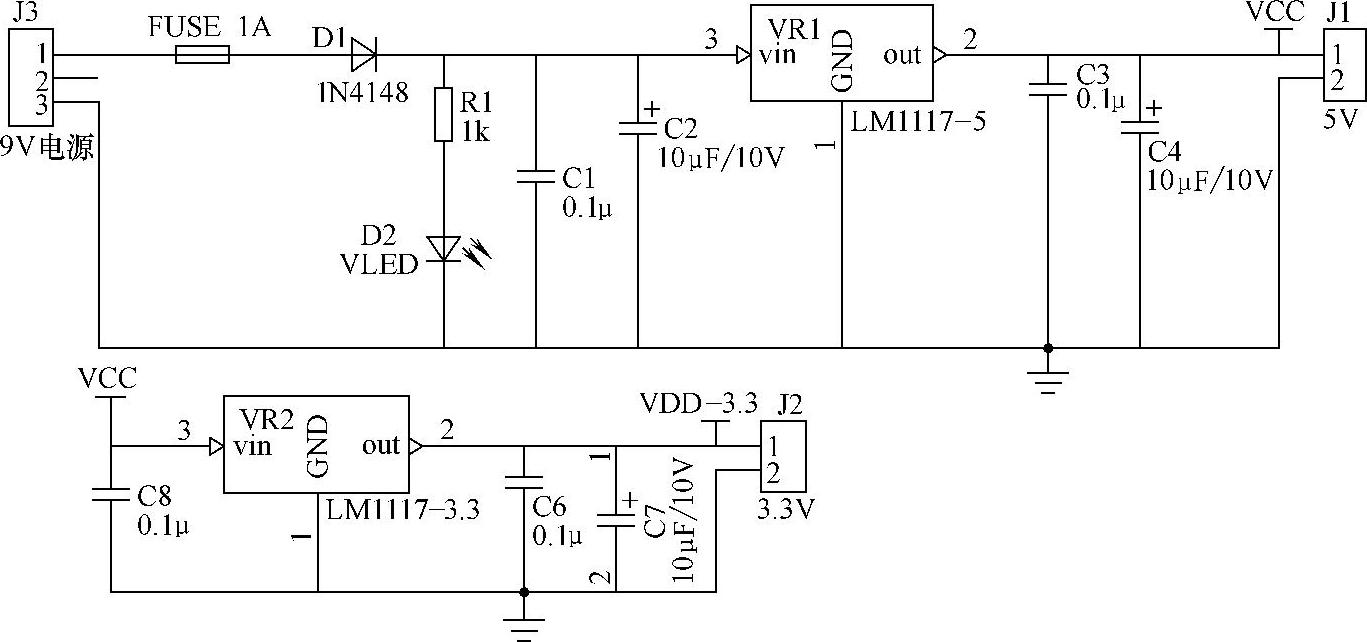
图5-5 电源模块
3.语音识别电路设计
本系统采用ICRoute提供的LD3320非特定人语音识别芯片来实现语音识别功能,该芯片集成了语音识别处理器和一些外部电路,包括A-D、D-A转换器、传声器接口、声音输出接口等。本芯片不需要外接任何的辅助芯片如Flash、RAM等,直接集成在现有的产品中即可以实现语音识别/声控/人机对话功能。每次识别最多可以设置50项候选识别句,每个识别句可以是单字、词组或短句,长度为不超过10个汉字或者79B的拼音串。并且,识别的关键词语列表是可以任意动态编辑的。与PIC单片机通过SPI接口通信。
因为语音识别芯片的引脚输入电压为3.3V,PIC单片机管脚电压为5V,采用74LVC245和74HCT245实现5V到3.3V的转换。同理ARM串口引脚电压为3.3V,与PIC单片机通信一样需要转换。其原理图如图5-6所示。
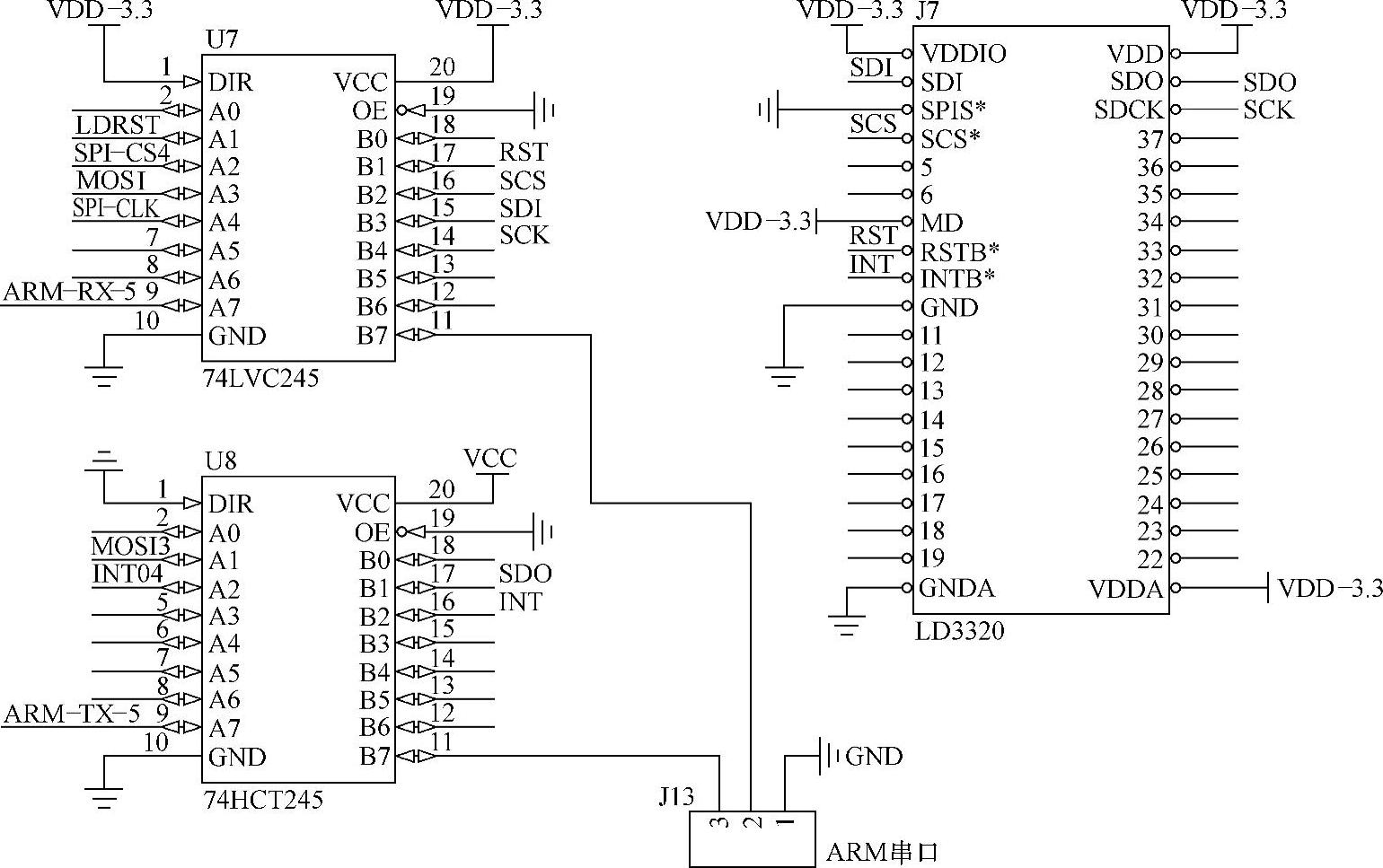
图5-6 语音识别模块
4.语音合成与录放电路设计(https://www.xing528.com)
本系统中的语音合成部分采用XF-S4240模块来实现。模块通过串口与PIC单片机进行通信,以达到机器人开口说话的目的。
语音录放芯片可以存储8min的声音,并且在软件上可以方便地控制录放以及语音的长短,芯片与单片机通过SPI接口通信,最后声音通过LM386进行功率放大。其原理图如图5-7所示。
5.电动机接口电路设计
本章介绍的机器人的电动机部分包括1路舵机和4路直流电动机,舵机用于控制机器人的头部,直流电动机用于控制机器人的眼睛、嘴、眼皮。
标准的舵机有3条导线,分别是控制线、电源线、地线。电源线和地线用于提供舵机内部的直流电动机和控制线路所需的能源,电压通常介于4~7.2V,控制线的输入是一个宽度可调的周期性方波脉冲信号。当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。其PWM的周期在20ms,脉宽在1.5~2.5ms以内可以使舵机从0°转到180°。直流电动机采用L298N作为驱动芯片,通过光耦合器TLP521-4与单片机引脚相连,采用光电隔离主要是防止因电动机停止转动瞬间产生的尖端脉冲对单片机的影响。其原理图如图5-8所示。
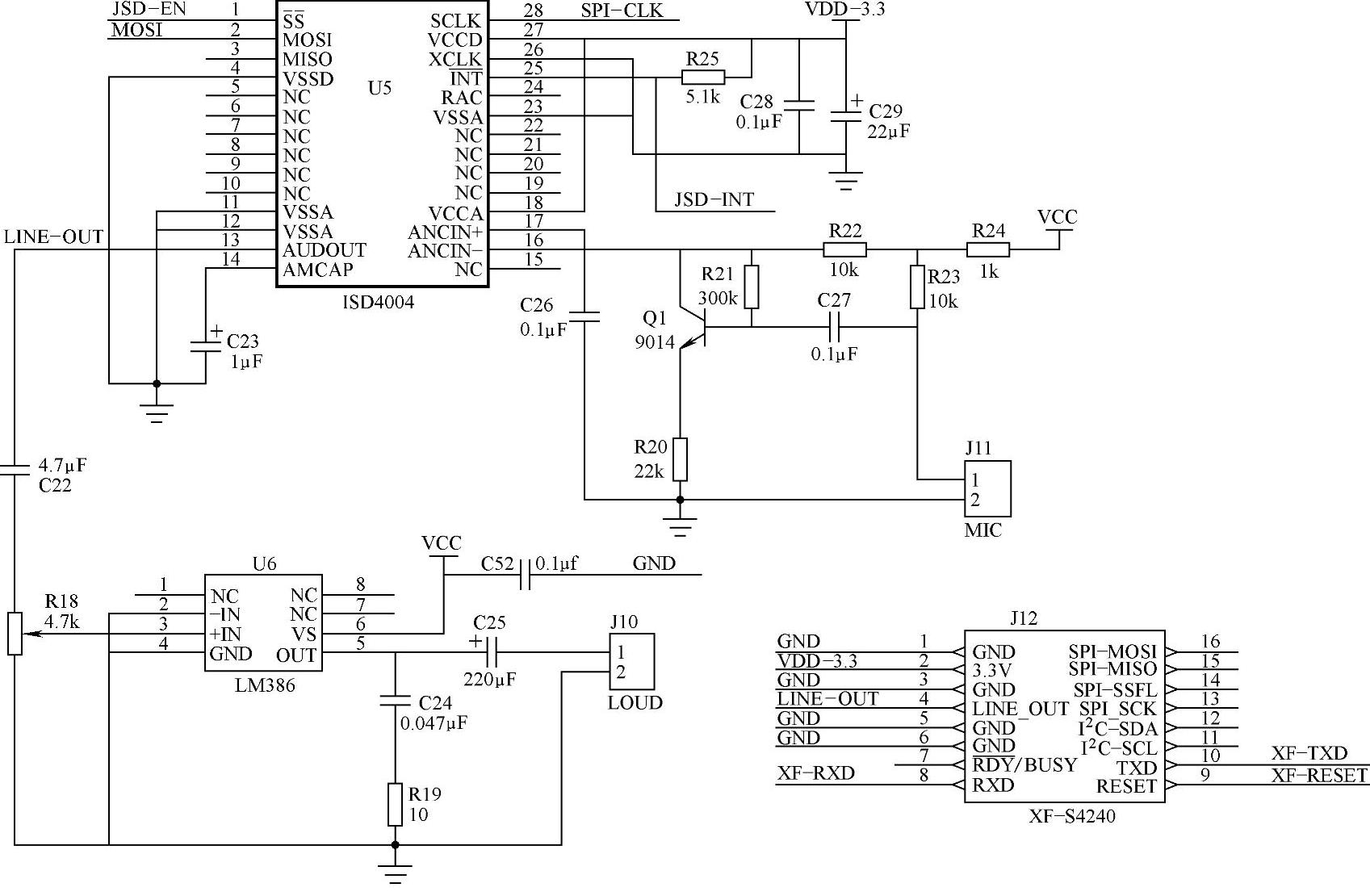
图5-7 语音合成与录放模块
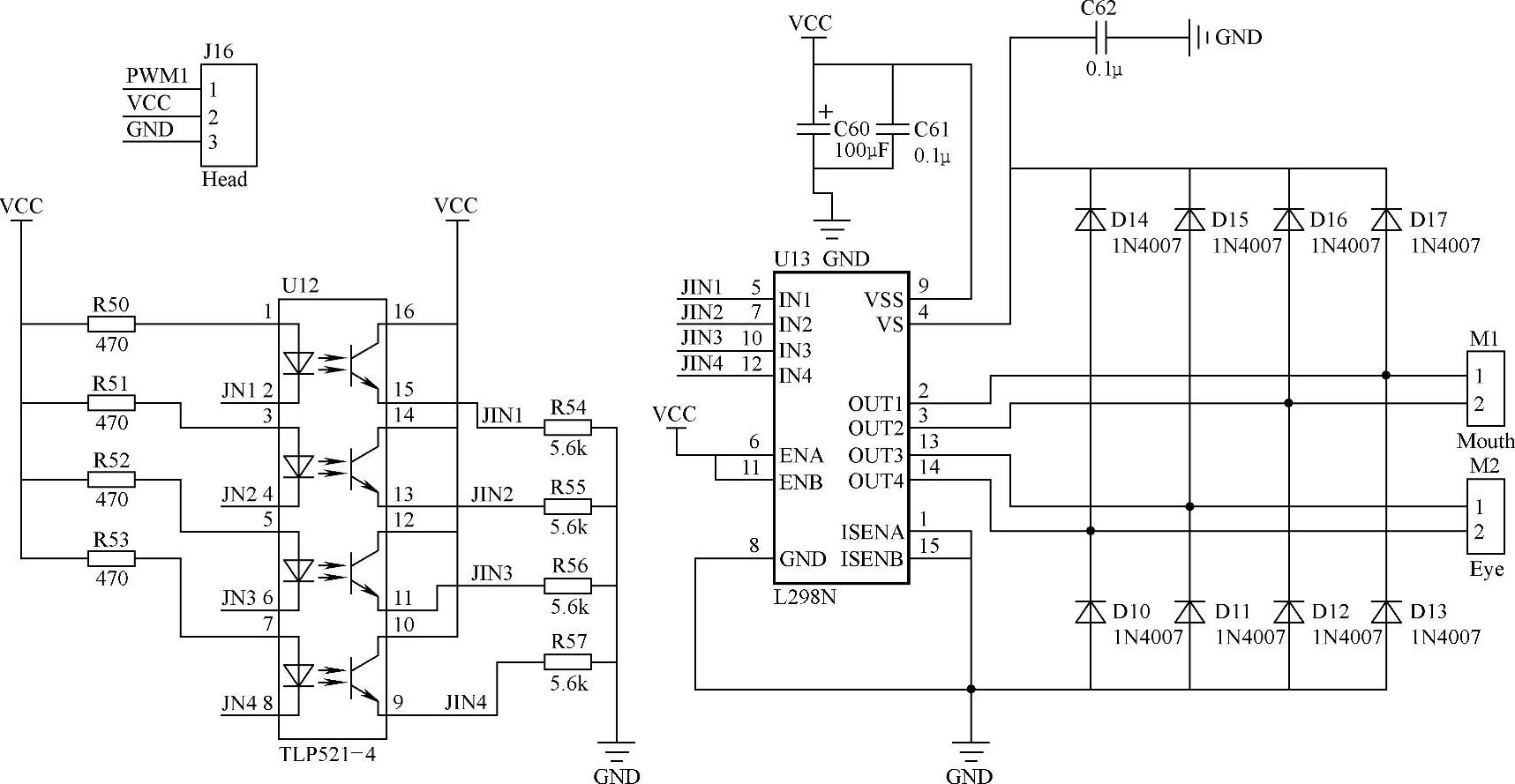
图5-8 电动机控制模块
6.传感器采集电路设计
本系统的传感器采集电路包括触摸传感器、温度传感器和无线传感器网络。
触摸传感器模块使用的是八通道电容感应式触控芯片TS08N。使用该芯片,通过人体(手指)感应使输入电容发生变化,与内部基准电容比较,将差值进行放大,在输出端产生高低电平变化,从而实现对模拟信号的控制。
温度传感器采用DS18B20,其测量范围为-55~125℃,分辨率达0.0625℃,CPU只需一根端口线就能与多个DS18B20通信,占用MCU资源少。
无线传感器网络主要用于安防,包括无线红外传感器、无线门磁传感器、无线烟雾传感器、无线燃气传感器。各个传感器内部都有一个带编码的无线发射模块,在底层电路中利用单片机的I/O口将无线接收模块接收到的安防传感器的信息进行处理。其原理图如图5-9所示。
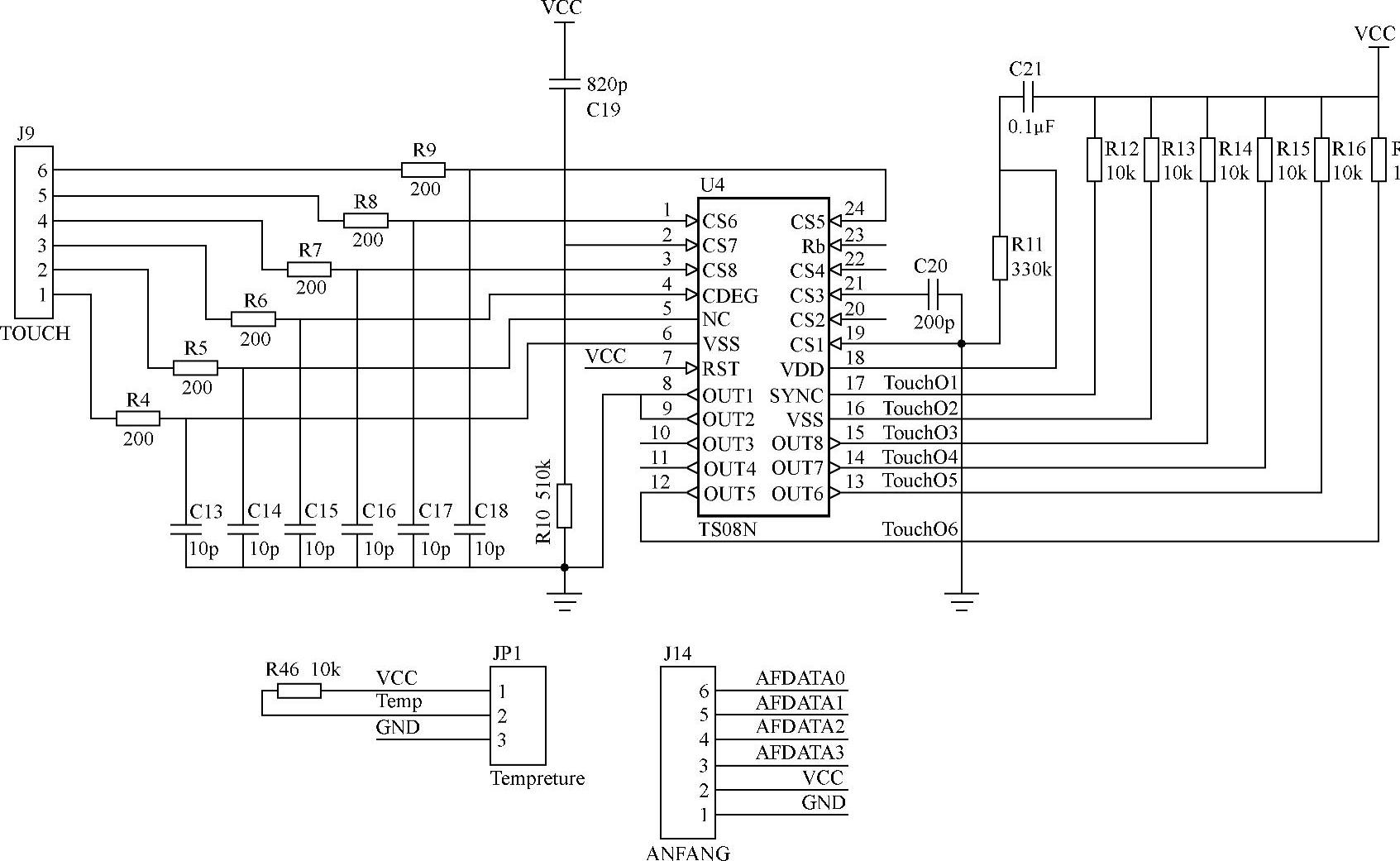
图5-9 传感器信息采集模块
7.串口通信电路设计
本系统采用的PIC单片机只有一个串口,而单片机需要与PC、语音合成模块、ARM等进行串口通信,因此需要对单片机的串口进行扩展,解决方案就是对每一个模块添加一个使能信号,使之与PIC的串口能够复用,其原理图如图5-10所示。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。