



ADAMS/View中有两种运动副运动:移动和转动。对于移动运动,ADAMS/View约束构件1沿构件2的z轴的移动,对于旋转运动,约束构件1按右手定则绕构件2的z轴旋转,要求构件1的z轴必须始终同构件2的z轴保持平行。当夹角为零时,构件1的x轴同构件2的x轴平行。
创建运动副运动的方法如下:
(1)在运动工具集或约束浮动对话框中选择运动副移动工具图标 或运动副转动运动工具图标
或运动副转动运动工具图标 。
。
(2)在设置栏输入速度值。ADAMS/View的旋转运动默认值为30.0°/s,移动运动默认值为10.0mm/s,如图4-12所示。
如果想用函数表达式或自编子程序定义运动值,可以将鼠标右击Speed输入栏,从弹出的菜单中选择Parameterize项,再选择Expression Builder命令,此时显示函数输入对话框,如图4-13所示。利用函数输入对话框可以输入各种函数。
(3)鼠标左键选择要施加运动的运动副,完成连接运动设置。
ADAMS/View允许对创建的运动副运动进行修改。选中要修改的运动副运动,单击鼠标右键弹出快捷菜单,选择Modify命令,弹出运动修改对话框。以转动运动为例,修改对话框如图4-14所示。
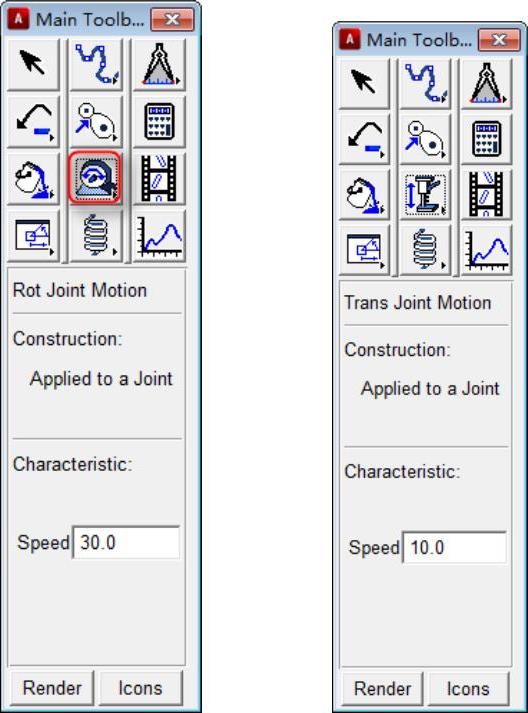
图4-12 设置运动副
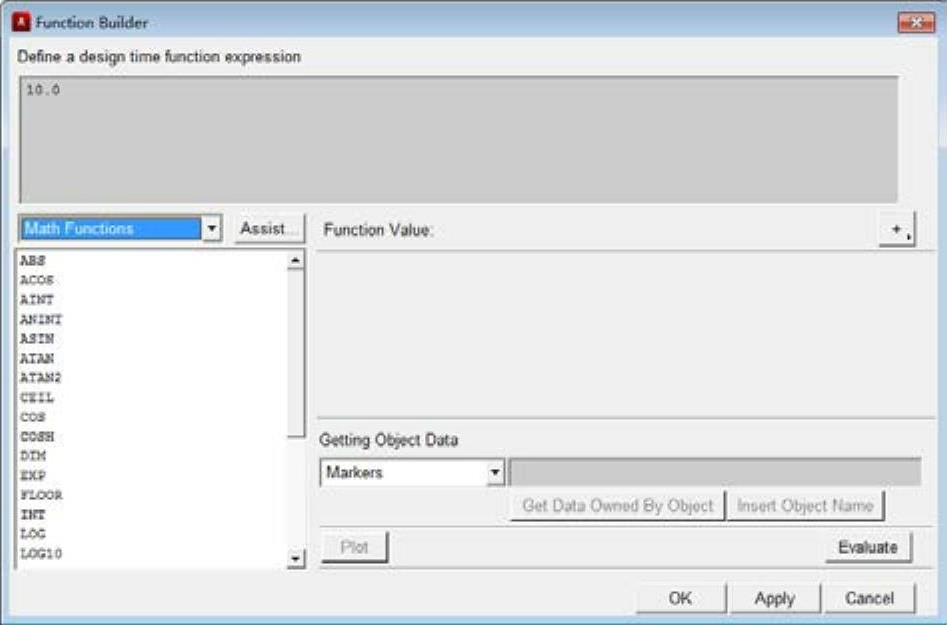
图4-13 函数输入对话框(https://www.xing528.com)
可以修改运动副运动以下特性:
●Name栏可以修改运动名称。
●Joint栏可以修改运动作用的运动副,此时运动类型Joint Type也随运动副的改变而变化。
●Direction栏可以修改运动的方向,包括旋转或移动。
●在Define Using栏修改运动值输入的方法。
●在Function(time)栏输入运动值。
●在Type栏选择定义运动值的方法。
●在DisplacementIC栏输入初始位移,或在Velocity IC栏,输入初始速度。
选择OK按钮,完成运动副运动的修改。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。