



1.概述
由于数控车床加工的零件通常为横截面为圆形的轴类零件,因此数控车床的编程可用直径编程方式,也可以用半径编程方式,车床出厂时均设定为直径编程,所以在编程时与X轴有关的各项尺寸一定要用直径值编程。
如果需用半径编程,则改变系统中相关的几项参数或用指令,使系统处于半径编程状态。显然半径编程比较麻烦,因为编程时把零件图样上的直径尺寸除以2再去编程,给编程带来不必要的麻烦,且易出现失误。
所以,目前数控车床上广泛采用直径编程方式。下面以FANUC(发那科)0i Mate TC系统车床编程车床数控系统为例进行介绍。
2.绝对坐标与增量坐标、混合坐标
(1)绝对坐标
格式:(Xa,Zb) (有方向性)
将刀具运动位置的坐标值表示为相对于坐标原点的距离,这种坐标的表示法称之为绝对坐标表示法。
(2)增量坐标 (或相对坐标)
格式:(Ua,Wb)(有方向性)
增量坐标表示法:将刀具运动位置的坐标值表示为相对于前一位置坐标的增量,即为目标点绝对坐标值与当前点绝对坐标值的差值,这种坐标的表示法称之为相对坐标表示法。数控系统用X、Z表示绝对坐标代码,用U、W表示相对坐标代码。在一个加工程序中可以混合使用这两种坐标表示法编程。
(3)混合坐标
格式:(Ua,Zb)或(Xa,Wb) (有方向性)
绝对坐标和增量坐标混合起来表示刀具运动位置的坐标值,这种坐标的表示法称之为混合坐标表示法。
【实例】 用绝对坐标和相对坐标来表达图1-18各个节点的坐标
绝对坐标:(假设O点位坐标原点)
O(X0,Z0)(https://www.xing528.com)
A(X20,Z0) B(X20,Z-25)
C(X36,Z-25) D(X36,Z-40)
E(X50,Z-40) F(X50,Z-60)
相对坐标:(假设O点位坐标原点)
O(X0,Z0)
A(U20,W0) B(U0,W-25)
C(U16,W0) D(U0,W-15)
E(U14,W0) F(U0,W-20)
混合坐标:(假设O点位坐标原点)
O(X0,Z0)
A(X20,W0)或(U20,Z0) B(X20,W-25)或(U0,Z-25)
C(X36,W0)或(U16,Z-25) D(X36,W-15)或(U0,Z-40)
E(X50,W0)或(U14,Z-25) F(X50,W-20)或(U0,Z-60)
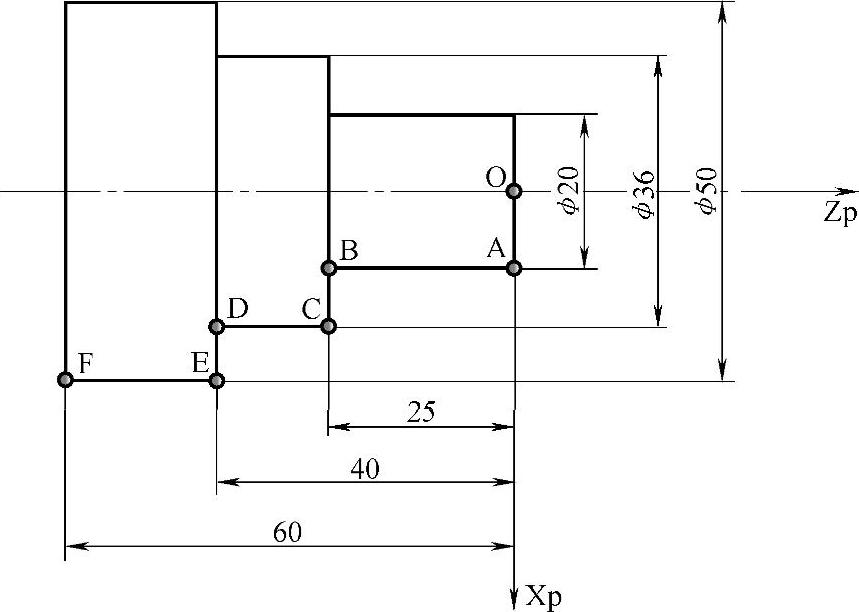
图1-18 坐标示意
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。