



1.步距角α
指每给一个脉冲信号,电动机转子应转过角度的理论值。它取决于电动机的结构和控制方式。步距角可按下式计算:

式中 m为定子相数;z为转子齿数;k为通电系数,若连续两次通电相数相同为1,若不同则为2。
数控机床所采用步进电动机的步距角一般都很小,如:3°/1.5°,1.5°/0.75°,0.72°/0.36°等,是步进电动机的重要指标。步进电动机空载且单脉冲输入时,其实际步距角与理论步距角之差称为静态步距角误差,一般控制在±10'~30'的范围内。
2.步矩角特性、最大静态转矩Mjmax和起动转矩Mq
当步进电动机处于通电状态时,转子处在不动状态,即静态。如果在电动机轴上施加一个负载转矩M,转子会在载荷方向上转过一个角度θ,转子因而受到一个电磁转矩Mj的作用与负载平衡,该电磁转矩Mj称为静态转矩,该角度θ称为失调角。步进电动机单相通电的静态转矩Mj随失调角θ的变化曲线称为矩角特性,如图5-4所示,画出了三相步进电动机按A→B→C→A……方式通电时A、B、C各相的矩角特性。各相矩角特性差异不大,否则会影响步距精度及引起低频振荡。当外加转矩取消后,转子在电磁转矩作用下,仍能回到稳定平衡点θ=0。矩角特性曲线上的电磁转矩的最大值称为最大静转矩Mjmax,Mjmax是代表电动机承载能力的重要指标,Mjmax越大,电动机带负载的能力越强,运行的快速性和稳定性越好。
由图5-4可见,相邻两条曲线的交点所对应的静态转矩是电动机运行状态的最大起动转距Mq,当负载力矩小于Mq时,步进电动机才能正常起动运行,否则将会造成失步。一般地,电动机相数的增加会使矩角特性曲线变密,相邻两条曲线的交点上移,会使Mq增加;采用多相通电方式,即变m相m拍通电方式为m相2m拍通电方式,会使起动转距Mq增加。
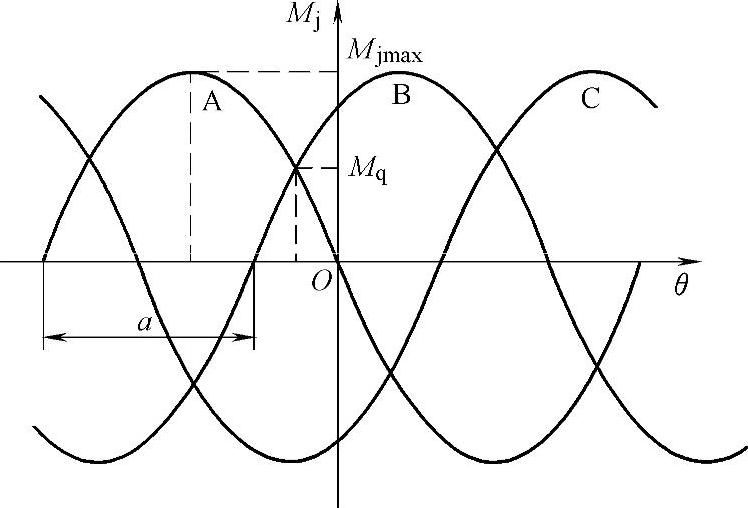
图5-4 三相步进电动机的各相矩角特性(https://www.xing528.com)
3.起动频率fq和起动时的惯频特性
空载时,步进电动机由静止突然起动、并进入不失步的正常运行状态所允许的最高频率,称为起动频率或突跳频率fq,是反映步进电动机快速性能的重要指标。空载起动时,步进电动机定子绕组通电状态变化的频率不能高于该起动频率。原因是频率越高,电动机绕组的感抗(xL=2πfL)越大,使绕组中的电流脉冲变尖,幅值下降,从而使电动机输出力矩下降。
起动时的惯频特性是指电动机带动纯惯性负载时起动频率和负载转动惯量之间的关系。一般来说,随着负载惯量的增加,起动频率会下降。如果除了惯性负载外还有转矩负载,则起动频率将进一步下降。
4.运行矩频特性
步进电动机起动后,其运行速度能跟踪指令脉冲频率连续上升而不丢步的最高工作频率,称为连续运行频率,其值远大于起动频率。运行矩频特性是描述步进电动机在连续运行时,输出转矩与连续运行频率之间的关系,它是衡量步进电动机运转时承载能力的动态指标,如图5-5所示。图中每一频率所对应的转矩称为动态转矩。从图中可以看出,随着运行频率的上升,输出转矩下降,承载能力下降。当运行频率超过最高频率时,步进电动机便无法工作。
5.加、减速特性
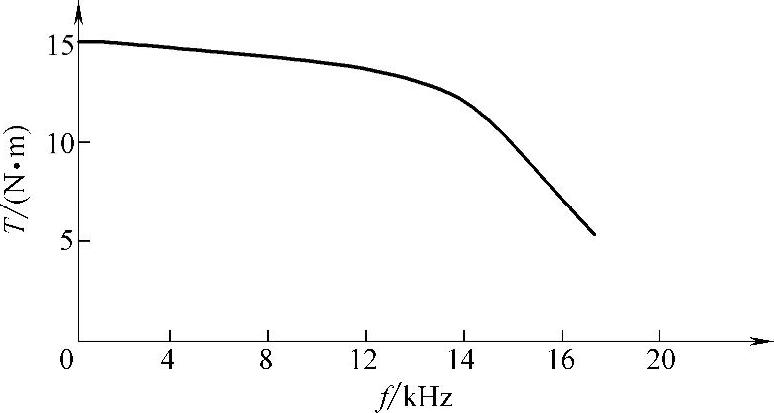
图5-5 步进电动机的运行矩频特性
步进电动机的加减速特性是描述步进电动机由静止到工作频率和由工作频率到静止的加、减速过程中,定子绕组通电状态的变化频率与时间的关系。当要求步进电动机起动到大于起动频率的工作频率时,变化速度必须逐渐上升;同样,从最高工作频率或高于起动频率的工作频率停止时,变化速度必须逐渐下降。逐渐上升和逐渐下降的加速时间、减速时间不能过小,否则会出现失步或超步。目前,主要通过软件实现步进电动机的加减速控制。常用的加减速控制实现方法有指数规律和直线规律加减速控制,指数规律加减速控制一般适用跟踪响应要求较高的切削加工中;直线规律加减速控制一般适用速度变化范围较大的快速定位方式中。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。