



首先创建系统有限元形式的动力学模型,结构模态计算以后先提取模态振型,并结合模态坐标下的系统动力学求得的模态坐标的时间历程,根据线性系统模态叠加的思想,将模态振型叠加转化为节点力的线性叠加,然后获得模态结构应力,下面给出具体步骤。
第一步:模态节点力的获得。
前面已经提到结构应力的计算需要节点力,既然模态节点位移可以叠加,那么模态节点力也可以叠加。节点力是单元之间的作用力,可以由下式求出:
{Fe}=[Ke]{u} (9-12)
式中 [Ke]——第5章中定义的局部坐标系下的单元刚度矩阵;
{u}——局部坐标下的节点位移向量;
{Fe}——单元局部坐标下的单元节点力向量。
从某阶模态向量中提取指定单元e的节点相关的位移向量{uϕ}后,再利用坐标变换矩阵[B]就可以变换获得全局坐标下模态节点力:
{Fe}=[B]T[Ke][B]{uϕ} (9-13)
当节点被多个单元共享时,需要采用隔离体的办法对相邻的节点力进行合成。
第二步:模态节点力的坐标变换。
系统坐标系(x,y,z)下求解的焊趾处模态节点力向量{F}j和力矩向量{M}j需要变换到以焊线定义的局部坐标下,这是计算结构应力的一个必要步骤。
全局坐标系到焊线局部坐标的坐标变换矩阵[T],可以通过有限元网格模型的节点坐标获得。注意焊线局部坐标的y′向始终与焊线的切线方向垂直,x′方向与焊线相切,如图9-2所示。
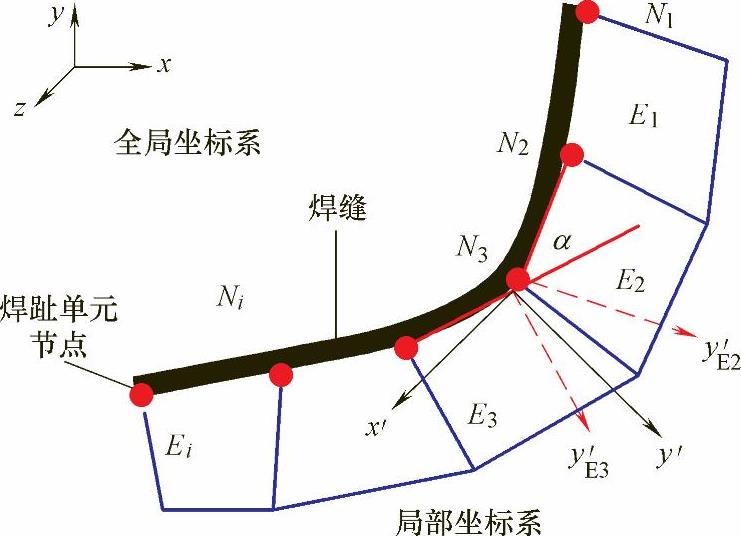
图9-2 基于焊线的局部坐标示意(https://www.xing528.com)
接着将全局坐标下的节点力向焊缝局部坐标系(x′,y′,z′)变换,变换后得到焊线局部坐标系节点力向量{F′}j和力矩向量{M′}j。
第三步:模态结构应力的获得。
基于节点载荷及相邻节点距离l以及定义的长度等效矩阵L,可以进行节点载荷等效计算,即:将每一阶模态焊线节点对应的焊线局部坐标下y′轴方向的节点力转化为该方向单元边上的线载荷fj′[见第5章式(5-20)],将每一阶模态对应的每个节点焊线局部坐标下的x′轴方向的节点力矩,转化为该方向单元边上的线力矩mj′[见第5章式(5-21)]。注意,线载荷fj′及线力矩mj′值对节点数量n不敏感。

由于已经获得了焊线上的节点线力及线力矩,这样就可以基于结构应力的计算公式最终获得与第j阶模态对应的每个节点上的模态结构应力向量σis。

式中 i——焊线节点编号;
n——沿焊线分布的总节点数;
σim——模态膜应力;
σib——模态弯曲应力。
令A为板厚向量,式(9-15)还可以采用矩阵形式简洁地表示为模态结构应力向量:
{σs}j=[T]{{F}j,{M}j}[L]-1A (9-16)
模态结构应力σis也是一种载荷响应,不过是通过模态坐标时间历程的叠加获得的,它的单位与结构应力的单位一样,且是由规一化以后的模态振型向量导出的。
由于用于坐标变换的T、L及L-1矩阵只与焊线位置有关,在模态结构应力计算过程中它们都是不随时间变化的常量矩阵,因此模态节点力与模态结构应力之间存在线性关系,这也证明了模态结构应力的叠加是成立的,对上述步骤加以归纳给出了疲劳寿命预测流程,如图9-3所示。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。