



1.绝对定位和相对定位的区别?
答:相对定位是指在轴当前位置的基础上正方向或负方向移动一段距离;绝对定位指的是当轴建立了坐标系后,轴的每个位置都有固定的坐标,无论轴的当前位置值是多少,执行了相同设定位置的绝对运行指令后,轴最终都定位到同一个位置。
2.如果没有原点开关,可以使用绝对定位指令“MC_MoveAbsolute”吗?
答:可以,用“MC_Home”指令的Mode=0和Mode=1方式,让轴直接回原点建立坐标系,然后可以执行“MC_MoveAbsolute”指令进行绝对运动。
3.工艺对象数据块中的轴已回原点信号“StatusBits.HomingDone”,何时会丢失?
答:发生以下情况时,轴已回原点信号“StatusBits.HomingDone”会丢失。
•通过“MC_Power”运动控制指令禁用轴。
•在自动模式和手动控制之间切换,也就是控制面板和程序切换时会丢失回原点已完成信号。
•在主动回原点期间。在成功完成回原点操作之后,轴回原点将再次可用。
•CPU重新启动后。
4.PTO模式下执行回原点指令时,为什么轴碰到原点开关不执行回原点操作?
答:可能的原因如下:
•原点开关失效,也就是说当轴碰到原点开关时,原点开关无信号输入。
•原点开关有效时间过短,根据DI点有效时间选择合适的滤波时间。
•在设备组态中禁用了参考点输入的沿中断。打开CPU的设备组态,检查参考点的输入是否选择了“启用上升沿检测”和“启用下降沿检测”。如果沿中断功能未使能,则删除轴组态中指定的输入,然后再次组态参考点的输入。
•寻找原点开关的速度过快,可以减小“逼近速度”和“参考速度”。
5.为什么轴在执行主动回原点命令时,轴碰到限位开关未反向掉头,而是直接停止轴运行?
答:可能的原因如下:
•没有使能“允许硬件限位开关处自动反转”的选项。
•工艺对象组态的硬件开关上/下限位输入点与实际的输入点不符。例:上限位组态为I0.0,下限位组态为I0.1,但实际I0.1为上限位,I0.0为下限位。(https://www.xing528.com)
•限位开关行程过短。轴在主动回原点期间到达硬件限位开关,轴将以组态的减速度减速,减速到启动/停止速度后反向运行寻找原点开关。如果限位开关行程过短,在行程内无法减速到启动/停止速度,在反向过中会再次碰到限位开关,如图12-83所示。这种情况可以通过增大加速度/减速度、降低寻参速度或增加限位开关行程解决。
6.如何保持PTO轴断电前的绝对位置?
答:S7-1200CPU每次上电后轴的位置都是0,不会保留断电前的位置值。需编程实现位置保持,可按照下面示例中的步骤操作。
•在全局DB块“绝对坐标”里建立Real类型变量“轴保持位置”并使能变量的保持性。
•在OB1中的最后一个网络,将轴的当前位置“ActualPosition”传送到建立的变量中,如图12-84所示。
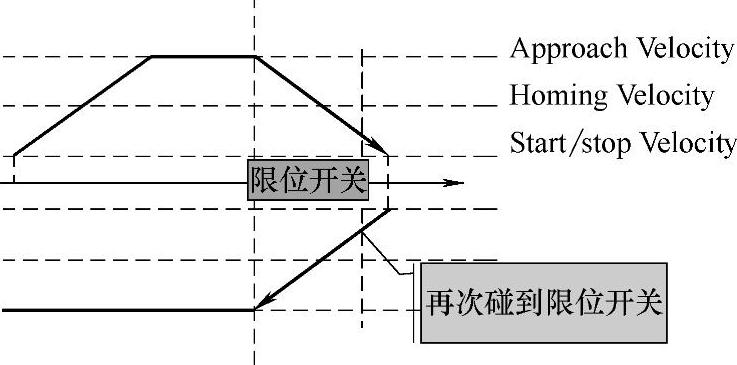
图12-83 反向碰到限位开关
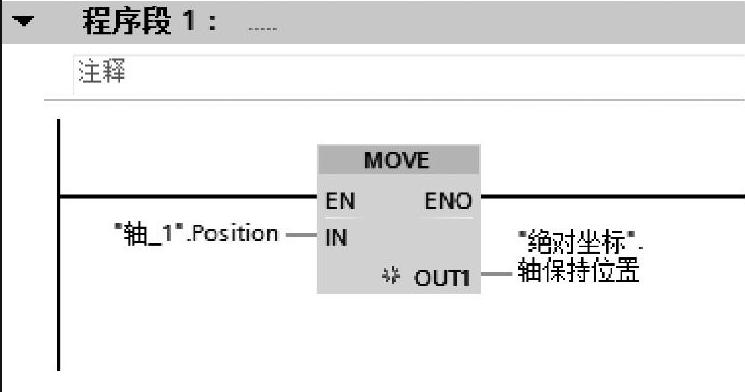
图12-84 将轴的当前位置“ActualPosition”传送到建立的变量中
•在启动OB100中,调用“MC_Power”指令使能轴,然后使用“MC_Home”指令的Mode0,重新装载断电前绝对位置,如图12-85所示。
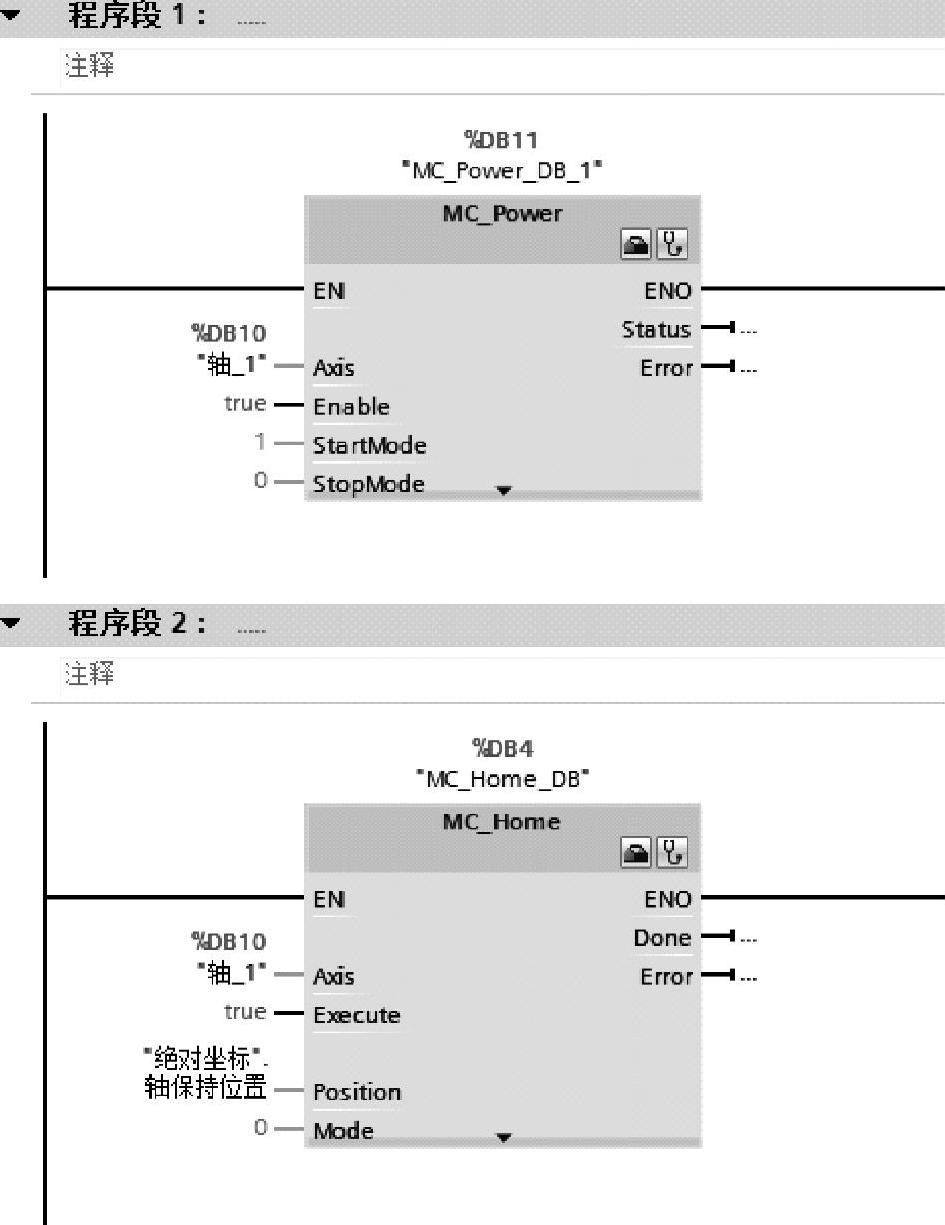
图12-85 OB100中重新装载断电前绝对位置
注意:
在OB1里,调用“MC_POWER”指令使用的背景DB必须与启动OB100里“MC_POWER”使用的背景DB相同。
7.闭环控制带有绝对值编码器的V90PN时,通过“MC_Home”指令是否可以执行Mode=2或3的回原点操作?
答:不可以,“MC_Home”指令会报错:ErrorID=“16#8404”,ErrorInfo=“16#0055”。可通过“MC_Home”指令Mode=6或7进行绝对值编码器的调节。
8.为何通过S7-1200 PTO方式控制V90PTI定位换向时有时会有丢失脉冲的情况?
答:S7-1200PTO方式控制V90PTI定位换向时,换向信号由高电平转换为低电平状态的时间取决于外围电路的输入电阻和电容,如果方向输出点的负载电流过小(应不小于10%),在高速时输出信号波形会发生畸变,换向切换时间过长,导致换向过程中的脉冲丢失。为确保换向时不丢失脉冲,同时保证脉冲输出信号波形不发生畸变,建议在SINAMICS V90PTI的方向控制信号38、39和脉冲信号36、37的端子间连接阻值为200~500Ohm,最小功率为5W的下拉电阻,接线参考图12-40。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。