



基于事件的仿真需要一系列的任务,这些任务由传感器触发按顺序排列或同时进行。每一项任务都通过一个触发事件及其相关的任务操作进行定义,进而控制或定义任务过程中的运动。
(1)触发器 每项任务都会由一个触发条件触发。触发条件可能取决于传感器的状态,也可能基于序列中某些其他任务的开始或结束。
(2)任务操作 在定义一个任务时可以指定下列操作:
● 【终止】 。终止一个零部件的运动。
。终止一个零部件的运动。
● 【马达】 。打开或关闭任意马达,或根据所选面更改马达的恒定速度。
。打开或关闭任意马达,或根据所选面更改马达的恒定速度。
● 【力】 。应用或终止加载任何力,或根据所选面更改马达的恒定力。
。应用或终止加载任何力,或根据所选面更改马达的恒定力。
● 【配合】 。对所选配合切换压缩状态。
。对所选配合切换压缩状态。
(3)时间线视图与基于事件的运动视图 为了定义任务,运动仿真中提供了【基于事件的运动视图】,用户可以在MotionManager工具栏中单击对应的按钮 。这个视图用于定义任务并设计系统的逻辑线路,如图11-7所示。
。这个视图用于定义任务并设计系统的逻辑线路,如图11-7所示。
基于视图的时间线提供了传统的带时间帧的运动仿真视图,指示开始和结束时间,以及仿真部件的动作。当基于事件的仿真计算完毕时,将产生事件的时间帧序列,而且这个序列也是仿真的重要结果之一,如图11-8所示。
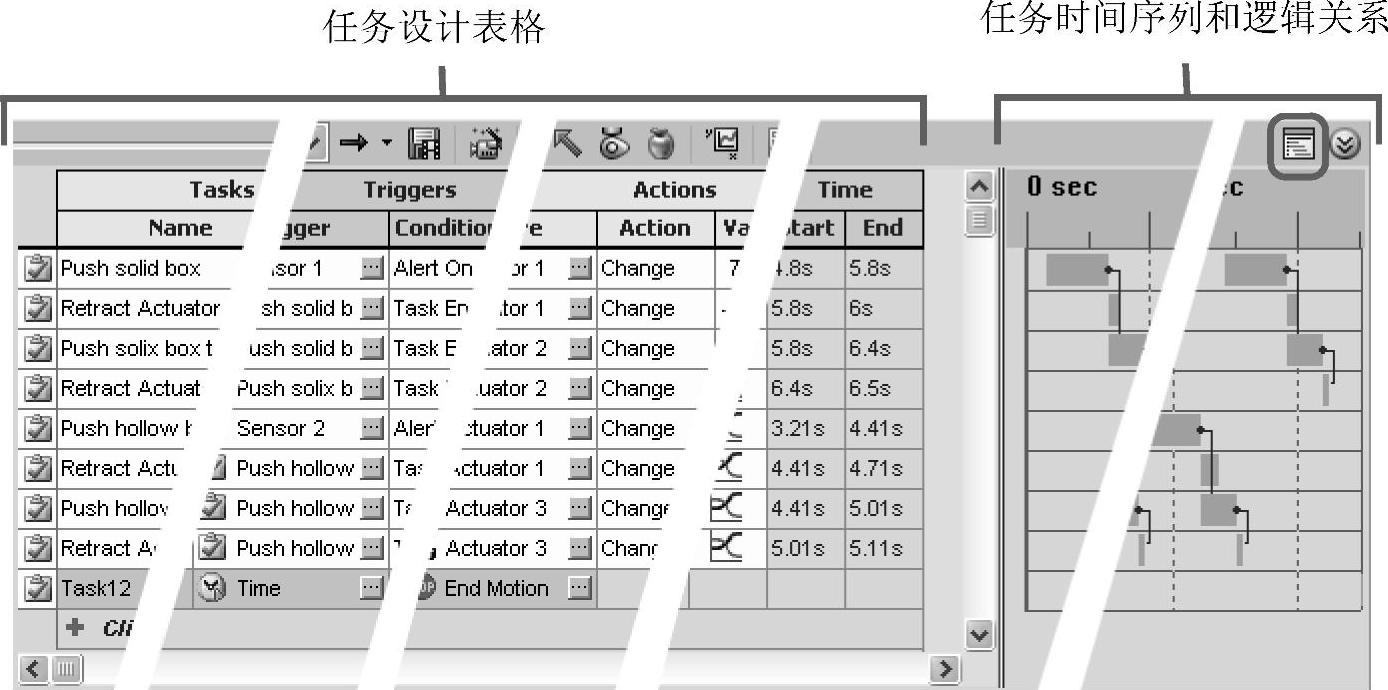
图11-7 【基于事件的运动视图】
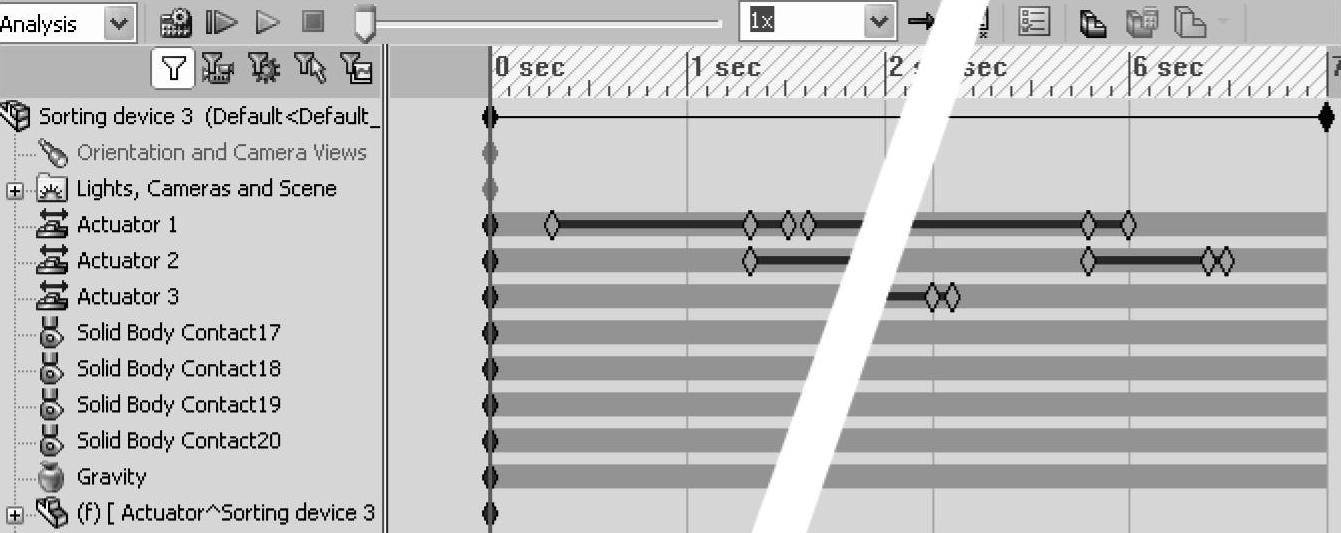
图11-8 时间帧序列

步骤10 基于事件的运动视图
切换到【基于事件的运动视图】。
步骤11 任务1——名称及触发器
这个系统的第一个任务就是沿着支架平台移动最底部的盒子到指定位置,在此位置可以确保Actuator2可能被推至Bay1。当底部的实体盒子激发了接近传感器Sensor1时将触发该任务。因为这个传感器在实体盒子位于平台上方2mm时触发了一个事件,为了保证Actuator2有充足的时间缩回,应对该任务指定0.1s的时间延缓。
单击【单击此处添加】以添加一条新的任务行。在【名称】栏输入Pushsolidbox,如图11-9所示。在【触发器】域中单击按钮 ,打开【触发器】对话框,如图11-10所示。选择“Sensor1”,单击【确定】,关闭【触发器】对话窗口。回到【基于事件的运动视图】,通过设置【条件】为“提醒”,设置【时间/延缓】为“0.1s延缓”,完成对【触发器】部分的设置。
,打开【触发器】对话框,如图11-10所示。选择“Sensor1”,单击【确定】,关闭【触发器】对话窗口。回到【基于事件的运动视图】,通过设置【条件】为“提醒”,设置【时间/延缓】为“0.1s延缓”,完成对【触发器】部分的设置。
步骤12 任务1——操作
接下来需要指定操作来完成对任务1的定义。在这个实例中,本操作是将实体盒子沿着平台推动75mm的马达Actuator1,这个距离对Actuator2的后续操作而言是一个理想的位置。
在【特征】栏中,选取Motors下的【Actuator1】,在【操作】列表中选择“更改”,并在【数值】处输入“75mm”,在【持续时间】处输入“1s”,并在【轮廓】处选择“谐波”,如图11-11所示。
步骤13 任务2——缩回Actuator1
定义第二个任务——缩回Actuator1。这个任务应该在任务1后触发,推动实体盒子,完成操作,持续时间为0.2s。

图11-9 添加任务

图11-10 触发器

图11-11 定义任务(一)(https://www.xing528.com)
将此任务命名为“Retract Actuator1”,如图11-12所示。

图11-12 定义任务(二)
步骤14 任务3——推动实体盒子至Bay1
定义第三个任务:由Actuator2推动实体盒子至Bay1。这个任务包含将Actuator2伸出50mm,持续时间为0.6s。和任务2(Retract Actuator1)类似,任务3将在任务1完成时触发,推动实体盒子移动。将此任务命名为“Push solid box to Bay1”,如图11-13所示。

图11-13 定义任务(三)
步骤15 任务4——缩回Actuator2
和步骤13类似,定义任务4——缩回Actuator2,持续时间为0.1s。这个任务将在任务(Push solid box to Bay1)完成时触发。将此任务命名为“Retract Actuator2”,如图11-14所示。
步骤16 对带孔盒子的任务
遵循步骤11至15,定义类似的任务来移动带孔盒子至Bay2中。为了将带孔盒子移至Actuator3附近,需将Actuator1伸长130mm,持续时间为1.2s且延缓时间为0.1s。然后在0.3s内缩回Actuator1。

图11-14 定义任务(四)
对Actuator3使用相同的时间和距离数值,就和在步骤14和15中用于Actuator2的数值一样。和步骤11至15一样,类似地给定新的任务名称,如图11-15所示。

图11-15 定义其他任务
步骤17 仿真属性
设置【每秒帧数】为“200”,选择【使用精确接触】。在【高级选项】下,设置【最大积分器步长大小】为“0.05s”。
提示
为了加速仿真,而且我们并不关心力的结果,最大积分器步长的值可以不作严格要求。
步骤18 计算7s内的仿真
完成本次仿真将耗时大约15min。
步骤19 动画
动画显示系统最终的运动。
步骤20 时间线视图
切换到【时间线视图】,用户可以看到基于事件的仿真结果,如图11-16所示。这个仿真结果可以帮助设计人员考虑是否要改变驱动器的速度来优化系统,更改材料来改变摩擦效果,更改设计以更好地在容器中堆叠盒子,以及其他类似的操作。
步骤21 保存并关闭文件

图11-16 【时间线视图】
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。