



这一部分,将由学员自己求解该问题的运动部分。下面只给出一个简单的引导
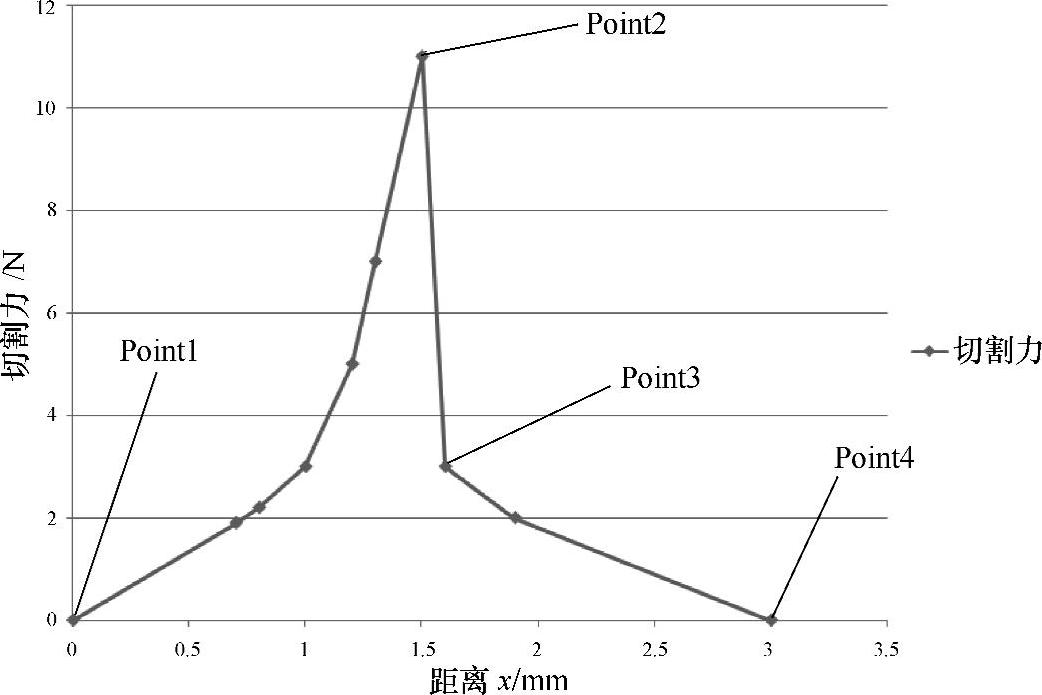
图12-3 切割力图解
提示
上面的切割力来自实验的测量值,将以刀片位置的函数(并非基于时间的函数)进行表达。没有提供基于时间的数据,是因为一般情况下这取决于切割速度,以及外科医生的手产生的输入力如何随时间变化。因为输入与时间相关的力显得太容易(已经练习了多次),而输入与位置相关的力则显得更加具有挑战性。
同时也需要注意,上面根据一定假设的与位置相关的函数可以转换为与时间相关的输入。然而,为了演示更复杂的例子(在某些分析中可能需要),这里将使用位置驱动的输入。
此处将曲线简化为图12-4所示红色的三条线段,这将足够合理地模拟切割力。
三条线段的每一条可以定义为一个线性方程式:
第一段y=7.333333x
第二段y=-80x+131
第三段y=-2.14286x+6.42857
基本步骤
● 添加配合:添加合适的配合,确保机构按照预期动作。
● 确定切割力:切割导尿管时作用在刀片上的作用力或反作用力由实验确定,而且这并不是线性的。以实验数据为基础编写一个表达式来模拟作用在刀片上的力。
● 运行运动分析:运行这个算例并生成适当的图解。
● 分析这个机构:执行干涉检查并检查载荷路径以确保在仿真过程中计算出正确的力。
提示(https://www.xing528.com)
用户可以查看视频“Surgical_she-ar.avi”来帮助理解机构的运动。
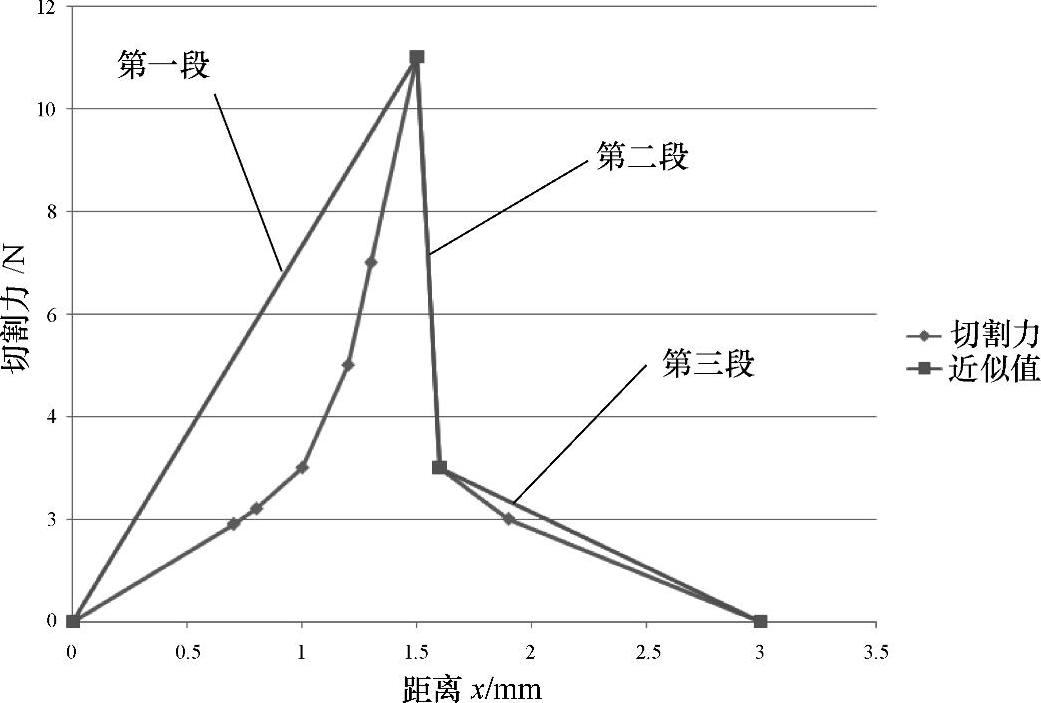
图12-4 分段函数
操作步骤
步骤1 打开装配体文件
打开文件夹“SolidWorks Motion Simulation\Lesson12\Case Study\Surgical Shear”下的文件“Surgical_shear”。当文件打开时,零部件并没有添加配合。
步骤2 配合零部件
由用户自己决定最佳方案来配合零部件,以反映出机构的机械动作,并减少冗余。请注意这个项目关注的重点是手柄。
步骤3 添加运动驱动
添加合适的马达和弹簧,以达到期望的运动(见问题描述)。
步骤4 生成基于位置的力
切割导尿管产生的作用力或反作用力不是线性的。必须编写一个基于刀片位置的力的表达式,来模拟实验确定的力。
步骤5 分析结果
生成图解并检查干涉,如图12-5所示。在必要时可以修改零件。
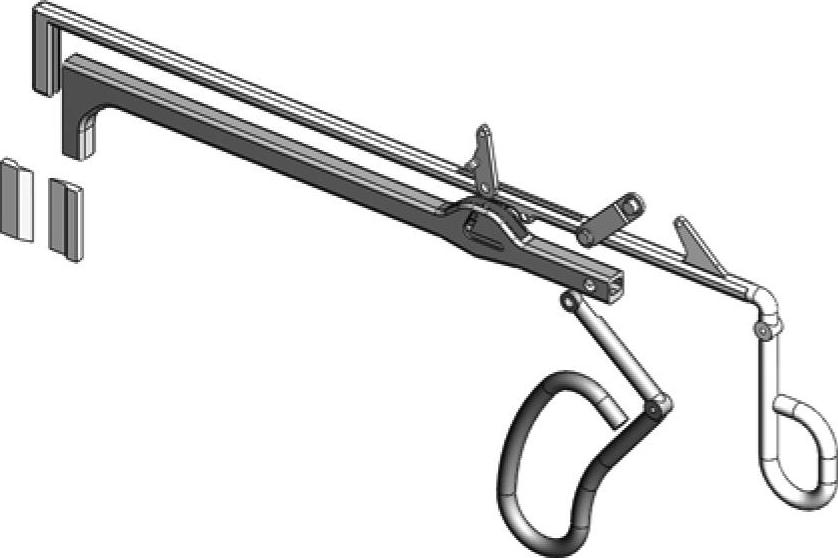
图12-5 检查干涉
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。