



1.PLC控制实验系统网络结构
以西门子S7300PLC控制器为核心的实验控制系统网络结构图如图8-69所示。该系统主要包括:PLC控制器部分、具有上位机监控操作功能的学生终端部分、过程实验装置、具有实验信息管理功能的教师终端设备。
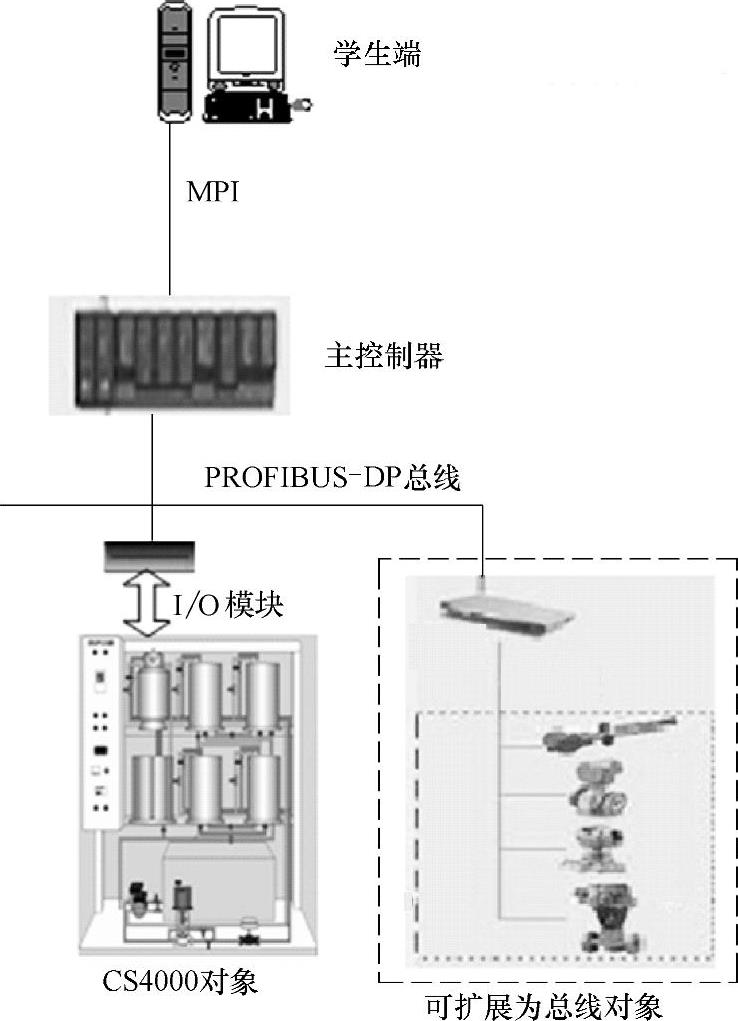
图8-69 基于PLC实验控制系统结构图
2.实验装置
实验装置中主要包含:不锈钢储水箱、串接圆筒有机玻璃左上水箱、左下水箱、右上水箱、右下水箱、四容水箱、单相2.5kW电加热锅炉(由不锈钢锅炉内胆加温筒和封闭式外循环不锈钢冷却锅炉夹套组成)、纯滞后水箱等实验装置。系统动力支路分两路组成:一路由单相动力循环水泵、电动控制阀、电磁流量计、水管及手动切换阀组成;另一路由动力水泵、变频调速器、涡轮流量计、水管及手动切换阀组成。
实验装置中检测变送和执行元件包括:压力液位传感器、温度传感器、涡轮流量计、电磁流量计、控制阀等。实验装置整体结构如图8-70所示。
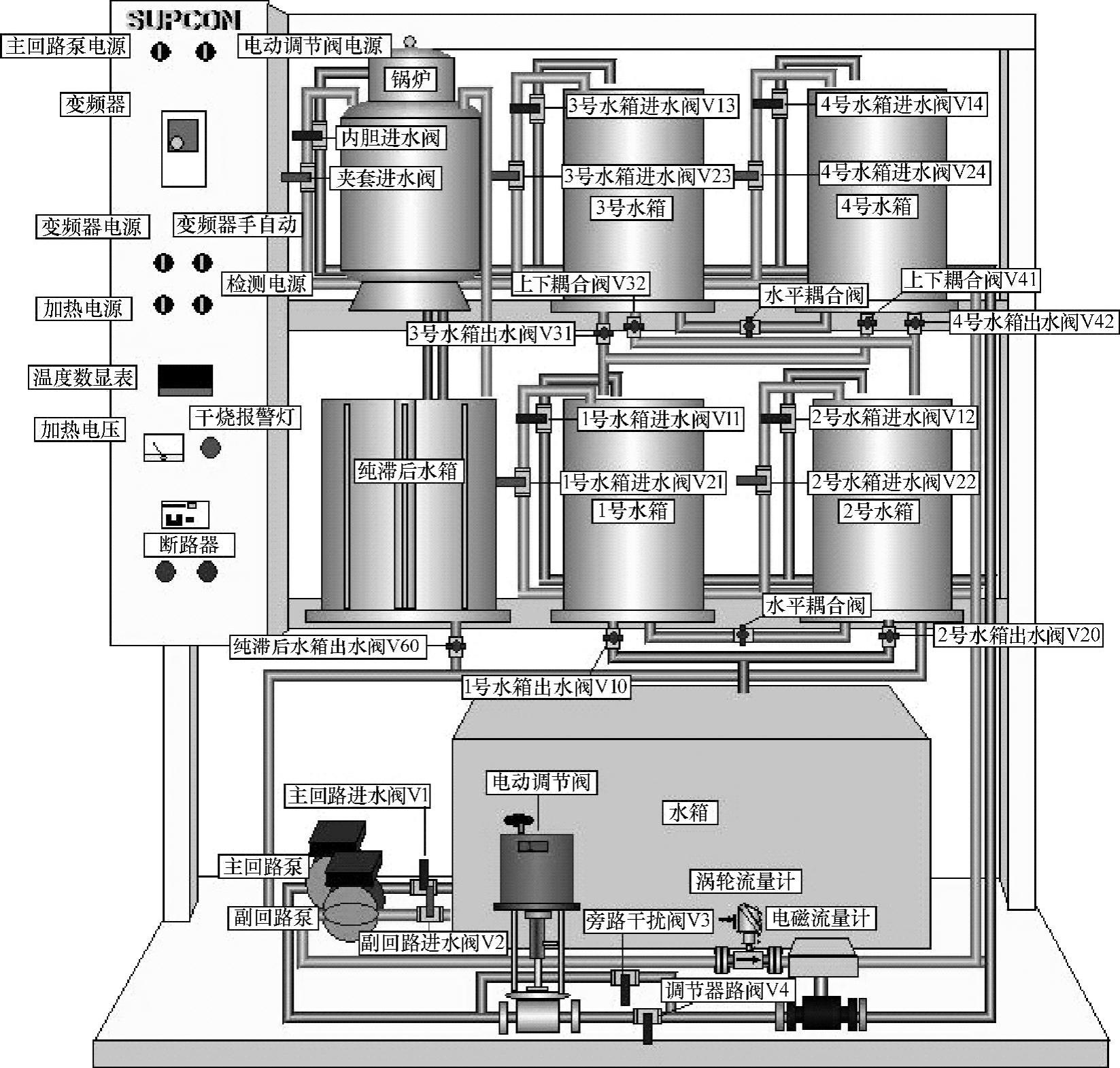
图8-70 实验装置整体结构
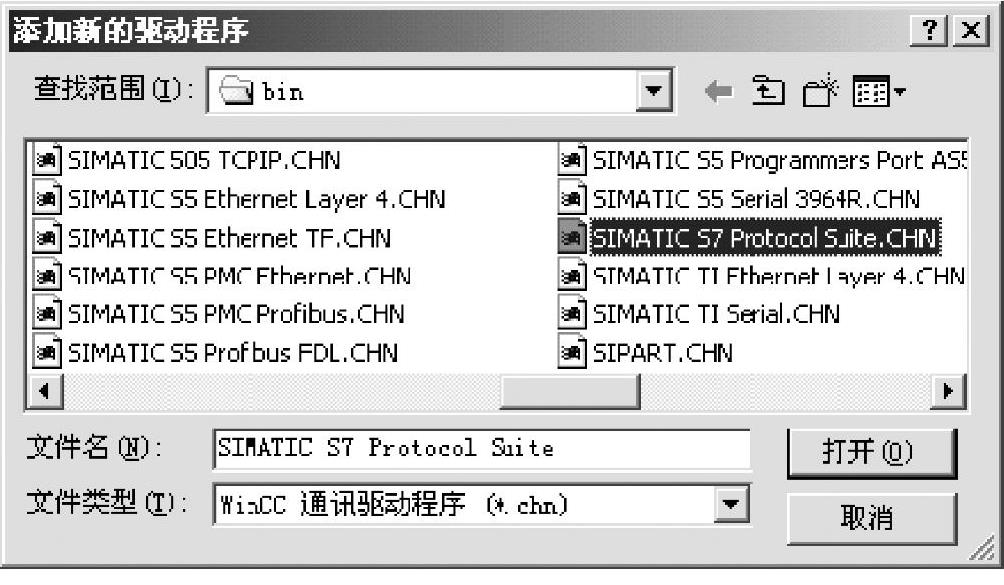
图8-71 添加驱动程序
3.运行WinCC实验项目
运行WinCC,新建一个工程,进入工程资源管理器。在“变量管理器”中添加SIMATIC S7 PROTOCOL SUITE驱动程序,如图8-71所示。
在相应的通信接口类型中新建驱动连接。在新建的驱动连接中建立变量。注意:变量的地址要和PLC中的地址相对应,如图8-72所示。
在图形编辑器中创建组态画面。画面中用到的变量一定要事先定义好。
保存并激活WinCC。运行工程,实现在上位机对控制对象的监控。也可以点击 图标,进入监控运行系统。
图标,进入监控运行系统。
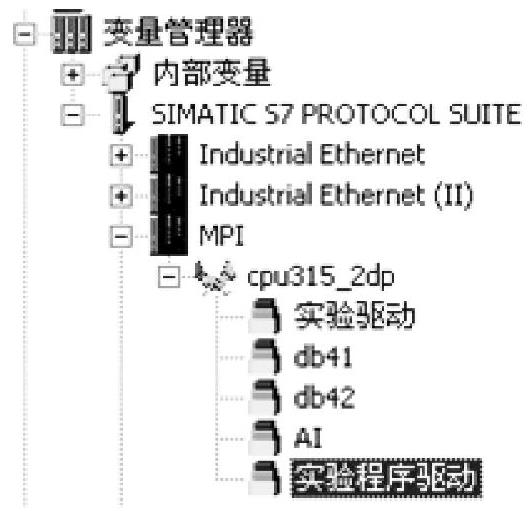
图8-72 新建驱动链接
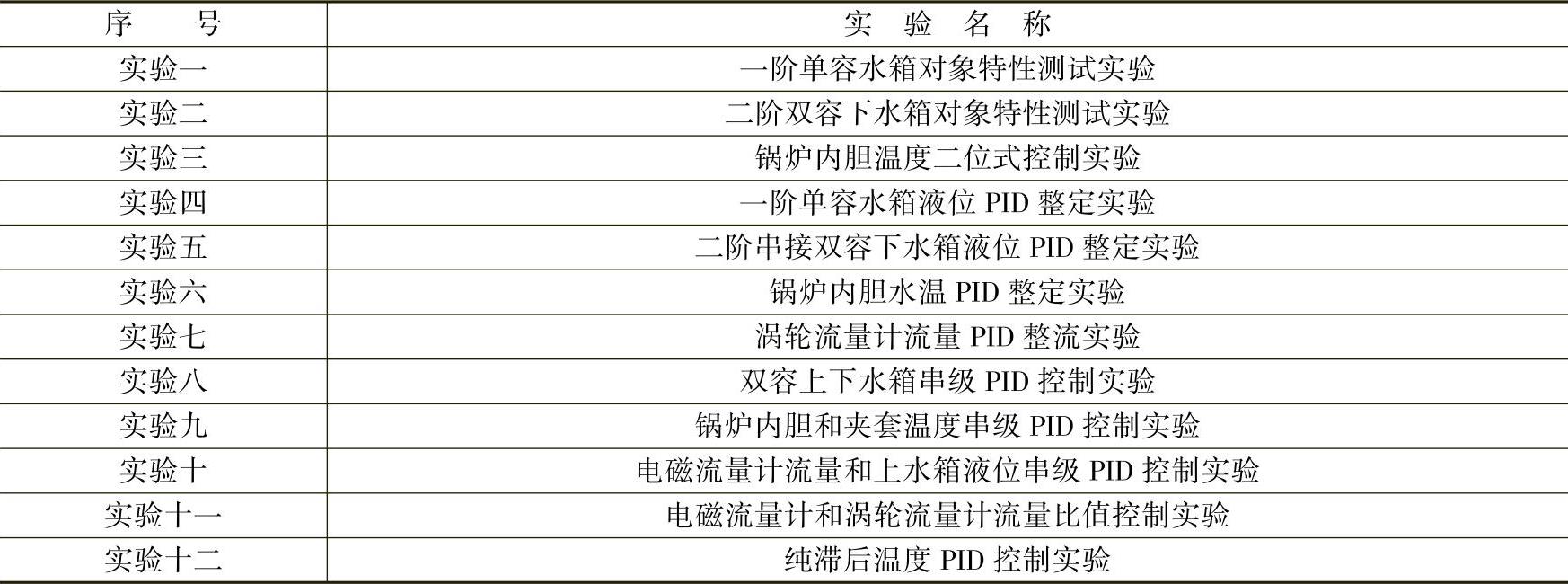
根据已经组好的文件进行操作,点击菜单可进入实验控制系统,并对里面的一些开放参数进行设置。WinCC可运行的监控实验见表8-17。
表8-17 WinCC可运行的监控实验
4.锅炉内胆和夹套温度串级PID控制实验
图8-73所示为一温度串级控制系统。主对象的输出为系统的被控制量(锅炉夹套温度),副对象的输出是锅炉内胆温度。
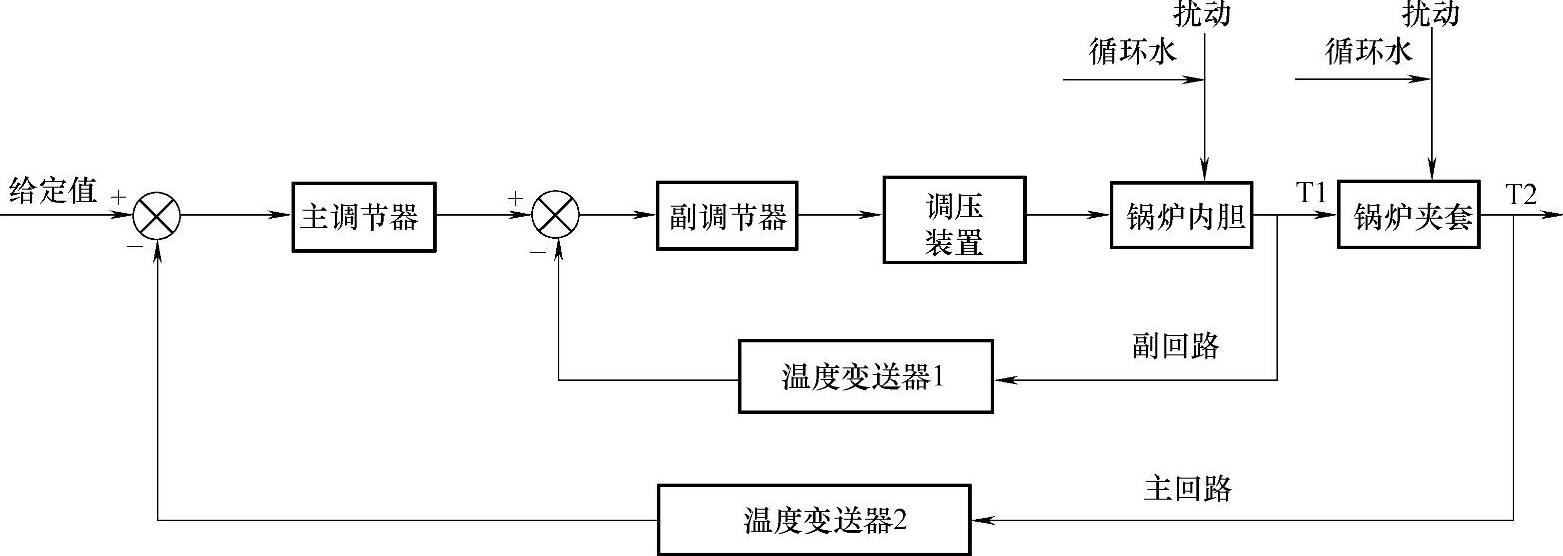
图8-73 温度串级控制系统
实验步骤:(https://www.xing528.com)
(1)设备的连接和检查
打开以主回路泵为动力的支路至锅炉内胆的所有阀门(V1,V4,V15)。
打开以副回路泵为动力的支路至锅炉夹套的所有阀门。
控制台上将“加热水箱水温”信号(1~5V)连接到PLC的模拟输入模块1的AI2端口,将PLC的模拟量输出模块的AO1通道连接到“加热功率”端子上,连接时要注意正负极性。夹套温度已经直接接入PLC模拟输入模块1的AI7,不必再连线。
(2)启动实验装置
打开电源带漏电保护断路器。
电源指示灯点亮,即可开启电源。
将锅炉内胆的泄水阀开至适当开度,打开主回路泵电源和旁路干扰阀V3向锅炉内胆进水,直到干烧报警灯熄灭为止。
控制锅炉内胆进水阀V15的开度,使锅炉内胆溢流管能流出一定量的水,确保内胆始终满水。注意内胆泄水阀开度和溢流水量不宜过大,防止冷却作用过强。
打开变频器电源,并将变频器手自动切换开关打到手动。然后按“PU/EXT”按钮使“PU”灯亮,此时变频器工作在内部操作模式。转动白色旋钮选择一个频率后,按“SET”键确定。
控制夹套进水阀至适当开度,使夹套溢流出一定量的水,注意溢流的量不要太大。
打开检测电源和电加热管电源。
开启控制台上24V/S7-300PLC电源开关,将PLC置于运行。
(3)实验操作步骤
运行WinCC软件,进入相应的实验。
正确设置PID控制器:
副控制器:纯比例(P)控制,正作用,自动,KC2(副回路的开环增益)较大。
主控制器:比例积分(PI)控制,反作用,自动,KC1<KC2(KC1主回路开环增益)。
待系统稳定后,类同于单回路控制系统那样,对系统加扰动信号,扰动的大小与单回路时相同。
通过反复对副控制器和主控制器参数的调整,使系统具有较满意的动态响应和较高的控制精度。
(4)思考题
串级控制系统投运前需要做好哪些准备工作?主、副控制器的内、外给定如何确定?正、反作用如何设置?
本实验中主、副控制器的极性应如何确定?
为什么副回路中的副控制器不设计为PI控制器?
改变副控制器比例放大倍数的大小,对串级控制系统的扰动能力有什么影响?试从理论上给予说明。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。