



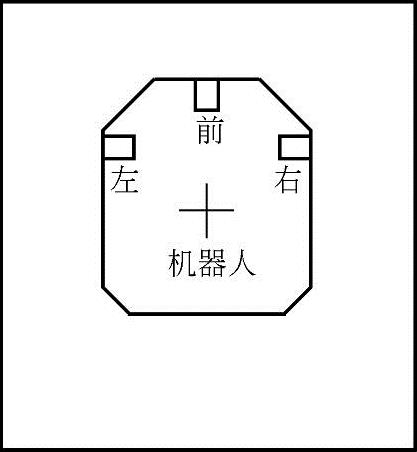
图6-8 在迷宫中的竞赛机器人
竞赛机器人有了记忆功能,才能表现出智能。
1.迷宫的状况
设在迷宫中的竞赛机器人如图6-8所示,竞赛机器人具有三个方向的传感器:前方传感器F、左方传感器L、右方传感器R。如果前方有隔栅,则传感器来的信号为“1”,无隔栅则为“0”。竞赛机器人在迷宫中运动时,三个传感器F、L、R会传来迷宫的8种状况,即111、110、101、100、011、010、001、000,如图6-9所示。即死胡同111、右转弯110、左转弯101、直丁字路口100、直路011、右丁字路口010、左丁字路口001、十字路口000。
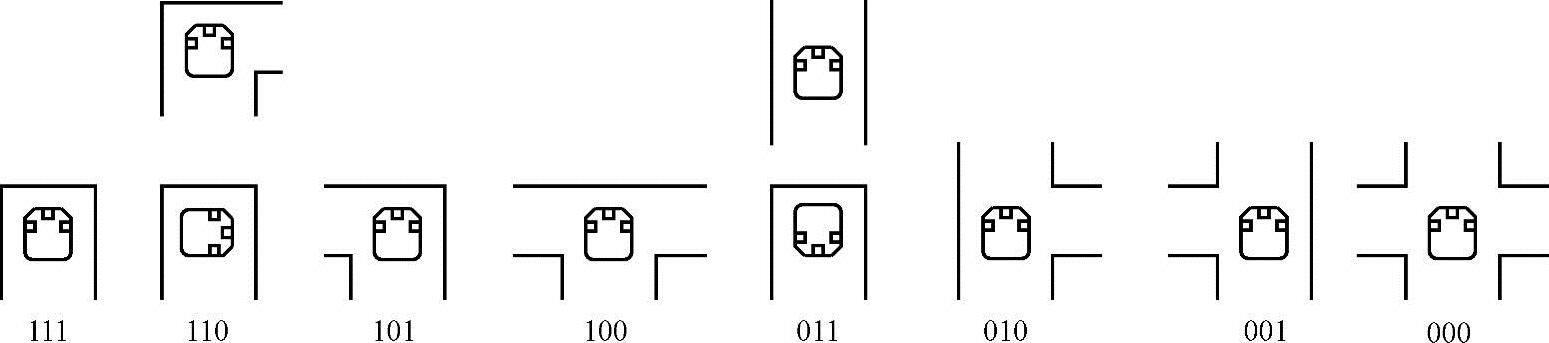
图6-9 迷宫的8种状况
2.记忆迷宫的状态寄存器
设可位操作的路况寄存器road_flag用来记忆迷宫的路况,每遇到变化的分叉的路况,置road_flag.0=1或0,且左移一位,把路况保存起来。“1”表示可前进,“0”表示可右转(对于十字路口,右转优先),如图6-10所示。
设死胡同寄存器dead_flag用来记忆遇到的死胡同。每遇到一个死胡同,置dead_flag.0=1,且左移一位。
设转向寄存器turn_flag用来记忆竞赛机器人的向左转或向右转的操作状态,如图6-11所示。
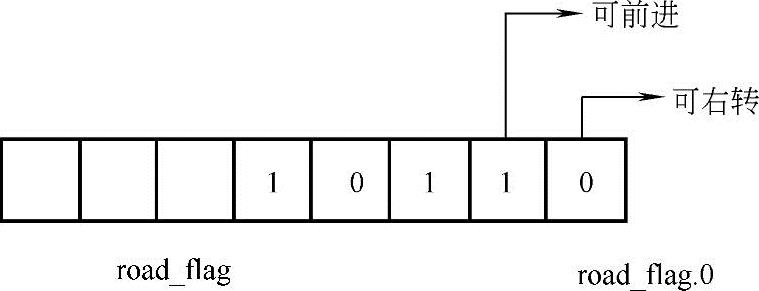
图6-10 可位操作的路况寄存器road_flag
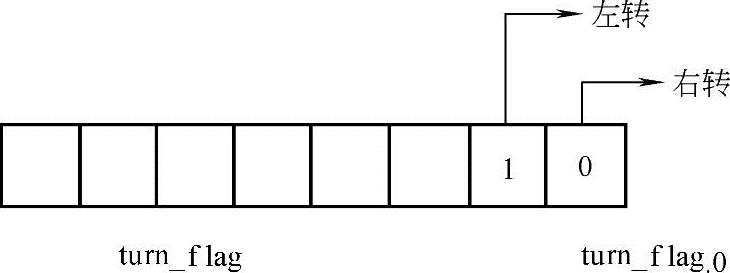
图6-11 转向寄存器turn_flag
3.迷宫问题的分析
一般的迷宫有上面的8种状况,当竞赛机器人遇到这8种状况时,做出正确的选择才能走出迷宫。下面具体来研究竞赛机器人遇到这8种状况时应采取的措施。
(1)死胡同111状况 当竞赛机器人遇到死胡同111状况时,应采取的处理方法是:原地180°调头,同时置死胡同标志,如图6-12所示,由state_111()函数实现。
(2)右转弯110状况 当竞赛机器人遇到右转弯110状况时,应采取的处理方法是:原地右转90°前进,如图6-13所示,由state_110()函数实现。
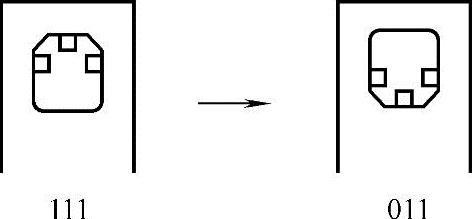
图6-12 死胡同111状况
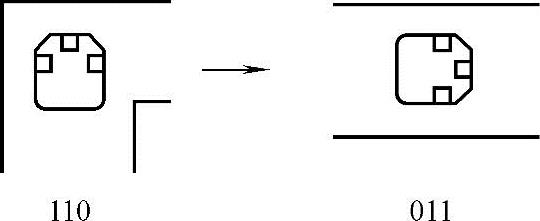
图6-13 右转弯110状况
(3)左转弯101状况 当竞赛机器人遇到左转弯101状况时,应采取的处理方法是:原地左转90°前进,如图6-14所示,由state_101()函数实现。(https://www.xing528.com)
(4)直路011状态 当竞赛机器人处于直路011状态时,应采取的处理方法是:继续保持前进,由state_011()函数实现。
(5)十字路口000状态 当竞赛机器人遇到十字路口000状态时,应采取的处理方法是:向右转90°前进,如图6-15所示,由state_000()函数实现。
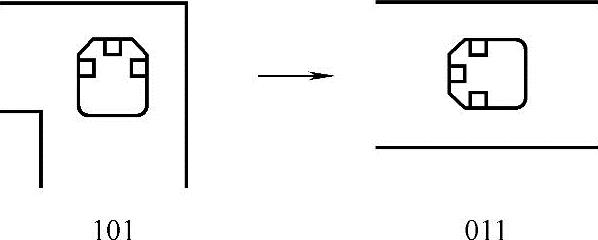
图6-14 左转弯101状况
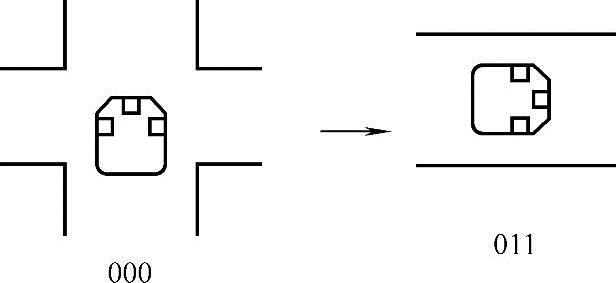
图6-15 十字路口000状况
(6)直丁字路口100状态 当竞赛机器人遇到直丁字路口100状态时,如图6-16所示。应采取的处理方法的程序框图如图6-17所示,由state_100()函数实现。
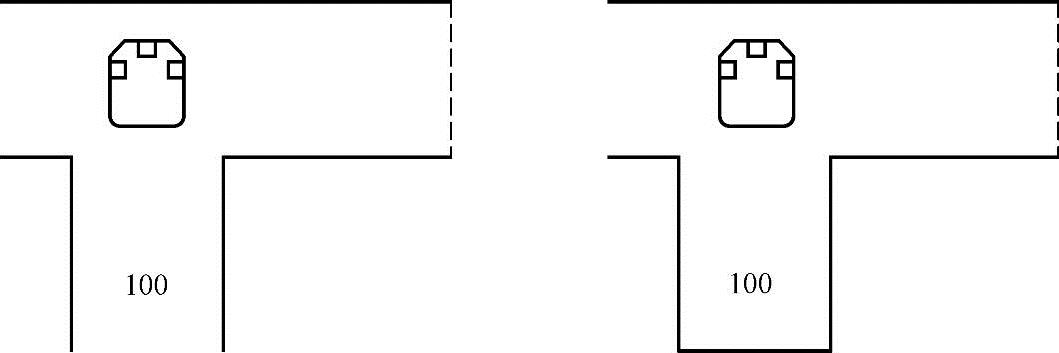
图6-16 遇到直丁字路口100状况
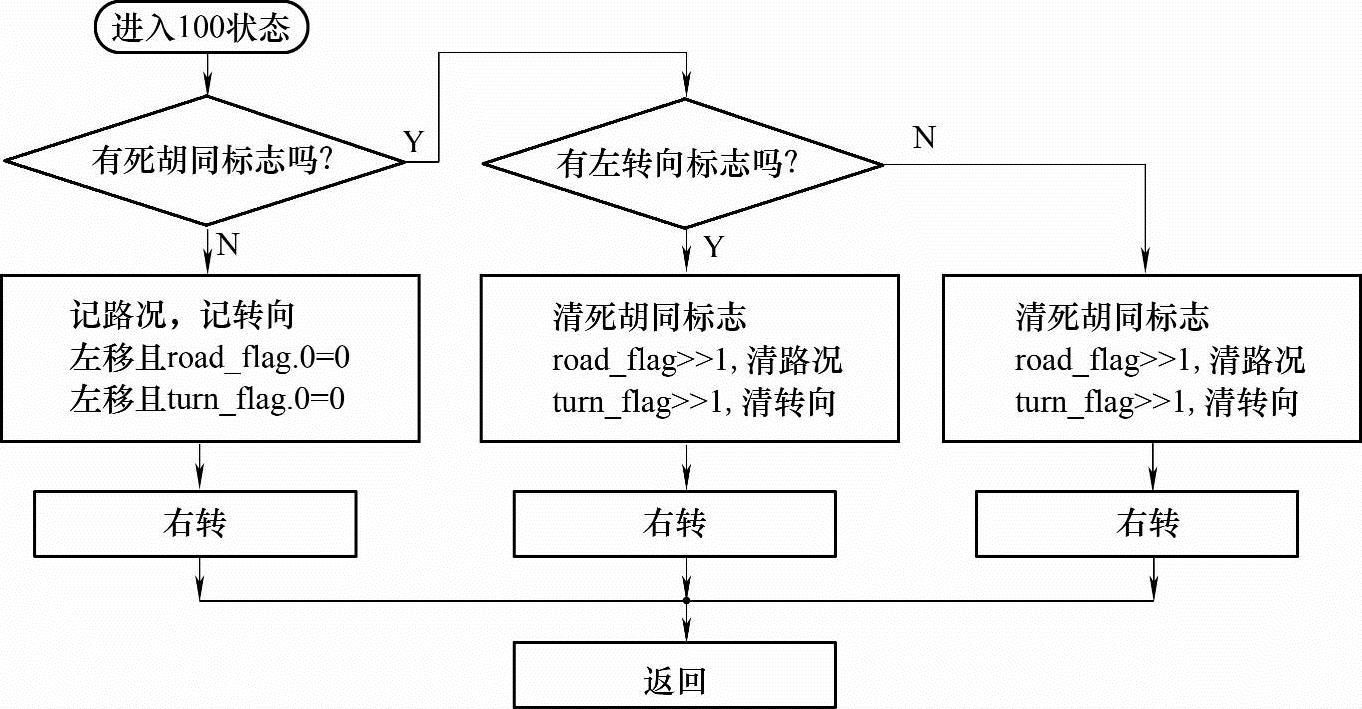
图6-17 遇到直丁字路口100状况时的程序框图
(7)右丁字路口010状态 当竞赛机器人遇到右丁字路口010状态时,如图6-18所示。应采取的处理方法的程序框图如图6-19所示,由state_010()函数实现。
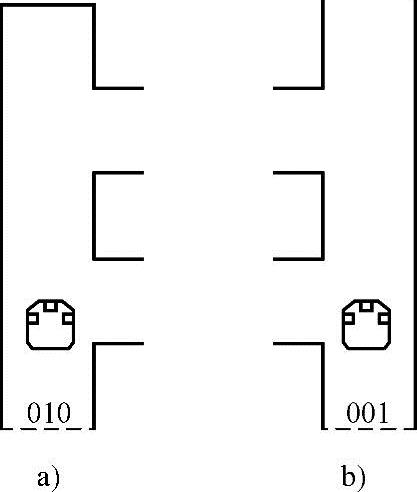
图6-18 丁字路口状况
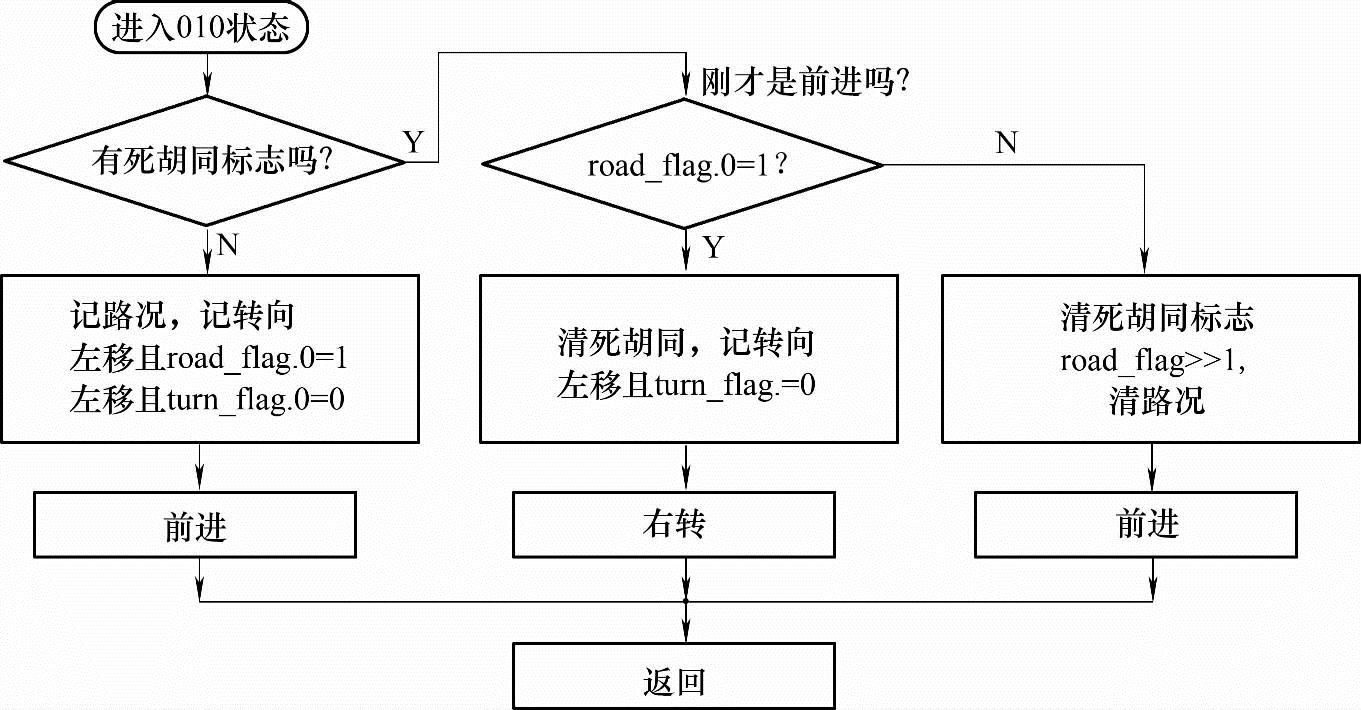
图6-19 遇到右丁字路口010状况时的程序框图
(8)左丁字路口001状态 当竞赛机器人遇到左丁字路口001状态时,如图6-18b所示。应采取的处理方法的程序框图如图6-20所示,由state_001()函数实现。
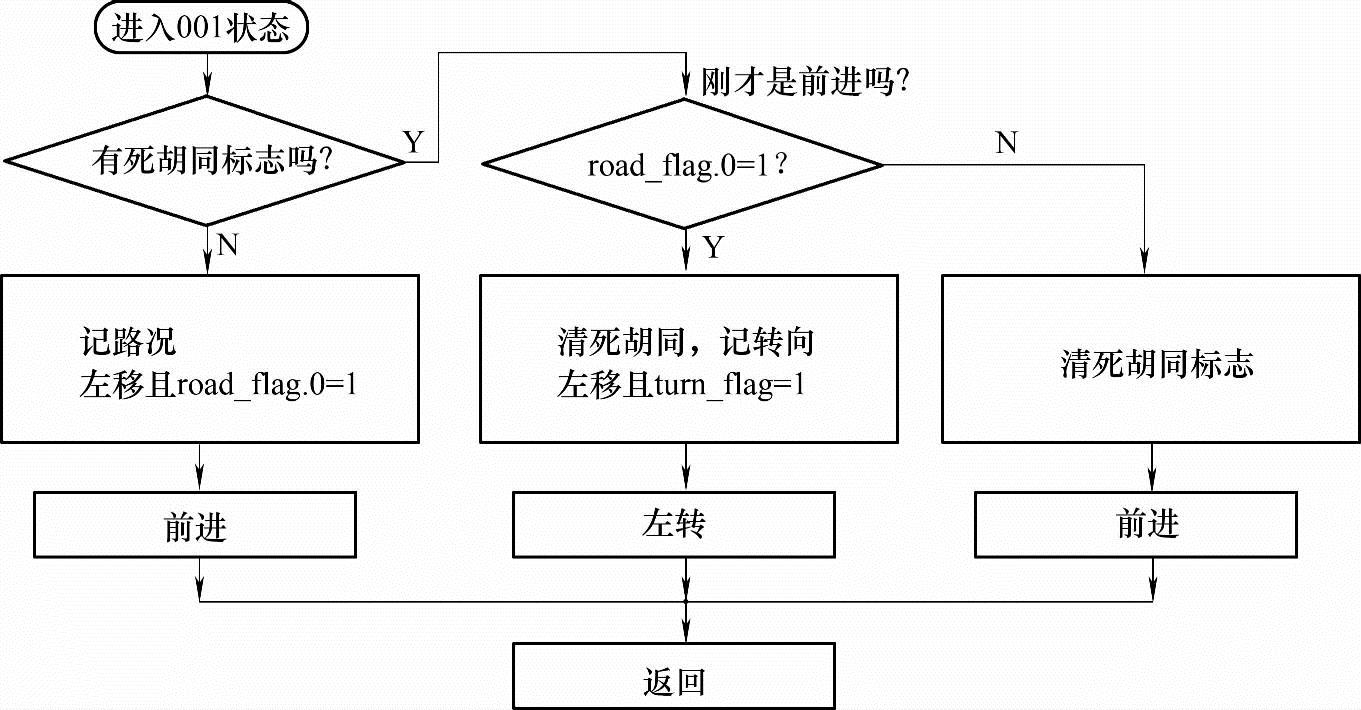
图6-20 遇到左丁字路口001状况时的程序框图
4.迷宫问题的解决
竞赛机器人在遇到每种分叉口状况时,记忆路况,转向。当遇到死胡同时返回,当返回时遇到刚才的分叉口时,根据上次的转向,决定当前的运动,或前进或左转或右转。其程序框图如图6-21所示。
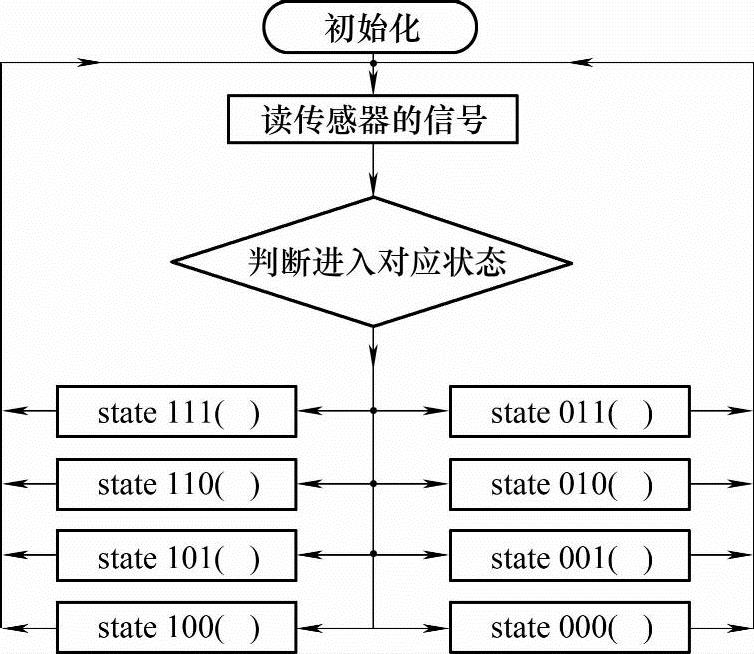
图6-21 具有记忆功能的迷宫程序框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。