



在工程实际中,应用最为广泛的调节器控制规则就是比例(Proportion)、积分(Inte-gral)、微分(Derivative)控制,简称PID控制。PID控制器问世至今已有70余年,它以结构简单、稳定性好、工作可靠、调整方便而成为工业控制主要技术之一。PID控制技术主要应用于系统控制器结构和参数不能通过理论计算,必须依靠经验和现场调试来确定的情况。即当不完全了解一个系统的控制过程和被控对象的有效参数时,适用PID控制技术。PID控制实际中也分PI控制和PD控制。PID控制器就是利用比例、积分、微分三种控制来尽量减小被控对象产生的系统误,以及加强系统稳定性与抗干扰能力。图7-1所示为PID控制系统原理图。
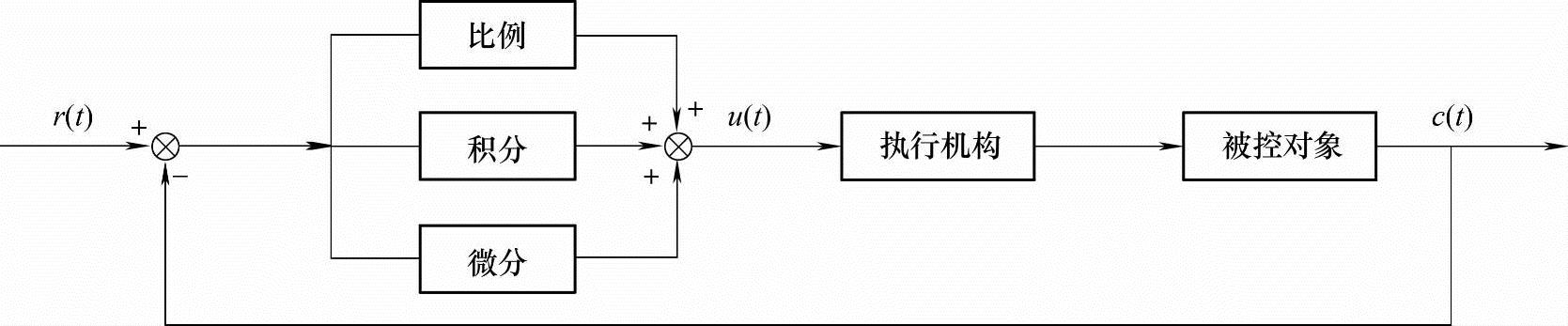
图7-1 PID控制系统原理图
下面将各种常用控制规律的控制特点进行简单的总结。
(1)比例控制规律(P)。采用比例控制规律能较快地克服扰动的影响,比例控制的主要作用是减小偏差,比例作用越大,调节速度越快。但比例调节不能很好地稳定在一个理想的数值,会有余差出现。因此比例控制仅适用于控制要求不高、负荷变化不大、控制滞后对被控对象影响不大,或者被控参数允许在一定范围内有余差的场合。(https://www.xing528.com)
(2)比例积分控制规律(PI)。在工程中,比例积分控制规律是应用最广泛的一种控制规律。积分项是对控制时间的积分,随着时间的增加,积分项也会随之增大,从而推动控制器的输出增大,使稳态误差进一步减小,直到等于零。积分项的引入可以帮助比例控制消除系统余差。
(3)比例微分控制规律(PD)。微分调节具有预见性,系统可以预见偏差的变化趋势并产生超前控制作用,在偏差形成之前将其消除。对于具有滞后的控制通道,引入适当的微分调节参与控制,可以有效减少系统超调量与调节时间,对于提高系统的动态性能指标有着显著效果。因此,对于控制通道的时间常数或时间滞后较大的场合,为了提高系统的稳定性,减小动态偏差等可选用比例微分控制规律。与此同时,微分作用也会放大外界的干扰,使得系统抗干扰能力下降,故不能施加过大的微分作用。
(4)例积分微分控制规律(PID)。PID控制规律是一种较理想的控制规律,它在比例控制的基础上引入积分,可以消除余差,再加入微分作用,又能提高系统的稳定性。它适用于控制通道时间常数或时间滞后较大、控制要求较高的场合。
竞赛机器人的结构与各个模块的工作参数往往会受到场地、灯光、环境等因素的影响,导致控制系统无法构造精准的数学模型,所以机器人的控制参数及控制器结构通常需要开发人员在现场依靠经验进行调试,因此PID控制技术的灵活应用成为机器人竞赛选手制胜的关键。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。