



采用赛道记忆算法的智能车行驶过程如图7-20所示,第一圈的主要目的就是将赛道的重要特征按特定的格式记录下来,作为第二圈的参考。初圈最终要记录的数据的横坐标一般为行驶的路程,而纵坐标则为赛道此点的曲率半径。对于横坐标,由于初圈一般匀速驶完,因此可以直接用时间来表示,也可以用车速传感器的当前脉冲数来表示。而对于纵坐标则无法第一时间取得当前点的曲率半径,它需要对采集到的原始数据进行相关处理后才能得出。在初圈中,我们能记录的只是当前的转角设定值,可用舵机占空比或直接转换过来的角度值表示。
在第二圈,由于智能车本身的某些局限性,如舵机响应时间、赛道摩擦系数、轮胎抓地力、传感器布局等因素的影响,因此对于某种特定弯道,智能车有它所谓的极限速度。如果我们利用初圈得到弯道的曲率半径后,在过各弯道时将车速调至它相应的极限速度,那么理论上这就是它所能跑出的最优成绩了。对于直道,特别是长直道,更能发挥赛道记忆算法的优势。例如,如果在初圈记忆后得到某段直道为2800个脉冲点长,那么在决策中就可在前2500个脉冲时起动电动机用最大占空比加速,超过2500脉冲时直接减速,将速度调在下一个弯道的极限速度进行过弯。由于事先已经知道直道的长度,因此调速策略更能有的放矢;对于小S弯道,可以采取高速直线过弯的策略。为了安全起见也可以采用之后过弯的策略让智能车采取较小的转角高速过弯;对于圆形弯道,需要在弯道的曲率和过弯的速度之间做一个权衡,当行驶曲率较大时,智能车可以以较大的速度行驶,当进入内圈后,由于半径减小,离心力增大,此时宜降低车速平稳通过。由于智能车保有对初圈的记忆,因此跑第二圈时可以直接得出下个弯道是左拐还是右拐。这样智能车就可以按比规定更小的曲率半径通过赛道,从而减少了经过路径,也节约了时间。同样,一般赛车在直道上高速行驶时经常会出现来回振荡的现象。如果经过初圈记忆,则赛车判断自己正处于直道时可以进行相应的措施,便能很好地解决这个问题。
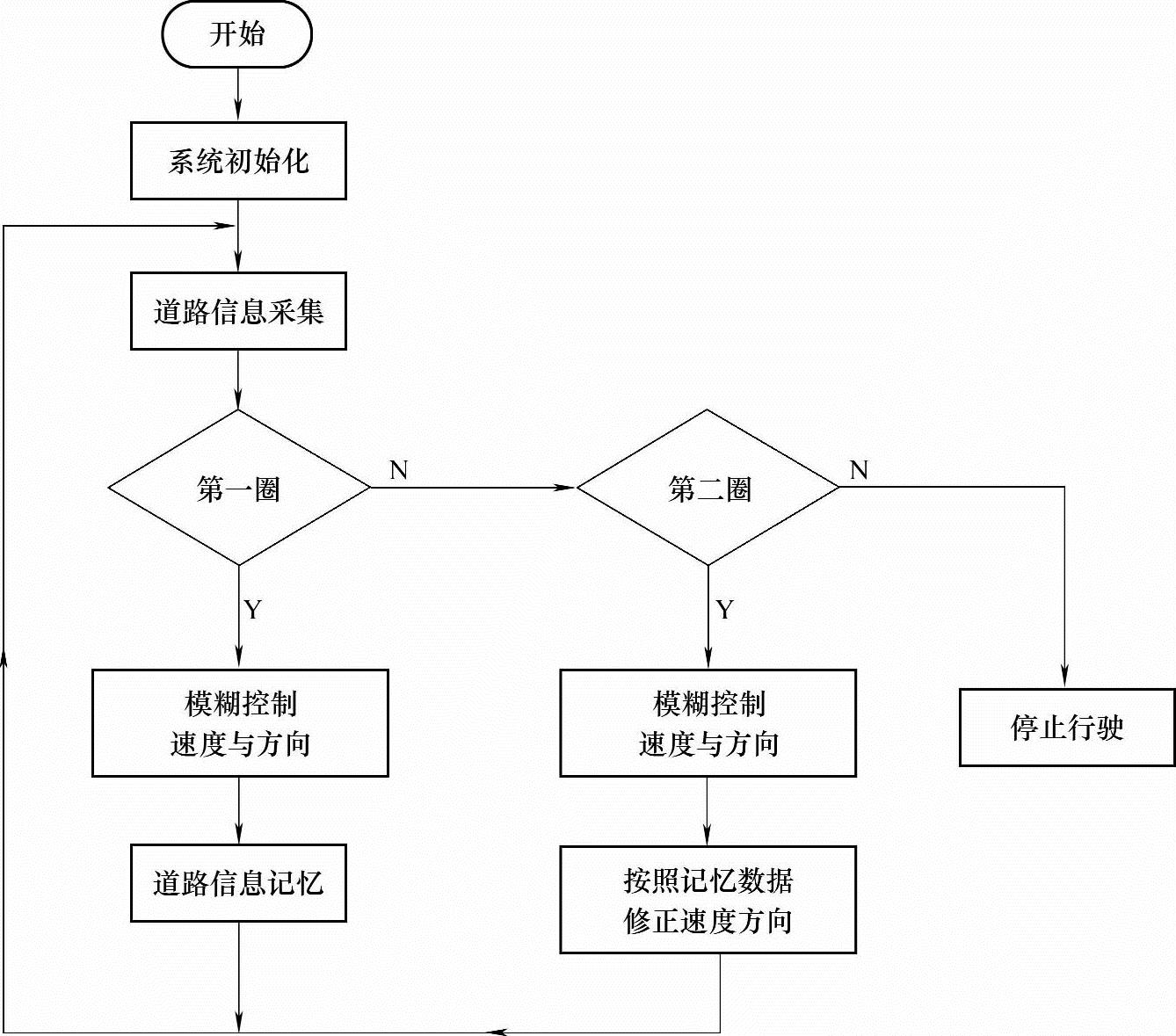
图7-20 记忆算法软件控制流程图
虽然赛道记忆算法可以大大提高赛车的成绩,但目前来讲,在实际使用过程中想取得好的成绩,还需要做更深入的研究工作。原因主要有以下两点:(https://www.xing528.com)
第一,目前大学生智能车比赛的赛道有着越来越复杂、越来越长的趋势,十字交叉线也将不只出现一个,这对初圈记忆和数据处理都产生了很大的挑战;
第二,由于决赛之前赛道是不公布的,因此赛道记忆算法存在很大的风险,较保守和安全的算法在决赛中可能更有利。
虽然赛道记忆算法存在一定的风险,但是它独特的思路却是值得继续发展下去的,有着很大的发展潜力。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。