



图1.6.8所示为一般的定位机构。为了实现高精度,需要各种各样元件技术的高精度化和善于把它们有机地、良好地组合起来。该目标的实现必须具备下述四个条件:
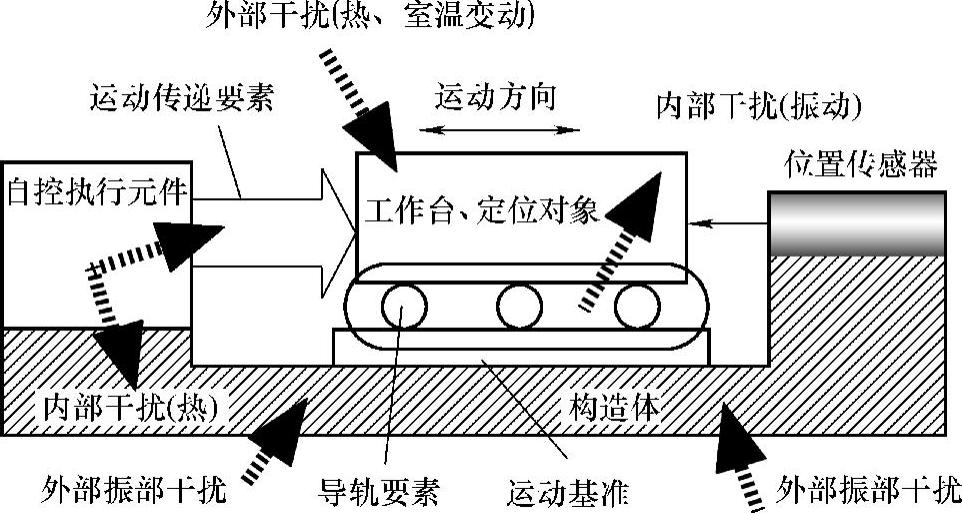
图1.6.8 一般的定位机构
(1)高精度的运动基准 一般机械运动的运动基准(数据),其几何学上的形状是根据母性原理来确定,虽然这个运动基准可以由导轨元件来组成,但是根据母性原理,不可能得到超过这个基准形状精度的运动精度。当用传感器来测量和补偿修正运动误差时,这个机械系统,例如钢直尺,就会成为测量对象的数据资料,必须把高度的形状精度作为基准。
(2)沿运动基准运动的机构 即使拥有正确的运动基准,还必须要有符合基准要求的合适机构。虽然运动基准可以是单纯的几何学意义上的形体,但是实际的机构并不是理想的刚体,其运动精度受到内力和外力的影响,受到零件的弹性塑性变形和摩擦的影响,尤其是在高速驱动机构时,机构的内部失调增大,如果构成机构的元器件配置不恰当,那么即使是微小的运动基准的形状误差,也有可能被组成机构的元器件放大。(https://www.xing528.com)
(3)正确检测运动的传感器系统 即使拥有正确的运动基准和机构,也必须要有能够正确检测运动的传感器系统。如今几乎所有的位置定位机构都会将运动件的变位信号反馈到控制系统里,形成闭环控制,以测定和修正运动体的定位目标精度。从原理上来说,传感器的性能(精度与反应特性)会对定位精度产生极大影响。完成测量运动体的定位运动误差和修正此误差的任务后,定位装置中的传感器系统设计就很关键了。
(4)消除不利的内外干扰因素 由于存在来自机械内部的负载力量、振动和热等干扰,这种不利干扰还经常来自机械所处的外部环境,内外干扰严重影响精密机械的运动,并且使传感器系统的测量精度降低,因此必须设计精密机械的抗内外干扰构造,尽量减少内外干扰的发生,以及采用能够抵抗干扰的机械结构和元器件。
在实际的工作中,完全消除和抵抗内外干扰是非常困难的。然而,我们必须尽可能去接近抗干扰的完美目标,可采用下述的若干具体方法。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。