



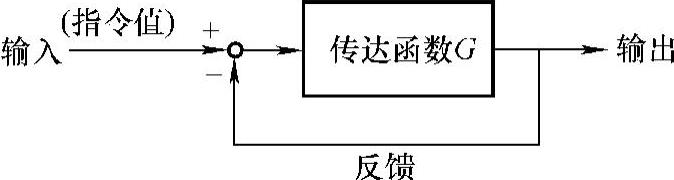
反馈控制法不论是在重复误差辅正还是非重复误差辅正方面都得到了广泛的运用。反馈控制是控制理论(古典控制理论)的中心,在理论上是发展已十分成熟的领域,是易于利用的技术。基本的反馈控制如图2.11.7所示,输出信号回到输入的指令,把输入的误差消除为零后再输出的反馈控制。
在使用反馈控制时,为了实现高精度,从机械的哪个地方取得信息而作为反馈为好呢?请试考虑一下数控机械的例子。在数控机床里控制直线运动的形式如图2.11.8所示。
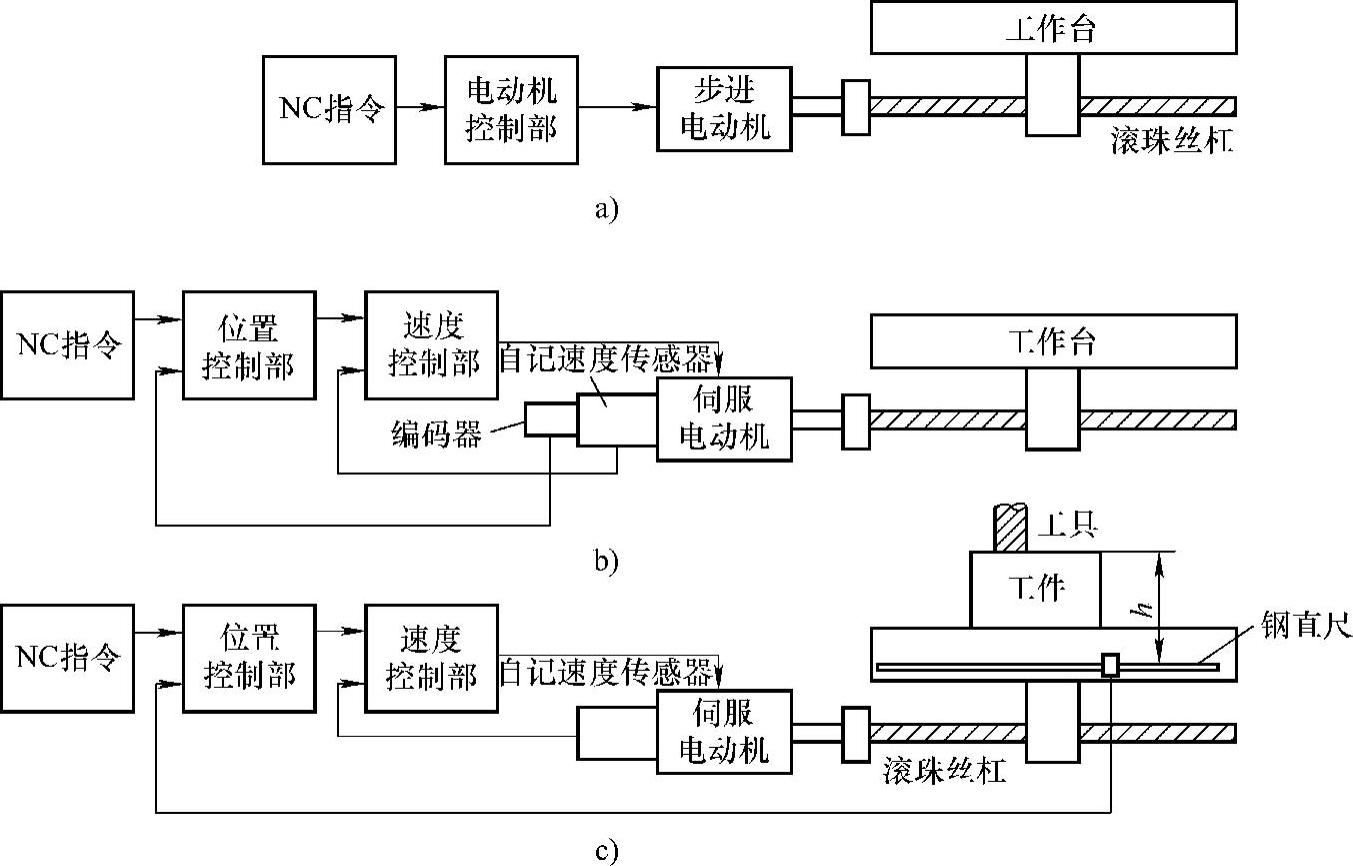
图2.11.8 数控机床直线运动的形式
a)开环方式 b)半闭环方式 c)闭环方式(https://www.xing528.com)
图2.11.8a所示的开环方式是最简单的方式。步进电动机对于每一个指令脉冲已经决定了旋转的角度。但是,这个方式不能保证从电动机开始到工作位置是否按图示动作。因为没有反馈,也就没有指令值,没有为得到目的的输出而必须保持的驱动力,因此无法对精度有所期待。
图2.11.8b所示的半闭环方式中,从电动机后部取出反馈信号,因此按照指令值电动机一定驱动到旋转结束,但是这个方式中电动机的确按照指令值运动,而作为目标的工作台位置是否移动则没有保证。即存在滚珠丝杠的误差和工作台驱动系统的变形。
在图2.11.8c所示的闭环方式中将工作台的位置检出加以反馈,工作台做一定运动到达目标位置,得到高的运动精度,但是这也是不完全的。因为从阿贝原理可以理解,如图2.11.8c所示以距离工作台一定高度的位置来看,位于钢直尺高度的位置决定精度和目标点的位置决定精度未必一致。此时,因为零件没有办法装在钢直尺上,必须用非接触的方法将这个位置检出并进行反馈。这时一般使用激光干涉计。由上述得到下面的系:
【系2】反馈信号必须尽量从欲加以控制的位置或从其近旁检出。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。