



【摘要】:线性定常离散系统状态空间描述包括状态方程和输出方程。状态方程是一阶差分方程组,输出方程是一组代数方程。离散系统状态空间模型的框图如图1-4-1所示。对式两边进行Z变换,在零初始条件下容易得到图1-4-1 离散状态空间模型的框图与连续状态空间模型类似,称式为离散状态空间的Z传递函数矩阵,该矩阵有p行m列。
线性定常离散系统状态空间描述包括状态方程和输出方程。状态方程是一阶差分方程组,输出方程是一组代数方程。
X(kT+T)=FX(kT)+GU(kT)
Y(kT)=CX(kT)+DU(kT) (1-4-1)
式中,T为采样周期;X为n×1维状态向量;U为m×1维输入向量;Y为p×1维输出向量。
系数矩阵A为n×n维方阵,输入矩阵G为n×m维,输出矩阵C为p×n维,直传矩阵D为p×m维。
当p=m=1时,式(1-4-1)描述单输入单输出(SISO)系统;当p,m均不为1时,式(1-4-1)描述多输入多输出(MIMO)系统。
离散系统状态空间模型的框图如图1-4-1所示。(https://www.xing528.com)
由图1-4-1求取输出Y(kT)与输入U(kT)之间的脉冲传递函数。对式(1-4-1)两边进行Z变换,在零初始条件下容易得到

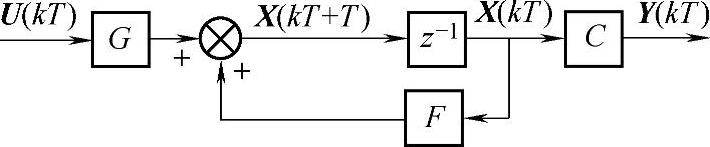
图1-4-1 离散状态空间模型的框图
与连续状态空间模型类似,称式(1-4-2)为离散状态空间的Z传递函数矩阵(或称脉冲传递函数矩阵),该矩阵有p行m列。如果将式(1-3-3)中各矩阵元的s换成z,则式(1-4-2)的Z传递函数矩阵形式及含义均可用式(1-3-3)表达,此处不再赘述。
对比连续与离散状态空间模型可知,就各系数矩阵而言,输出矩阵C和直传矩阵D是相同的,二者的状态矩阵和输入矩阵是不同的,它们具有确定的关系,将在下面介绍。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。