



主动回零被称为Active homing,对于此类型的回零,轴需完成一个指定的运动。通过配置可选择下述回零模式:
1)通过零点开关及编码器零脉冲回零(output cam and encoder zero mark);
2)仅通过外部零脉冲回零(external zero mark only);
3)仅通过编码器零脉冲回零(encoder zero marker only)。
在主动回零时,需设定回零的方向、回零的接近速度(Approach velocity)、遇到零点开关后的减速度(Reduced velocity)以及进入零坐标的速度(Entry velocity)。
1.使用零点开关及编码器的零脉冲方式的主动回零
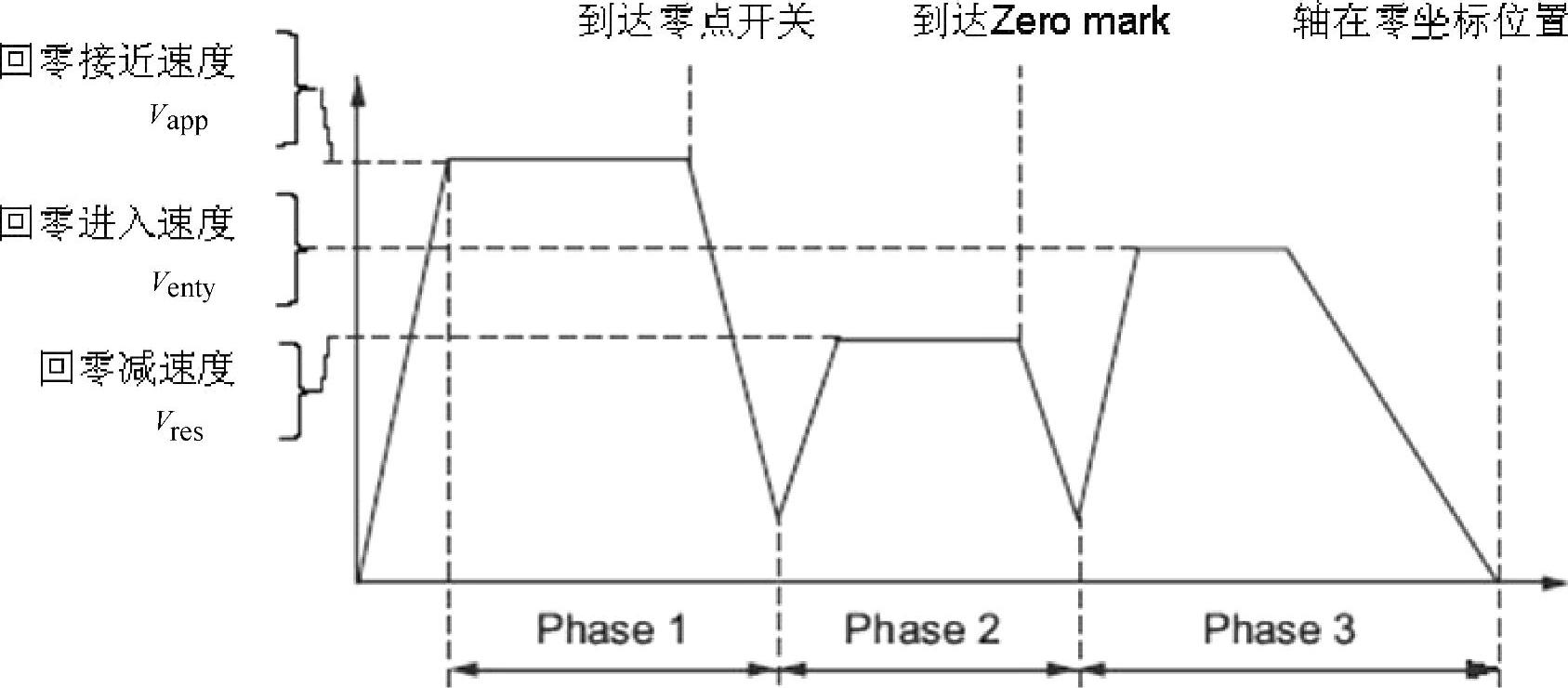
回零过程分为如下三个阶段(见图5-8):
1)轴运行至零点开关处。轴以接近速度(Approach velocity)运行,碰到零点开关。
2)与编码器零脉冲同步。轴以减速度(Reduced velocity)运行至增量编码器的零脉冲。编码器的零脉冲相对于零点开关的位置可以在图5-8中设置。控制器与第一个检测到的零脉冲同步。当检测到零脉冲时,轴被认为同步并且轴位置被设定为“Home position coordinate-Home position offset”。
3)轴运行至坐标零点位置。当检测到编码器零脉冲时,轴以进入速度(Entry velocity)运行“Home position offset”偏移距离,停止后将当前位置置为“Home position coordinate”中所设的位置,完成回零操作。
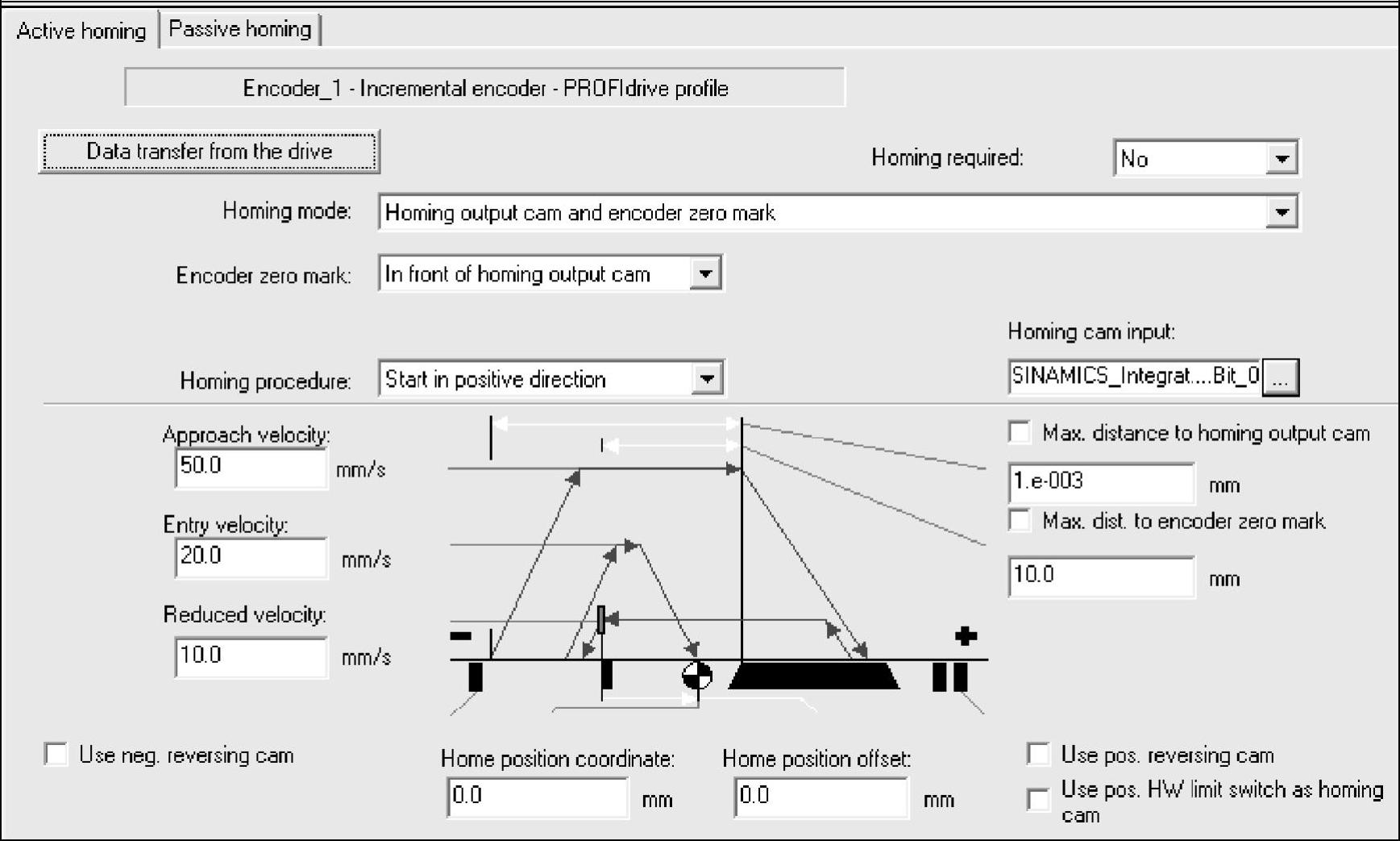
图5-8 主动回零设置
回零过程速度曲线如图5-9所示。
从SCOUT V4.1 SP1之后,硬件限位开关可以用做零点开关。轴回零运行碰到限位开关后再反向运行到第一个编码器零脉冲,轴不能在硬件限位开关的方向继续运行。左右硬件限位开关均可用做零点开关,分别用于正向回零及反向回零,在回零期间不激活硬件限位功能。图5-8中勾选“Use neg.reversing cam”即可激活该功能。
2.仅使用外部零脉冲的主动回零
回零过程中,当轴遇外部零脉冲的上升沿时,以进入速度(Entry velocity)运行“Home position offset”偏移距离,停止后将当前位置置为“Home position coordinate”中所设的位置值,完成回零操作。
外部零脉冲通过驱动器的报文传送,那么需要对驱动器的数字量输入点进行相应的配置。例如当驱动为SINAMICS S120时,检测SINAMICS上的外部零脉冲信号,轴回零正的运动方向被同步到外部零脉冲上升沿,负的运动方向被同步到下降沿,即每次在外部零脉冲的左侧。通过反向信号(设置SINAMICS参数p490),同步也可以在外部零脉冲的右侧。在SINAMICS中,编码器零脉冲或外部零脉冲的回零在参数p495中进行设置。
具体设置如下:在“Ext.zero mark signal from drive available”中选择“No”。
在轴的相关驱动中设置外部零脉冲输入,在此设置p495.0=1(将DI/DO9配置为DI9在此用做外部零脉冲)。在SINAMICS中,用做外部零脉冲的信号必须连接到CU的快速输入点上。回零设置画面如图5-10及图5-11所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图5-9 回零过程
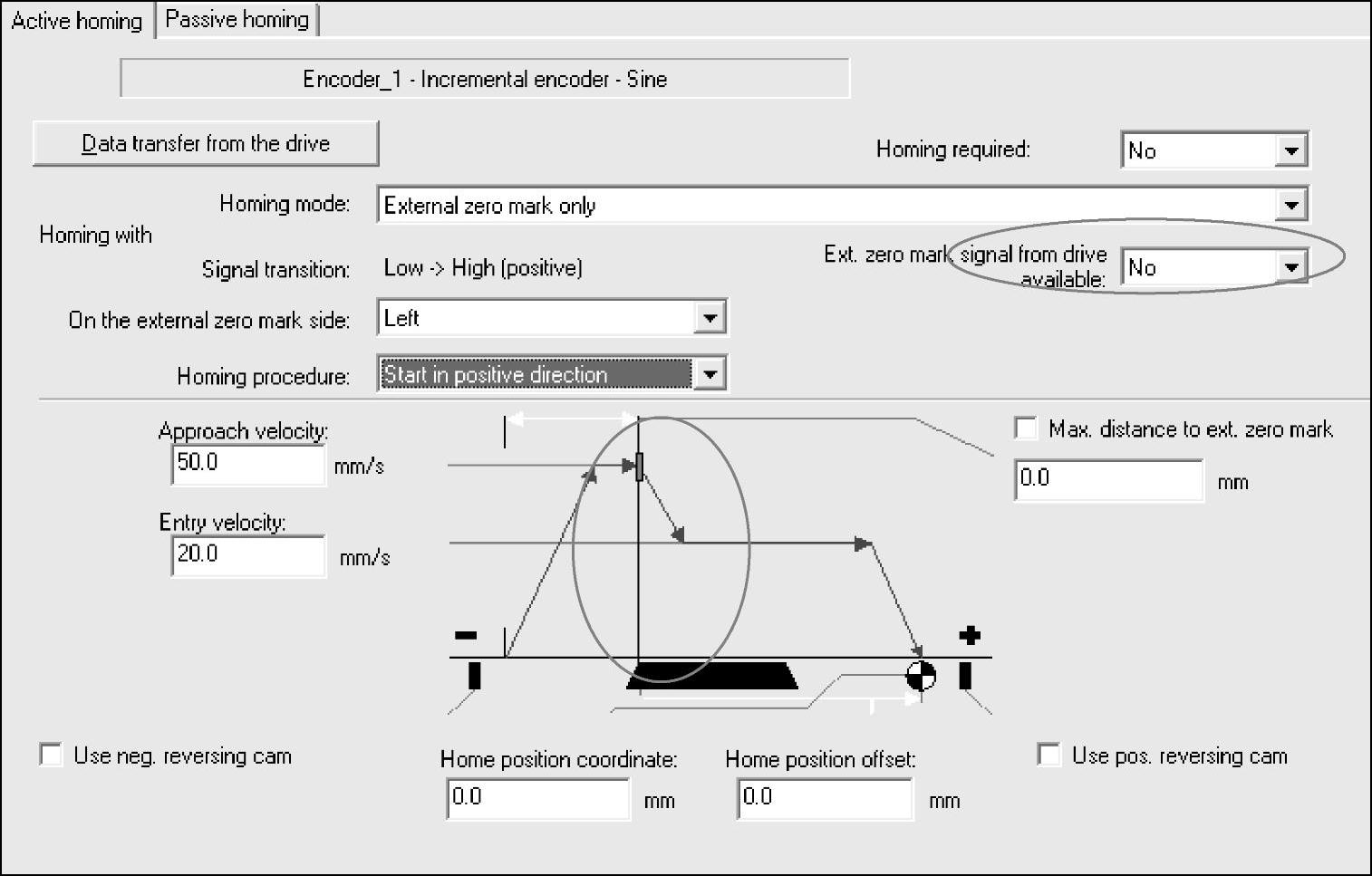
图5-10 正的运动方向外部零脉冲回零
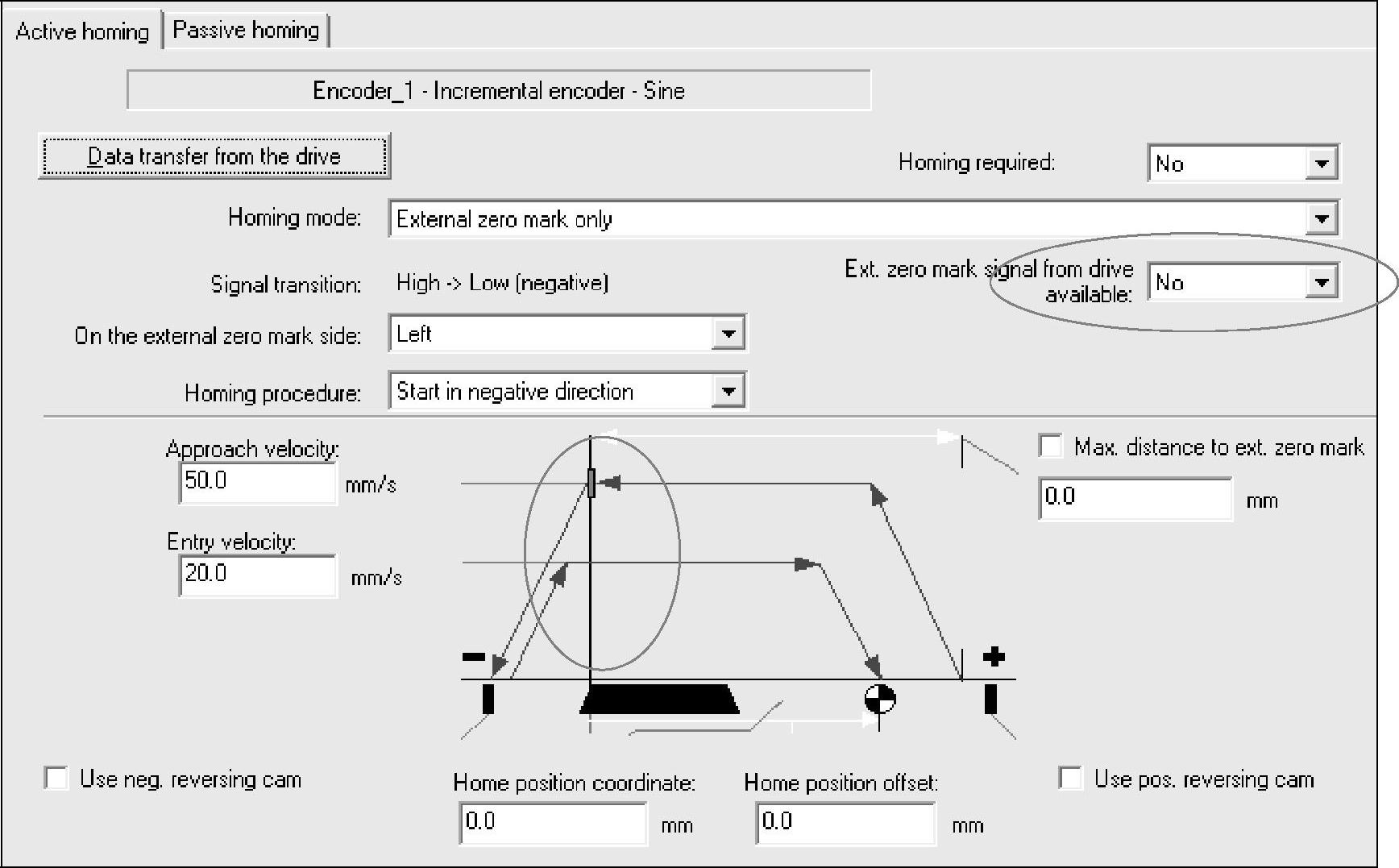
图5-11 负的运动方向外部零脉冲回零
3.仅通过编码器零脉冲的主动回零(无零点开关)
当没有零点开关时(例如轴在行程范围内编码器只有一个零脉冲信号的情况),回零命令使轴运行至编码器的零脉冲标记处,检测到编码器零脉冲后,轴以进入速度运行零点偏移位置后将此位置设置为零点坐标,如图5-12所示。
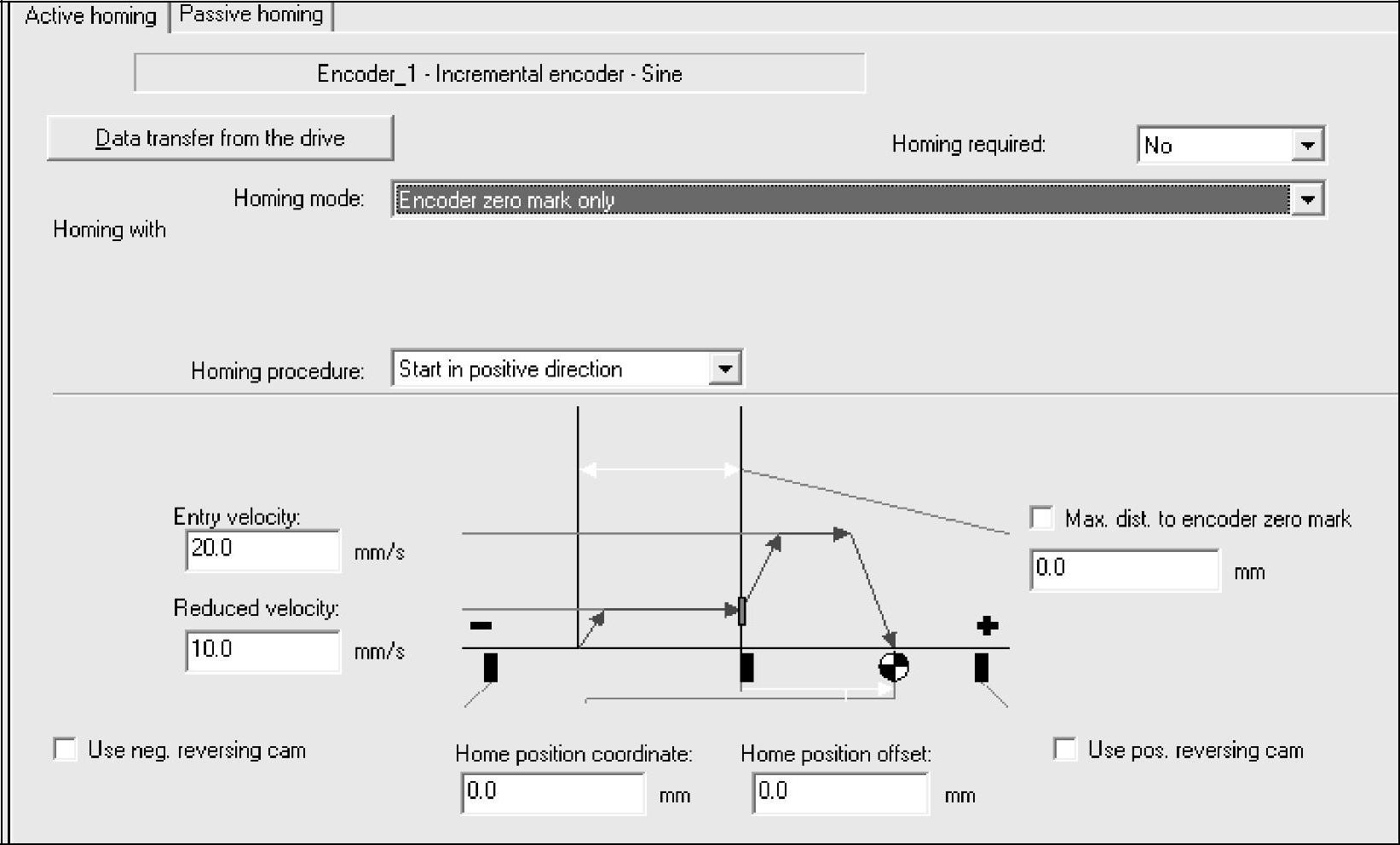
图5-12 编码器零脉冲回零设置
回零时反向开关的作用(V4.1 SP1版本之后)。仅在主动回零期间,反向开关可用于回零过程中的反向运行。反向开关可被配置为两个数字量输入信号。左、右两边的反向开关可被单独配置及激活。反向开关可在轴上定义,不能在编码器上定义,图5-13为基于开始位置点的回零顺序。
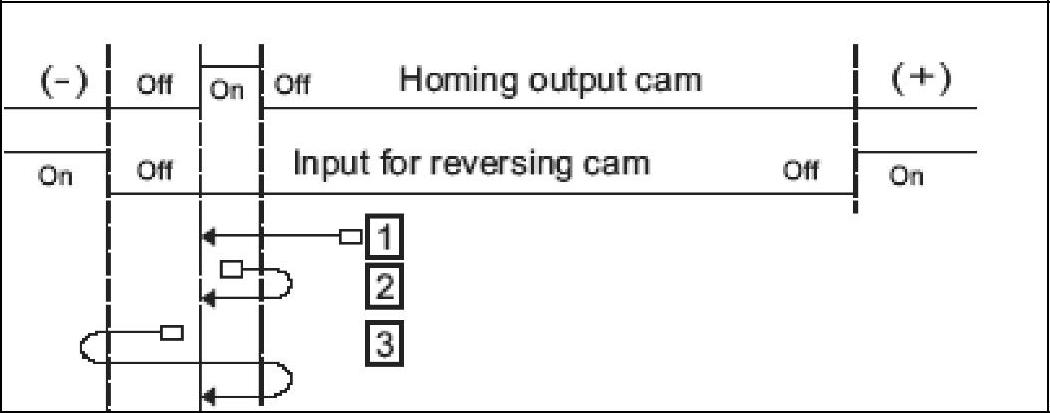
图5-13 回零反向开关作用
图5-13回零反向开关作用的示意图,轴回零前分别位于不同位置时的回零过程解释如下:
1)图标1 开始点位于零点开关的前方。
2)图标2 轴位于零点开关处。系统自动检测到此情况,轴沿回零接近的反方向运行离开零点开关,之后再按照正常的回零顺序完成回零运行。
3)图标3 轴位于零点开关的后面,即左侧。如果按照回零方向为反向的回零设置开始找零点时,当轴运行至左侧反向开关时则轴反向运行并且运行离开零点开关,之后再按照正常的回零顺序完成回零运行。可将硬件限位开关定义为反向开关。在这种情况下,在回零期间不激活硬件限位开关的限位功能。
反向开关可通过轴的配置参数“TypeOfAxis.Homing.ReverseCamPositive and TypeOfAxis.Homing.ReverseCamNegative”进行设置,也可在轴的回零画面中设置,如图5-14所示。
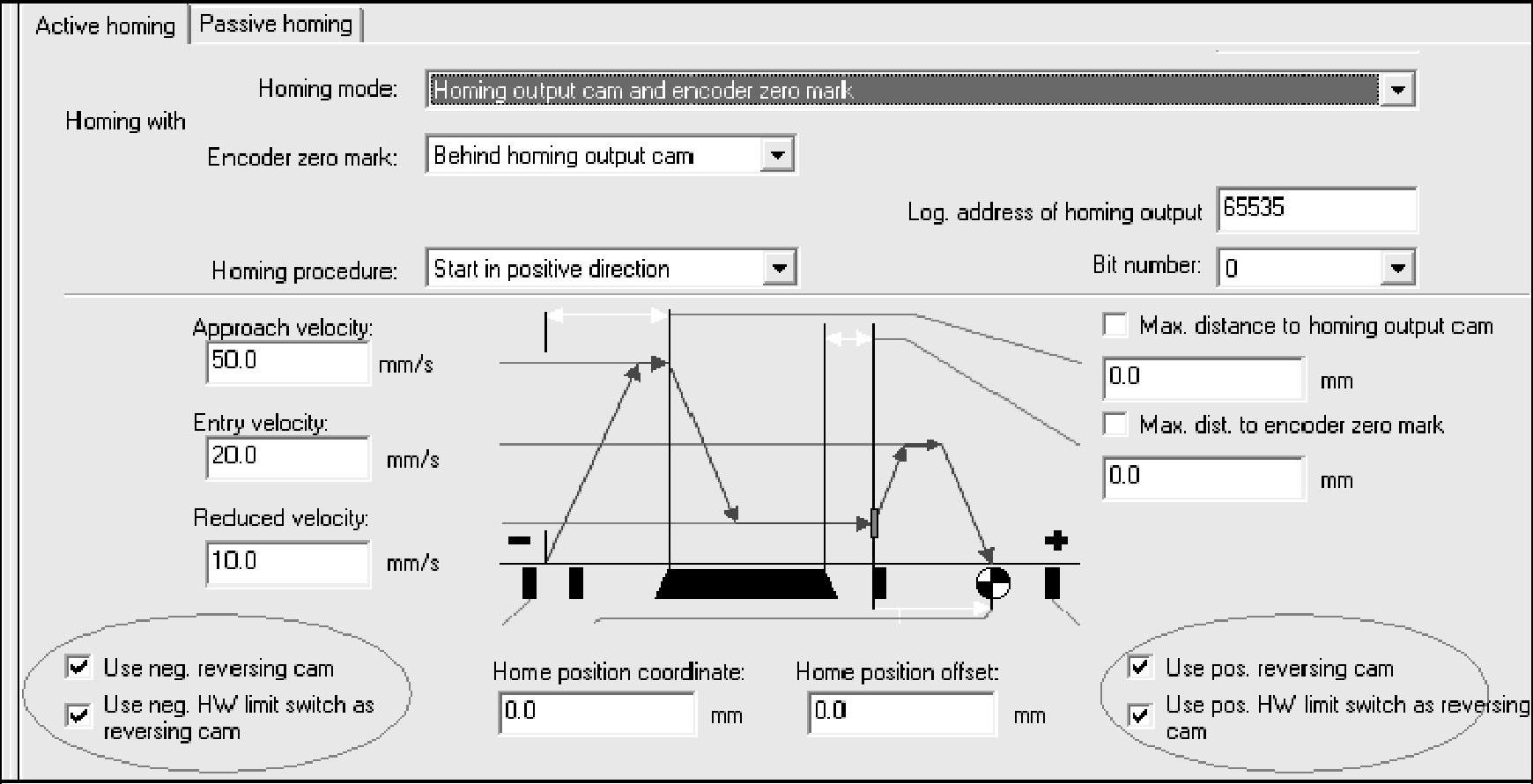
图5-14 回零反向设置
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。