



在SIMOTION中,可以使用命令库中的_enableGearing()/_enableCamming()功能来建立同步,建立同步的过程中主要受同步轮廓、同步模式、同步位置参考及同步方向等参数的影响,这些参数的取值及说明见表6-1。通过不同的参数设置,可以对建立同步的动态过程进行精确地控制。使用MCC程序中的命令Gearing On/Cam On或者使用PLCOpen中的命令_MC_GearIn/_MC_CamIn也可以建立同步,其参数意义与之类似。
1.同步轮廓参考(SyncProfileReference)
同步轮廓参考由参数SyncProfileReference确定,该参数决定同步过程是由位置还是由动态响应来决定同步过程,可设置为
(1)RELATE_SYNC_PROFILE_TO_LEADING_VALUE:由位置来决定同步过程
由位置决定同步过程就是用“同步长度(SyncLength)”来确定同步过程。同步长度指的是在建立同步的动态过程中,主值运动的长度。采用这种方式时,从轴的运动数据由系统计算得出,根据同步长度的不同,会得到不同的动态响应和位置曲线轮廓,图6-9所示为同步长度为500mm时的位置曲线。
(2)RELATE_SYNC_PROFILE_TO_TIME:由动态响应来决定同步过程
由动态响应决定同步过程时,从轴以指定的速度和加速度运行,如图6-10所示。此时位置曲线轮廓是基本固定的,但不同的动态响应数据将得到不同的同步长度。
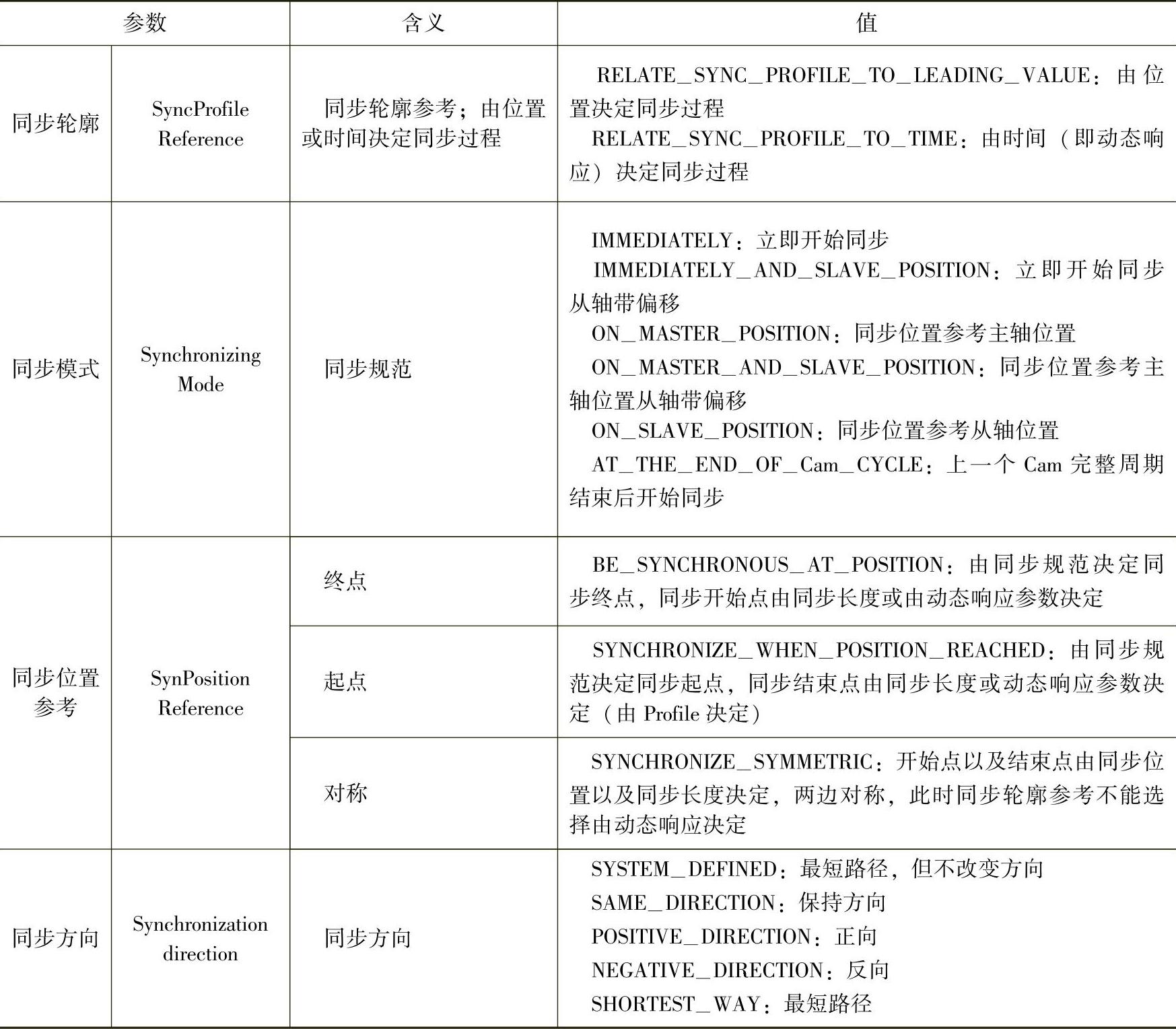
表6-1 同步参数描述
2.同步模式(SynchronizingMode)
同步模式决定了开始建立同步的时机及建立同步后从轴的偏移,有些模式下需要与同步位置参考相配合。可设置为:
(1)IMMEDIATELY:立即开始同步
表示从同步指令执行瞬间立即开始同步,此时同步位置参考不再起作用,即相当于Syn-chronizingMode决定了同步的起点,同步的终点可通过同步长度或动态响应确定。建立同步后,从轴与主值间没有偏移。
(2)IMMEDIATELY_AND_SLAVE_POSITION:立即开始同步从轴带偏移
该模式与IMMEDIATELY相同,但可以指定同步后从轴与主值之间的位置偏移。图6-11所示从轴和主值之间的偏移为30mm。
(3)ON_MASTER_POSITION:同步位置参考主轴位置
表示在主轴到达某位置后开始建立同步,需要与同步位置参考相配合,决定该位置是同步的起点、对称点或终点。图6-12所示为在主轴位置为200mm时开始建立同步,同步位置参考为起点。
(4)ON_MASTER_AND_SLAVE_POSITION:同步位置参考主轴位置从轴带偏移
该模式与ON_MASTER_POSITION相同,但可以指定同步后从轴与主值之间的位置偏移。
(5)ON_SLAVE_POSITION:同步位置参考从轴位置
该模式与ON_MASTER_POSITION类似,表示在从轴到达某位置后开始建立同步,需要与同步位置参考相配合,决定该位置是同步的起点、对称点或终点。图6-13所示为在从轴位置到达100mm时开始建立同步,同步位置参考为起点。
(6)AT_THE_END_OF_CAM_CYCLE:在上一个Cam完整周期结束后开始同步
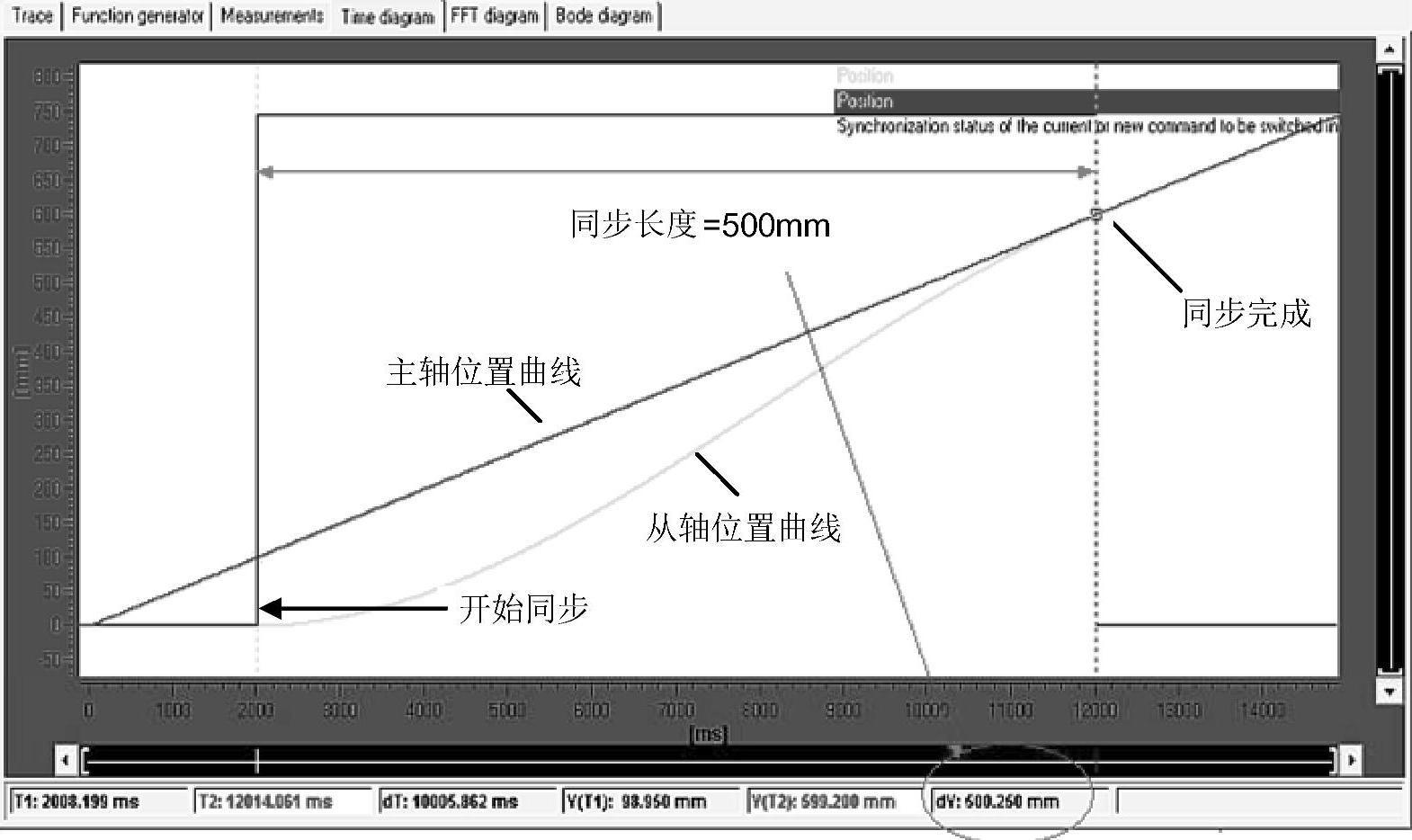
图6-9 由位置决定同步过程(https://www.xing528.com)
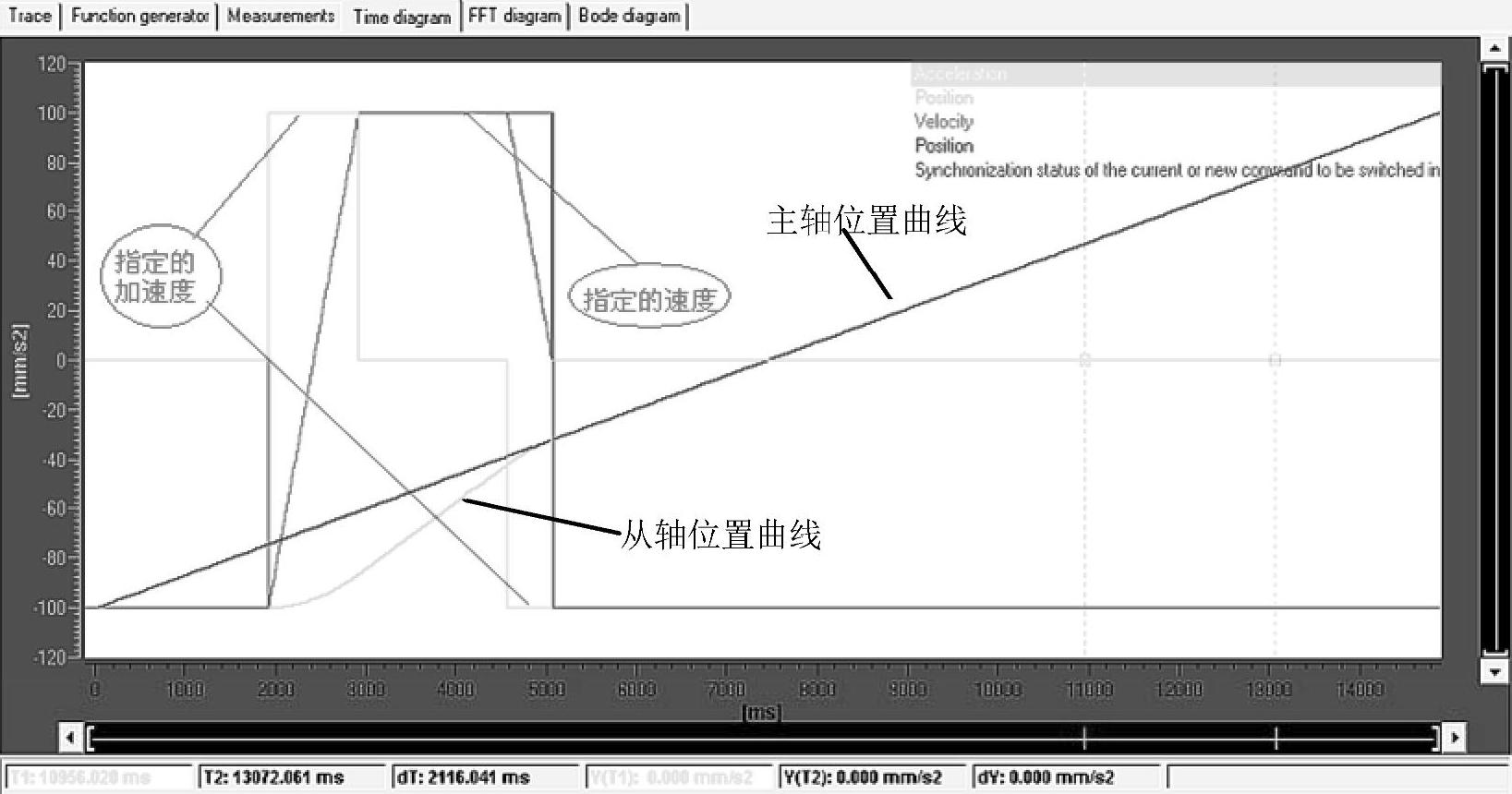
图6-10 由动态响应决定同步过程
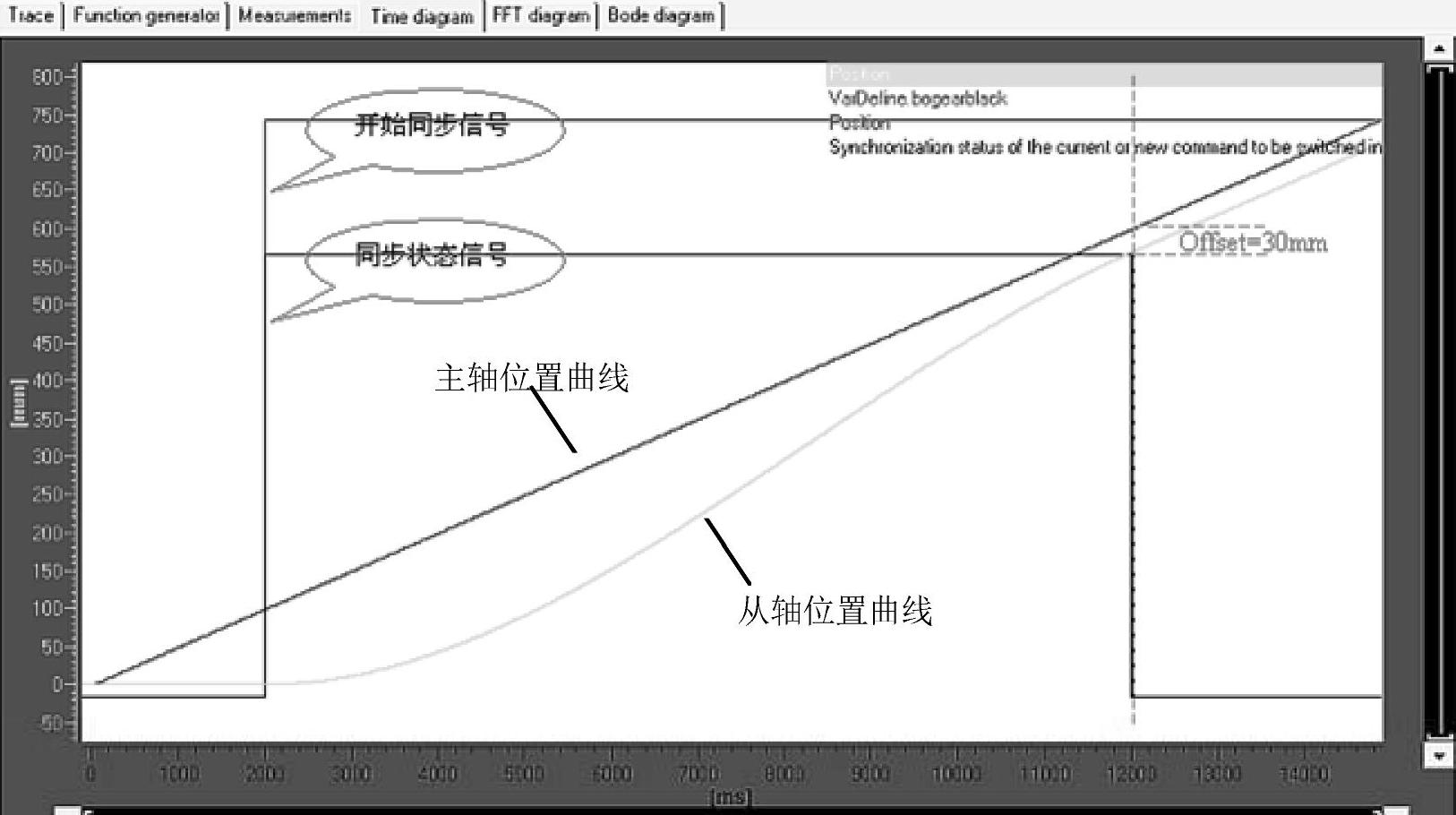
图6-11 SynchronizingMode=IMMEDIATELY_AND_SLAVE_POSITION
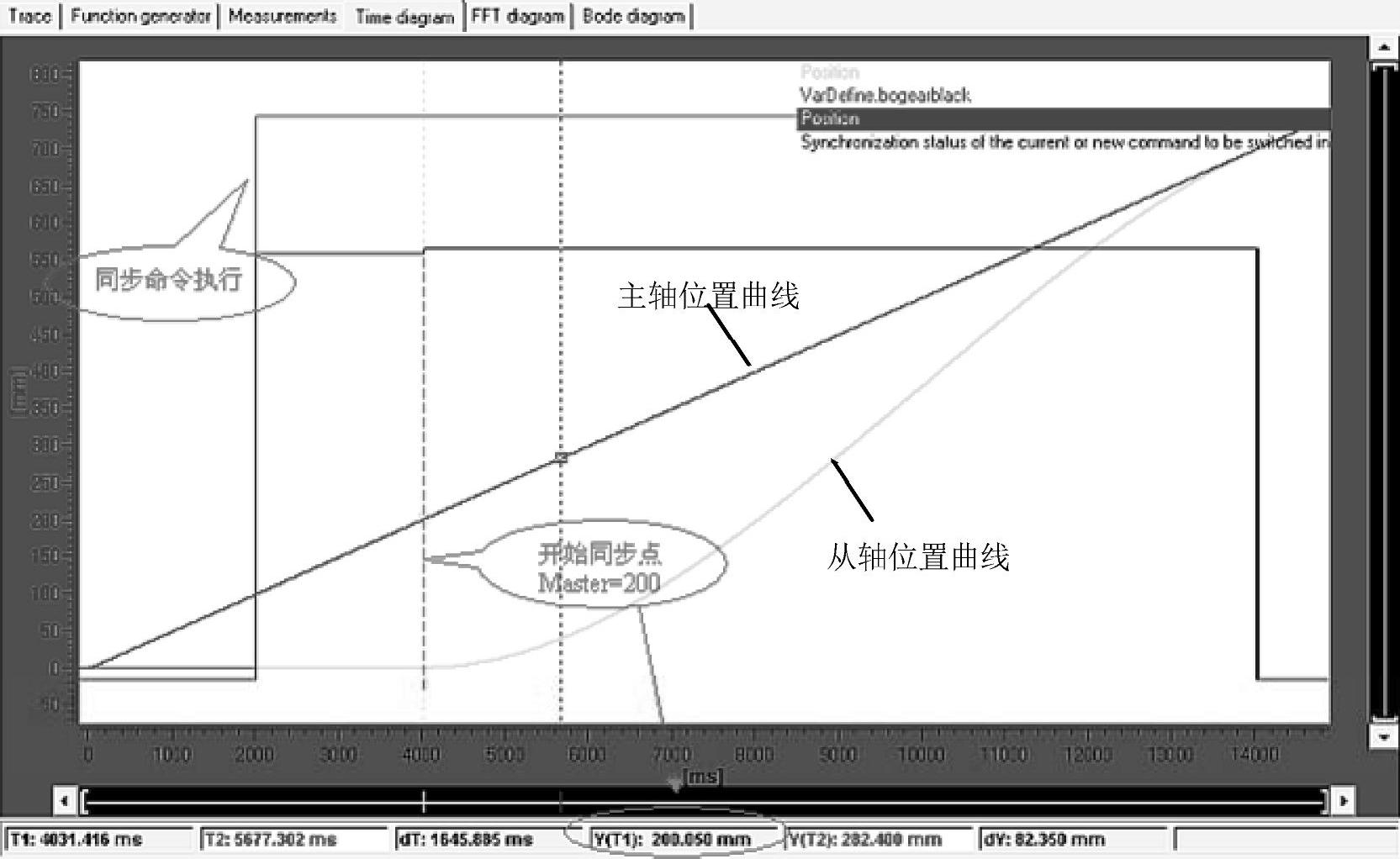
图6-12 SynchronizingMode=ON_MASTER_POSITION
该模式在周期性Cam同步时,在两个Cam曲线切换时使用,即在上次运行着的周期性Cam完成一个循环后运行本指令中指定的Cam。
3.同步位置参考(SynPositionReference)
同步位置参考决定了同步模式中指定的位置是作为同步过程的起点、终点还是对称点,同步开始点由同步长度或由动态响应参数决定。可设置为
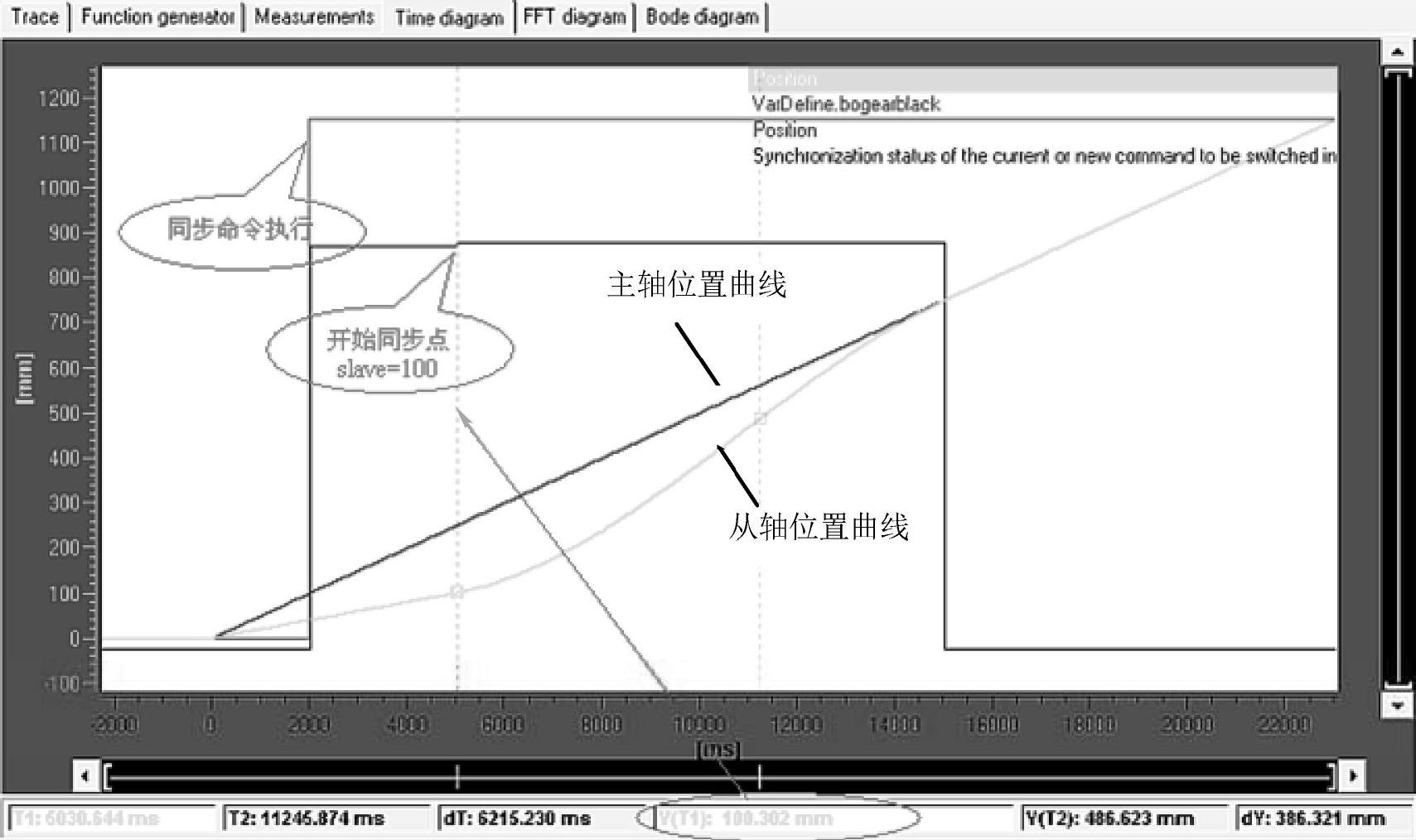
图6-13 SynchronizingMode=ON_SLAVE_POSITION
1)BE_SYNCHRONOUS_AT_POSITION:指定的位置是终点。
2)SYNCHRONIZE_WHEN_POSITION_REACHED:指定的位置是起点。
3)SYNCHRONIZE_SYMMETRIC:指定位置的是对称点,此时同步轮廓参考不能选择为RELATE_SYNC_PROFILE_TO_TIME。图6-14所示为同步模式为ON_MASTER_POSITION,同步位置为500mm,同步位置参考在不同设置下的从轴位置曲线,其中①为终点,②为起点,③为对称点。
4.同步方向(SynchronizingDirection)
同步方向决定同步过程中从轴的运动方向,可设置为
1)SYSTEM_DEFINED:按最短路径进行同步,从轴在同步运行过程中不反向。
2)SAME_DIRECTION:保持从轴的方向,如果从轴静止则为正向同步。
3)POSITIVE_DIRECTION:从轴的运动方向始终保持正向。
4)NEGATIVE_DIRECTION:从轴的运动方向始终保持负向。
5)SHORTEST_WAY:按最短路径进行同步,在使用模态轴时,从轴在同步运行过程中可能会反向运动。
图6-15所示为在主轴和从轴均为模态轴时,同步方向设为SHORTEST_WAY后,在不同的主轴位置启动同步时,从轴的运动方向是不同的。图中可以看出①号曲线中从轴一直正向运动,②号曲线中从轴先反向后正向运动。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。