



随着电子技术的迅速发展和在汽车上的广泛应用,汽车电气化程度越来越高。从发动机控制到传动系统控制,从行驶、制动、转向系统控制到安全保证系统及仪表报警系统,从电源管理到为提高舒适性而做的各种努力,使汽车电子系统形成了一个复杂的大系统。这些系统除了各自的电源线外,还需要互相通信,不难想象,若仍沿用常规的点对点的布线方式进行布线,那么整个汽车的布线将会如一团乱麻,其布线网络如图2-13所示。若采用总线方式布线(如CAN总线),则其布线图如图2-14所示。
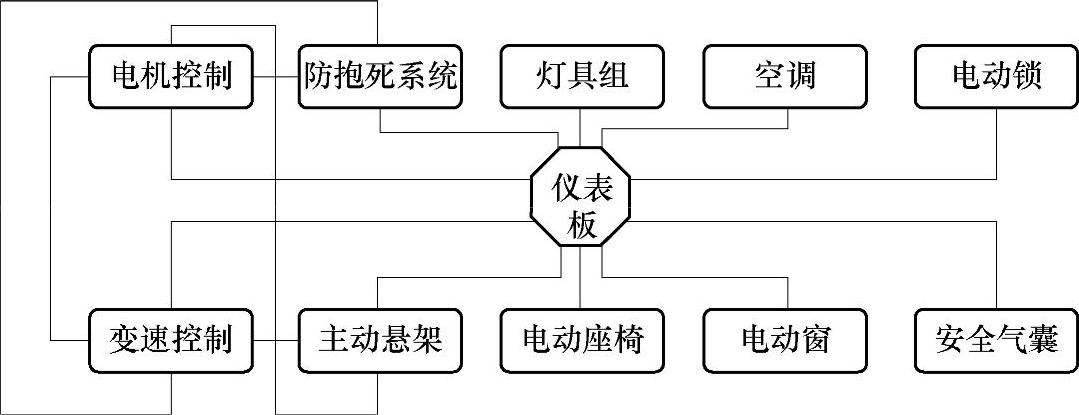
图2-13 常规方法布线网络图
CAN(Controller Area Network)即控制器局域网络。由于其高性能、高可靠性及独特的设计,CAN越来越受到人们的重视。
CAN最初是由德国的博世公司为汽车监测、控制系统而设计的。现代汽车越来越多地采用电子装置控制,如发动机的定时、注油控制,加速、制动控制(ASC)及复杂的抗锁定制动系统(ABS)等。由于这些控制需检测及交换大量数据,采用硬接信号线的方式不但烦琐、昂贵,而且难以解决问题,采用CAN总线可以使上述问题便得到很好的解决。
1993年,CAN成为国际标准ISO11898(高速应用)和ISO11519(低速应用)。CAN的规范从CAN 1.2规范(标准格式)发展为兼容CAN 1.2规范的CAN2.0规范(CAN2.0A为标准格式,CAN2.0B为扩展格式)。目前应用的CAN器件大多符合CAN2.0规范。(https://www.xing528.com)
在CAN 2.0B规范的基础上,对CAN的29位识别符进行具体的定义,建立起J1939协议的编码系统,从而形成SAEJ1939协议。目前它已成为货车和客车的通用通信协议。CAN规范和J1939协议的区别在于仲裁场的29位识别符。
CAN格式帧转换为J1939格式帧是通过协议数据单元(Protocol Data Unit,PDU)来实施的。J1939的PDU由P、R、DP、PF、PS、SA和DATA七部分组成,它对应于CAN协议扩展帧的29位识别符加上数据场。
SAEJ1939协议在货车和客车上得到了广泛应用,但对于拥有更多电子设备的轿车却没有统一的应用层协议。
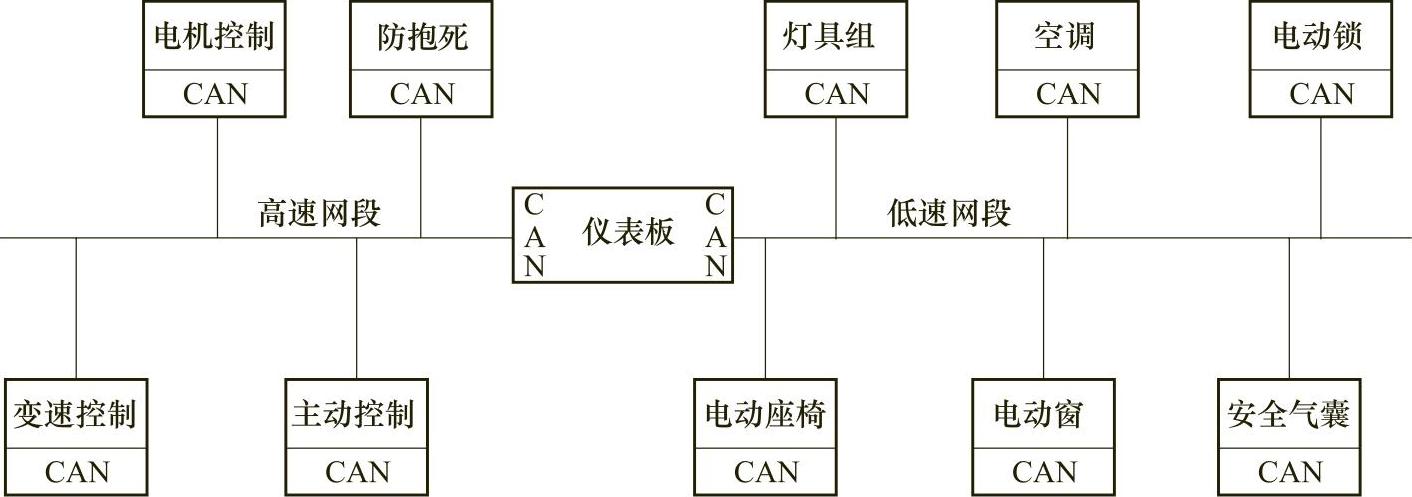
图2-14 CAN总线布线网络图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。